六自由度运动方程计算
- 格式:pdf
- 大小:305.77 KB
- 文档页数:18
第6期2021年2月No.6February ,2021六自由度机器人运动学及主要构件的有限元分析摘要:文章以六自由度机器人为研究对象,根据实际的作业情况,对机器人进行运动学分析以及主要构件的有限元分析。
运动学分析分为正运动学分析和逆运动学分析,解决的是机器人的手臂转向何方,分析的是手部的速度、加速度和位移。
有限元分析主要是机械系统静力学分析。
对主要构件建立模型、模型简化、网格划分,根据危险工况的受力情况,分析了各构件的应力、形变等性能,确保结构设计合理。
对于工业机器人机械结构、传动等方面,运动学和有限元分析能够判断整机设计是否达到设计目标,对结构件的优化设计具有重要的意义。
关键词:六自由度;机器人;运动学;有限元分析中图分类号:TP242.2文献标志码:A 程锴(南京以禾电子科技有限公司,江苏南京210039)作者简介:程锴(1981—),男,江苏南京人,工程师,硕士;研究方向:电子产品总体结构设计。
江苏科技信息Jiangsu Science &Technology Information引言在当前科学技术不断进步和快速发展的背景下,很多先进的技术手段被广泛应用在各个领域中[1]。
特别是机器人在工业中得到广泛的应用,在实际运行过程中,类似于码垛搬运的六自由度机器人在搬运货物中节省大量劳动力,但安全性与可靠性一直备受考验。
因此,本文主要对六自由度机器人进行运动学和静力学分析[2]。
机器人运动学研究解决的是机器人的手臂转向何方,分析的是手部的速度、加速度和位移。
运动学方程是进行机器人位移分析的基本方程,也称为位姿方程。
机器人运动学分为正运动学分析和逆运动学分析。
正运动学是机器人运用各个关节角度、各个构件车长度等已知条件来判断末端执行器在三维空间中的位置;而逆运动学正好相反,它解决的是机器人需要如何运动才能使得末端执行器到达指定位置这一问题。
静力学分析用来分析结构在给定静力载荷作用下的响应。

六自由度机械臂逆运动学算法六自由度机械臂逆运动学算法六自由度机械臂逆运动学算法朱齐丹王欣璐(哈尔滨工程大学,哈尔滨,150001)摘要:根据D-H参数法确定六自由度机械臂的运动学方程,结合平面几何法和欧拉角变换法将机械臂的逆运动学求解问题分为两部分,一通过平面几何法确定机械臂腕部点的坐标与前三个关节角的关系,二通过欧拉角变换法确定机械臂末端姿态与后三个关节角的关系,根据逆运动解的选取原则从八组解中选取最优解;利用MATLAB中的Robotics Toolbox建立机械臂的正运动学模型,通过多组位姿下的正逆运动解对比验证逆运动学求解算法的准确性;利用VC++中的QueryPerformanceCounter函数和MATLAB中tic-toc 语句得到不同算法所消耗的平均时间,通过消耗时间的对比说明该算法的快速性;利用VC++编程实现机械臂写字的过程,通过对比输入字的形状与机械臂末端的实际运动轨迹,进一步验证该算法是一种快速而准确的逆运动学求解算法。
关键词:机器人,六自由度,机械臂,逆运动解,平面几何法,欧拉角变换法0 引言机械臂被广泛应用于机械制造、航空航天、医疗和原子能等领域,机械臂的逆运动学问题是其轨迹规划与控制的重要基础,逆运动学求解是否快速准确将直接影响到机械臂轨迹规划与控制的精度,因此针对工业中常用的六自由度机械臂,设计一种快速准确的逆运动学求解方法是十分重要的。
目前,机械臂逆运动学的求解方法主要有:迭代法、解析法和几何法。
迭代法虽然在大多数情况下是可行的,但却无法得到全部解;解析法计算较为复杂,但可以得到全部根;几何法针对机械臂的某些特殊结构进行简化,再进行求解,虽然对于一般机械臂不通用,但是其形式简单,求解所需的计算量远远小于迭代法和解析法。
Paul 等[1]于1981年提出的解析算法对后来的机械臂逆运动学问题研究有着指导性意义。
Regnier[2]于1997年提出一种基于迭代法和分布式的算法,能够求出多种结构的六自由度机械臂的位置逆解,但相应的计算时间也会变长。
