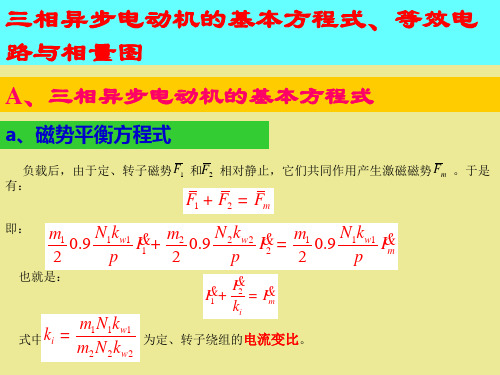
异步电机等效电路的简化
- 格式:ppt
- 大小:3.25 MB
- 文档页数:116

第6章习题解答6-1 一台三相笼型异步电动机铭牌数据为:额定电压V U N 380=,额定转速m in /960r n N =,额定频率Hz f N 50=,定子绕组Y 联接。
由实验测得定子电阻Ω=35.0s R ,定子漏感H L s 006.01=,定子绕组产生气隙主磁通的等效电感H L m 26.0=,转子电阻Ω=5.0'r R ,转子漏感H L r 007.0'1=,转子参数已折合到定子侧,忽略铁心损耗。
(1).画出异步电动机T 型等效电路和简化等效电路;(2).额定运行时的转差率N s ,定子额定电流N I 1和额定电磁转矩;(3).定子电压和频率均为额定值时,理想空载时的励磁电流0I ;(4).定子电压和频率均为额定值时,临界转差率m s 和临界转矩m T ,画出异步电动机的机械特性。
解:(1).异步电动机T 型等效电路和简化等效电路R L 'LL 'L(2).额定运行时的转差率100096041000100N s -==根据简化等效电路,定子额定电流1N I =额定电磁转矩'2113pr e NNn R T Is ω=,其中,160605031000N p f n n ⨯===,12N f ωπ=(3).定子电压和频率均为额定值时,理想空载时的励磁电流0I =(4).定子电压和频率均为额定值时,临界转差率2'212')(lr ls s r m L L R R s ++=ω和临界转矩em T =异步电动机的机械特性eT ns n 1emms 06-2 异步电动机参数如6-1题所示,画出调压调速在12N U 和23N U 时的机械特性,计算临界转差率m s 和临界转矩m T ,分析气隙磁通的变化,在额定电流下的电磁转矩,分析在恒转矩负载和风机类负载两种情况下,调压调速的稳定运行范围。
解:调压调速在12N U 和23N U 时的机械特性T en s临界转差率2'212')(lr ls s r m L L R R s ++=ω12N U 时,临界转矩em T=气隙磁通1ΦSm s N≈23N U 时,临界转矩em T=气隙磁通1ΦSm s N ≈带恒转矩负载L T 工作时,稳定工作范围为0m s s <<,带风机类负载运行,调速范围01s <<。

7.2 三相异步电动机的空载运行三相异步电动机的定子与转子之间是通过电磁感应联系的。
定子相当于变压器的一次绕组,转子相当于二次绕组,可仿照分析变压器的方式进行分析。
7.2.1 空载运行的电磁关系当三相异步电动机的定子绕组接到对称三相电源时,定子绕组中就通过对称三相交流电流,三相交流电流将在气隙内形成按正弦规律分布,并以同步转速n 1弦转的磁动势F 1。
由旋转磁动势建立气隙主磁场。
这个旋转磁场切割定、转子绕组,分别在定、转子绕组内感应出对称定子电动势,转子绕组电动势和转子绕组电流。
空载时,轴上没有任何机械负载,异步电动机所产生的电磁转矩仅克服了摩擦、风阻的阻转矩,所以是很小的。
电机所受阻转矩很小,则其转速接近同步转速,n ≈n 1,转子与旋转磁场的相对转速就接近零,即n 1-n ≈0。
在这样的情况下可以认为旋转磁场不切割转子绕组,则E 2s ≈0(“s ”下标表示转子电动势的频率与定子电动势的频率不同),I 2s ≈0。
由此可见,异步电动机空载运行时定子上的合成磁动势F 1即是空载磁动势F 10,则建立气隙磁场B m 的励磁磁动势F m 0就是F 10,即F m 0=F 10,产生的磁通为Φm 0。
励磁磁动势产生的磁通绝大部分同时与定转子绕组交链,这部分称为主磁通,用φm 表示,主磁通参与能量转换,在电动机中产生有用的电磁转矩。
主磁通的磁路由定转子铁心和气隙组成,它受饱和的影响,为非线性磁路。
此外有一小部分磁通仅与定子绕组相交链,称为定子漏磁通φ1σ。
漏磁通不参与能量转换并且主要通过空气闭合,受磁路饱和的影响较小,在一定条件下漏磁通的磁路可以看做是线性磁路。
为了方便分析定子、转子的各个物理量,其下标为“1”者是定子方,“2”者为转子方。
异步电动机在正常工作时的一些电磁关系在转子不转时就存在,利用转子不动时分析有助于理解其电磁过程。
一、转子不转时(转子绕组开路)异步电动机内的电磁过程转子绕组开路时,转子电流为零,定子电势和转子电势的大小、频率1E ∙、2E ∙和1f ;1)转子绕组开路,定子绕组接三相交流电源, 定子绕组中产生三相对称正弦电流(空载电流),形成幅值固定的气隙旋转磁场,旋转速度为1160f n p =; 2)由于转子不动,旋转磁场在定子绕组、转子绕组中感生频率均为1f 的正弦电动势;11111222224.444.44{N N E j f k N E j f k N =-Φ=-Φ (7.2)式中k N1、 N 1 ——定子 每相有效串联匝数。