六自由度混联机构运动学分析周辉;周睿;朱景原;丁泽华;曹浩峰;曹毅【摘要】混联机构结合了并联机构和串联机构两者的优点,有效地扩大了机器人的应用范围.提出了一种由两个不同的三自由度并联机构串接而成的混联机构,对其进行运动学分析,分别求取上下两个并联模块的运动学正解方程,从而得到整个混联机构的运动学正解.通过给定机构结构参数和驱动输入参数,用一组算例求得运动学动平台位姿,并画出三维机构位姿状态图模型,更加直观地了解机构的位姿状态.然后求解其运动学逆解,按照运动学正解结果,给定机构的两组位姿,求得此时机构的驱动输入参数及各转动副的状态,对比正反解的结果,进而验证了双并联型混联机构运动学正反解模型的正确性.最后,在运动学分析的基础上,利用极限坐标搜索法,结合混联机构的运动学反解,给出机构工作空间求解的算法.给定机构的结构参数,考虑杆长约束、关节转动副约束及杆件干涉等影响条件下,利用数值搜索法在圆柱坐标系中搜索工作空间的边界.在Matlab软件中仿真得到混联机构在给定不同姿态下的位置工作空间和给定位置下的姿态工作空间.%Hybrid mechanisms combine the advantages of parallel mechanisms and series mechanisms,which can effectively expand the application field of robot.A hybrid mechanism is presented,which is combined by two different 3-DoF parallel mechanisms connected in series.Through the analysis of the kinematics of the upper and lower parallel modules,the forward kinematics solution of the whole hybrid mechanism is obtained.A set of numerical examples of position and posture of the moving platform is obtained by given the structural parameters and driving parameters,meanwhile,the 3D models of the mechanism are obtained in order to more intuitive understanding of themechanism.Then the inverse kinematics solution is solved.According to the forward kinematic results,a group of position and posture is given to obtain the driving input parameters of the mechanism and the state of each rotation pair,by compared with the result of the forward and inverse solutions,the correctness of the forward and inverse solution is verified.Finally,on the basis of kinematics analysis,using limit coordinate searching method,algorithm of working space is put out.Considering the length constraints,joint constraint and the interference of the member,the boundary of workspace is obtained in cylindrical coordinates by given the structural parameters.Position workspace respect to a variety of postures posture and orientationworkspace respect to a variety of positions are simulated in Matlab.【期刊名称】《东华大学学报(自然科学版)》【年(卷),期】2017(043)005【总页数】11页(P709-719)【关键词】混联机构;运动学;极限坐标搜索法;工作空间【作者】周辉;周睿;朱景原;丁泽华;曹浩峰;曹毅【作者单位】江南大学机械工程学院,无锡江苏214122;江苏省食品先进制造装备技术重点实验室,无锡江苏214122;江南大学机械工程学院,无锡江苏214122;江苏省食品先进制造装备技术重点实验室,无锡江苏214122;江南大学机械工程学院,无锡江苏214122;江苏省食品先进制造装备技术重点实验室,无锡江苏214122;江南大学机械工程学院,无锡江苏214122;江苏省食品先进制造装备技术重点实验室,无锡江苏214122;江南大学机械工程学院,无锡江苏214122;江苏省食品先进制造装备技术重点实验室,无锡江苏214122;江南大学机械工程学院,无锡江苏214122;上海交通大学系统控制与信息处理教育部重点实验室,上海200240;江苏省食品先进制造装备技术重点实验室,无锡江苏214122【正文语种】中文【中图分类】TH112混联机构结合了传统的串联机构和并联机构的优点,具有承载能力强、刚度大、精度高、工作空间大等优点,有效地扩大了机器人的应用领域[1-2].混联位置分析是机构分析中的基础问题,并联机构的位置分析具有反解简单、正解复杂的特点,而串联机构正好相反.两者综合起来,混联机构的位置正解和反解都变得极为复杂[3]. 目前对于混联机构整体位置正反解的研究较少.Pisla等[4]研究了一种由PARAMIS 机器人和一个新型串联定位模块组成的混联机构,并给出了数值解.Zeng等[5]研究了空间多回路运动支链的串并联型混联机构,提出了一种分析输出位移子集和空间多支链机构的自由度的方法.文献[6]提出了一种适用于重载操作的串并联锻造机械臂,根据机构的几何约束求得了封闭形式的运动学正反解.刘海涛等[7]研究了一类由二自由度球面并联机构和一条通过移动副与之串接的两转动一移动串联运动链组成的五自由度可重构混联机械手的设计和尺度综合问题.Lu等[8]提出了一种上端由3-RPS并联机构,下端由3-SPR并联机构串接起来的混联机构,分析了机构的位置正反解、速度、加速度、位置工作空间和姿态工作空间.本文提出的混联机构由两个并联机构模块串接而成,每个并联模块由两条SPS六自由度的支链,由于其具有6个自由度,故只需对另外一条支链进行运动学分析即可.然后分析了机构的位置工作空间和姿态工作空间,对该混联机构的推广应用提供一定的理论基础.混联机构由两个并联机构串联起来,每个并联机构都有3个自由度.如图1所示,位于混联机构下端部分的并联机构具有两条SPS支链和一条RPR支链,其中RPR 支链3个运动副呈R1⊥P⊥R2.上面的并联机构具有两条SPS支链和一条RRR支链,其中RR支链的3个转动副相互垂直,呈R3⊥R4⊥R5. R2和R3的转动轴线相互垂直.下面并联机构模块的驱动是位于3条分支上的3个移动副,上面并联机构模块的驱动是两个位于分支上的移动副和另一条支链上中间的R4转动副.上下两个并联机构的动平台和静平台都是正三角形.正确分析计算机构自由度是机构结构分析的基础,是机构运动学分析的重要内容.机构自由度分析为确定机构驱动数目及进行运动学分析提供了依据.位于底部的并联机构2SPS+RPR称为并联模块1,位于上端的并联机构2SPS+RRR称为并联模块2.整个混联机构总的构件数目n=15,包括一个静平台,一个动平台,一个中间平台.运动副有g= 18,包括8个球副S,5个移动副P,5个转动副R.由于SPS支链都可以绕着自身两端的球副旋转,所以每条SPS支链存在一个局部自由度[9],因此ζ=4.运用计算空间机构自由度的Grübler-Kutzbach公式得到此混联机构的自由度[10]为式中:fi为第i个运动副的自由度数;ν为并联冗余约速,这里不存在.由式(1)可知,此双并联型混联机构具有6个自由度.混联机构附坐标系的机构简图如图2所示.R2和R5转动副的轴线分别垂直于支链A3B3和B3D3,它们分别与B3B2和D3D2重合.参考坐标系OXYZ以A3为原点置于静平台上,OX轴与A3A2共线,坐标原点O与A3点重合.坐标系O1X1Y1Z1的Z1轴附于支链A3B3上,坐标原点O1与A3点重合.O2X2Y2Z2附于中间平台上,O2X2轴与B3B2共线,坐标原点O2与B3点重合.R2和R3的转动轴线相互垂直.