异步电动机等效电路理论说明1. 引言1.1 概述异步电动机作为一种常见的电动机类型,在现代工业生产中扮演着重要的角色。
它被广泛应用于各个领域,如制造业、交通运输、能源等,其高效率和可靠性使其成为首选设备之一。
理解异步电动机的基本原理以及建立有效的等效电路模型对于设计、控制和故障诊断都具有重要意义。
1.2 文章结构本文将对异步电动机的等效电路进行深入研究,并介绍建立等效电路模型的方法和理论。
首先,我们将简要介绍异步电动机的基本原理,包括其工作原理、特点和应用领域。
然后,我们将详细讨论等效电路建模方法和参数确定方法,并说明定子绕组等效参数计算的意义。
接下来,通过具体案例研究,我们将分析和探讨等效电路在启动过程中、负载变化时以及故障诊断中的应用。
最后,在结论部分总结主要研究成果,并指出存在问题及未来改进方向与研究方向。
1.3 目的本文旨在提供关于异步电动机等效电路的理论说明,探讨建立等效电路模型的方法和参数确定方法,并应用实例分析其在启动、负载变化和故障诊断中的应用。
通过本文的阐述,读者将能够深入了解异步电动机的工作原理和特点,并学习到建立有效等效电路模型的重要性以及其在工程实践中的应用价值。
2. 异步电动机的基本原理:2.1 三相异步电动机简介:三相异步电动机是一种常见的交流电动机,通常由定子和转子两部分组成。
其特点在于定子绕组与AC电源产生旋转磁场,而转子则通过感应来产生运动。
这种类型的电动机广泛应用于各种领域,包括工业、农业和住宅等。
2.2 异步电动机的工作原理:异步电动机的工作基于“感应”现象。
当三相交流电源通过定子绕组时,会在定子上产生一个旋转磁场。
这个磁场会切割到转子导体中,并在导体中引起感应电流。
根据楞次定律,这个感应电流会形成一个反向磁场,与定子旋转磁场互相作用。
这个互相作用导致了转子开始旋转,并因为变化的磁场而保持运动。
由于存在滑差(即旋转速度不同造成的差异),异步电动机无法实现同步运行。
电气传动2015年第45卷第4期异步电机电感参数的离线辨识候春辉,单亚飞,李峰,王曦冉(天津大学电气与自动化工程学院,天津300072)摘要:在异步电动机反Γ型等效电路的基础上,提出了一种定转子总漏感与互感的离线辨识方法。
在已有的异步电机运动控制平台上进行含高频成分很重的单相脉冲和单相低频正弦实验,然后根据霍耳传感器检测到的电压电流信号,经傅立叶变换来实现对异步电机参数的辨识,实验表明辨识结果具有较高的精度。
并对逆变器的死区效应进行了一定的补偿,使计算得出的电压与逆变器实际输出电压基本一致,电流波形接近正弦波,补偿效果能满足参数辨识精度的要求。
关键词:异步电机;参数辨识;死区补偿;傅里叶变换中图分类号:TM343文献标识码:AOff ⁃line Identification for Inductance Parameter of Asynchronous MotorHOU Chun⁃hui ,SHAN Ya⁃fei ,LI Feng ,WANG Xi⁃ran(School of Electrical and Automation Engineering ,Tianjin University ,Tianjin 300072,China )Abstract:On the basis of the inverse Γ⁃form equivalent circuit of asynchronous motor ,an off⁃line identificationmethod of leakage inductance and mutual inductance was presented.The tests of single ⁃phase pulse with high ⁃frequency component and single⁃phase low⁃frequency sine wave were performed on the existing asynchronous motor motion control platform ,then based on the voltage and current signals detected by hall sensors ,the identification for induction parameters of asynchronous motor was implemented through the Fourier transform.The test results show that the identification has high accuracy .In addition ,a suitable compensation for the dead time effect of the inverter was considered ,which makes certain that the calculated voltage is basically same with the actual output voltage of theinverter and the current waveform is close to sine wave ,the effect of the compensation can meet the accuracy requirements of parameter identification .Key words:asynchronous motor ;parameter identification ;dead time compensation ;Fourier transform作者简介:候春辉(1989-),男,硕士研究生,Email :*****************1引言在工业控制中,对交流调速系统的性能需求越来越高,这使得矢量控制、直接转矩控制等一些高性能的调速理论广泛地应用于实际调速系统之中[1-2]。