坐标系O3X3Y3Z3和坐标系O4X4Y4Z4分别固定在支链B3D3的两端,Z3轴和Z4轴与B3D3重合,坐标原点O3和O4分别与B3和D3点重合.O5X5Y5Z5位于上部并联机构的动平台上,O5X5的轴线即转动副的R5的轴线沿着D3D2方向,坐标原点O5与D3点重合.由机构的坐标关系可得相应的变换矩阵为式中:si和ci(i=1, 2, 3, 4, 5)分别表示sin θi和cos θi,θi表示i个转动副的角度;L3=‖A3B3‖;L6=‖B3D3‖;Ai表示坐标系OiXiYiZi相对于坐标系Oi-1Xi-1Yi-1Zi-1的变化(i=1, 2, 3, 4, 5).混联机构的变换矩阵可以写为首先,给定驱动支链坐标系及驱动支链的长度为L1, L2, L3, L4, L5和驱动角度θ4,分别求取两个并联机构的运动学正解,然后再求整个混联机构的运动学正解.末端操作器的位置相对于参考坐标系可以写为式中: AM1=A1A2, AM2=A3A4A5分别为上下两个并联机构的齐次变换矩阵.AM1是描述中间动平台相对于参考坐标系的位置和姿态的齐次变换矩阵,AM2是描述上面并联机构动平台相对于坐标系O2X2Y2Z2的位置和姿态的齐次变换矩阵.5rp是动平台相对于坐标系O5X5Y5Z5的向量.本文中左上标表示向量相对的坐标系,相对于参考坐标系OXYZ则没有上标.首先定义静平台和动平台上各端点关于各自坐标原点的向量,得到下面4个向量如式(4)~(7)所示.位置向量OBi(i=1, 2)相对于参考坐标系可以写为支链长度L1和L2(L1=A1B1, L2=A2B2)可以写为式中:‖·‖表示欧式范数.将其展开得到支链一和支链二的表达式为化简式(10)和(11)可以得到下列带有未知角θ1和θ2的方程:式中: p1、 p2、 q1、 f1、 f2、 f3、 f4、 f5、 f6、 L3的表达式为由式(12)可以得到θ1的表达式.化简式(12)并用三角函数万能公式进行代换,得到θ1的解为得到θ1解之后,整理式(13)就可以写为式中: p3=f3+f5s1; p4=f4; q2=-f1s1-f2c1-f6.这样,式(15)就和式(12)保持相同的形式,使用相同的三角函数万能公式代换可求出θ2的解为由于θ1的解有两个,所以p3, q2的解有两个,所以代入求θ2的解就有4种情况.得到θ1和θ2的解,把它们代入A1和A2中,就可以得到下端并联机构变换矩阵AM1的形式.这样就得到了下端并联机构的位置正解.下端并联模块正解有4组解.上端并联机构的位置正解可以通过和下部并联机构类似的求解方法得到.首先,得到以下向量:位置向量O2Di(i=1, 2)相对于坐标系O2X2Y2Z2可以写成:支链长度L4和L5(L4=B1D1, L5=B2D2)可以写为将式(17)、(18)和式(21)所得的2O2D1、 2O2D2代入式(22)就可以得到:将式(23)和(24)展开,并化简可以得到下列两个有关于未知角θ3和θ5的方程为式中:式(25)是一个关于θ3的表达式.化简式(25)并用三角函数万能公式进行代换,得到θ3的解为得到θ3的解之后,就可以将式(26)写为式中:v3=w3+w5s3; v4=w4+w6c3; q4=-w1s3-w2c3-w7.运用三角函数万能公式,同理就可以求出θ5的解为由θ3和θ5的表达式可知,θ3和θ5都有两种表达形式,故θ3有两组解,而θ5表达式中的v3、 v4和q4都是关于θ3的表达式,将不同的θ3值代入v3、 v4和q4中,会得到两组不同的解,所以θ5也就有4组解.因此上部并联机构模块也有4种情形.此六自由度混联机构的两个并联模块都有4种位置正解,这样每个并联模块都可以通过4种方式达到指定的位置.通过上述推导得到θ1,θ2,θ3和θ5的表达式,就可以求出整个六自由度混联机构的位置正解变化矩阵A.式中:nx=c4(c1c3-c2s1s3)+s1s2s4;ny=c2s4+c4s2s3;nz=c1s2s4-c4(c3s1+c1c2s3);ox=s5(c1s3+c2c3s1)-c5[s4(c1c3-c2s1s3)-c4s1s2];oy=c5(c2c4-s2s3s4)-c3s2s5;oz=c5[s4(c3s1+c1c2s3)+c1c4s2)-s5(s1s3-c1c2c3);ax=s5[s4(c1c3-c2s1s3)-c4s1s2]+c5(c1s3+c2c3s1);ay=-s5(c2c4-s2s3s4)-c3c5s2;az=-s5[s4(c3s1+c1c2s3)+c1c4s2]-c5(s1s3-c1c2c3);px=L3s1+L6(c1s3+c2c3s1);py=-L6c3s2;pz=L3c1-L6(s1s3-c1c2c3).对于矩阵A前三行三列表示混联机构末端执行器的姿态方程,式(31)为混联机构的位置方程.根据六自由度混联机构的运动学位置正解,通过具体算例来验证此混联机构的位置正解.定义整个混联机构的结构尺寸参数并给定一组驱动构件的输入参数L1、 L2、L3、 L4、 L5、θ4,根据运动学正解求解公式,采用数值法分别求出上下两个并联机构模块的位置正解的解析解.分别得到上端和下端并联机构模块静平台和动平台正三角形三个端点相对于世界坐标系的位置坐标,给出位姿的三维位姿图,更加直观地了解机构的位置和姿态.给定整个混联机构的尺寸参数如下:上下两个并联机构模块的动平台和静平台都是正三角形,假定下面并联机构模块的静平台边长为0.5 m,动平台的边长为0.4 m.下端并联机构模块结构参数如表1所示.由于上端并联机构模块的静平台和下面并联机构模块的动平台重合,所以上面并联机构模块的静平台边长也为0.4 m,假定上面并联机构模块的动平台边长为0.3 m.上端并联机构模块的结构参数如表2所示.同时,上端并联机构模块的第三条支链长度给定L6=0.5 m.给定六自由度混联机构运动输入如表3所示.根据上述输入,就可以得到下端并联机构模块的各端点相对于参考坐标系的位置坐标数值,如表4所示.上端并联机构模块各端点相对于参考坐标系的位置坐标数值,如表5所示.上述分析得到了上下两个并联机构模块动平台和静平台各端点相对于各自静平台的位置坐标.由于上端并联机构模块的静平台与下端并联机构模块的动平台重合,故将上端并联机构模块的静平台位置与下端并联机构模块的动平台位置保持一致.只需将上端并联机构模块静平台的3个点B1、 B2、 B3的坐标值乘以变换矩阵AM1,就可以得到B1、 B2、 B3在坐标系OXYZ下的值.同理,将上述求得的D1、 D2、 D3点的坐标值也需要相应地乘以变换矩阵AM1,就可以得到如表6所示的D1、 D2、 D3点在坐标系OXYZ下的值.对于整个六自由度混联机构,可以得到机构在此输入状态下的4种位姿情况,如图3所示.这4种不同解析解情况下的位姿与表6给出的解析解对应.由图4可以直观地看出,第四组数值解支链之间不会发生干涉,符合要求.在给定双并联型混联机构上平台的位姿参数,求整个机构输入关节的运动状态是运动学位姿反解问题.求此混联机构的位置反解,就是给定上端并联机构模块动平台上末端的位姿,求解6个驱动,即5个移动副Li(i=1, 2,…, 5)和1个转动副θ4.假定给定混联机构末端执行器的位姿用变换矩阵表示为式中:px, py, pz表示固连在上端并联机构模块末端执行器上的坐标系O5X5Y5Z5原点O5的位置坐标.由式(30)可以得到混联机构的位置向量可以写成p=(px, py, pz, 1)T,式中px, py, pz的值如式(31)所示.将式(2)左右两边同时右乘可以得到:代入展开可得:令方程(34)左右两边的(1, 3),(2, 3),(3, 3)元素相等,可得:观察发现式(31)中py的表达式与式(36)表达式右边都有s2c3,所以把式(31)中py 的表达式代入式(36)可以得到:式中:q5=py/L6.同理,将式(35)代入式(31)中px,式(37)代入式(31)中pz,可以得到:将式(39)和(40)左右两边同时取平方然后相加就可以得到驱动L3的表达式为由于θ5有两组解,故L3也就有两组解.将L3的值代入式(39)和(40)中,从而可以得到θ1的表达式为式中:s1=;c1=.将式(2)两边同时左乘可以得到:由式(43)第二行第四列左右两边的元素相等可得:从而可以得到θ2的表达式为由θ2的表达式可知,θ2有两组解.将式(31)中px的表达式写成:式中:f1=c1; f2=s1c2; f3=.由式(46),并用三角函数万能公式就可以得到θ3的表达式为由θ3的表达式可知,θ3有两组解.由式(43)所得的左右两个矩阵,令第一行第一列左右两边的元素与第二行第一列左右两边的元素分别相等可得:从而就可以得到θ4的表达式为由式(38)、(42)、(45)、(47)、(50)就得到了θi(i=1, 2,…, 5) 的值,由此可以写出所有的变换矩阵Ai(i=1, 2,…, 5)的表达式.从而可以写出移动副驱动的表达式为式中:OBi=A1A22O2Bi;ODi=A5O5Di.至此,推导得到了六自由度双并联型混联机构的运动学逆解.已知运动学输出位姿,就可以求解得到机构5个移动副输入L1、 L2、 L3、 L4、 L5和1个转动副输入θ4的解.由于θ5、θ2、θ3都有两组解,所以此混联机构具有8组解.根据双并联型混联机构的位姿逆解的分析,给定混联机构结构参数,然后给定动平台的位置与姿态参数.选取与之前正解算例相同的结构参数,并且以混联机构位置正解算例中得到的数值解作为反解的输入,从而实现双并联型混联机构位置正反解模型的相互验证.给定混联机构的结构参数如表1和表2所示.由位置正解分析的三维模型位姿图3可知,位置正解的第四组数值解支链之间不会发生干涉,符合要求.所以取i=4时的结果,此双并联型混联机构的位姿变换矩阵为将此时的位姿状态作为输入,代入双并联型混联机构运动学逆解求解公式中,利用Matlab软件求得各运动副的状态如表7所示.对逆解所得的8组数据进行分析可以发现,第八组输入参数与位置正解算例中的第四组输入参数相同.在此将两组数据单独提炼出来进行比较分析,如表8所示.经过比较之后发现,双并联型混联机构的两者之间存在微小误差,且误差可以忽略不计.经过两组解的对比,发现用正解得到的双并联型混联机构末端位姿作为输入,求得的机构驱动输入参数与一开始求正解的输入参数相同,两者之间的误差微乎其微.验证了运动学正反解的正确性.工作空间分析在混联机构的分析中占有非常重要的地位[11].混联机构工作空间会受到很多因素的影响,机构整体尺寸的大小,移动副P行程的约束,转动副R转角(包括虎克铰U、球铰S)角度值的限制,机构中各杆件之间的干涉现象都会对其产生影响[12].机构在不同的限定条件下,其工作空间的形状和体积都会不一样[13].不同的机构根据不同的用途和应用场合会提出不一样的限制因素,每种因素的限制条件也不尽相同.在实际应用中,也会考虑成本因素提出不同的限制条件[14].对本文混联机构的位置可达工作空间进行分析,运用运动学反解分析结果,结合极限边界数值搜索算法,求出其位置工作空间的形状.求解位置工作空间内所有点的算法如图4所示.给定合适的机构尺寸,通过圆柱坐标系逐个搜索,将Z坐标等分成n份,然后在每个Z坐标截面下,搜索边界轮廓,直到在整个Z坐标下都搜索完成后,所有的边界轮廓组合起来就是整个混联机构的工作空间边界图[15].运用Matlab数学软件采用上述的算法,结合混联机构的运动学反解和约束条件对工作空间的算法进行编程,求解了给定算例的工作空间.给定机构参数与运动学算例保持一致.针对此双并联型六自由度混联机构,为了得到其位置工作空间,可以先将其末端固定在给定的姿态下,从而得到在此姿态下机构所能到达的所有满足约束条件的位置空间.由于混联机构上下两个并联模块的机构尺寸不一样,给定双并联混联机构的移动副的运动范围为0.5 m≤Li≤0.8 m (i=1, 2, 3),0.3 m≤Li≤0.5 m (i=4, 5),转动副的运动范围为-≤θi≤ (i=1, 2, 3, 4, 5).首先由蒙特卡洛法根据输入参数的变化范围得到机构的大致位置点云图,判断机构的大致位置.限定Z坐标的变化范围为[0.75, 1.7],r≤2.利用上面给定的约束条件,用Matlab软件编程,给出机构在给定不同姿态情况下的定姿态位置工作空间,结果如图5所示,其中用YXZ欧拉角表示机构动平台的姿态.由图5可知,改变机构的姿态角,就可以得到不同定姿态的位置工作空间.这4种姿态条件下得到的位置工作空间边界图大致是一个从上到下边界逐渐增大的近似拉长的连续锥形体.当姿态角达到(20°,20°,20°)时,机构的位置可达工作空间有一个凹洞,说明机构在此位置范围内存在奇异位形.根据定姿态位置工作空间图可以看出该混联机构位置在(0, 0, 1.3)时,具有较为规则的位置工作空间边界,所以选择在此位置进行机构的姿态工作空间搜索,其得到的姿态工作空间是指与末端执行器固结在一起的坐标系在该位置所能实现的所有的姿态坐标的集合,如图6所示.(1) 本文介绍了双并联型六自由度混联机构的结构,求解了机构的自由度数目.指定机构驱动构件,通过分别对下端并联机构模块和上端并联机构模块的运动学正解分析,得到整个混联机构的运动学正解.通过给定机构结构参数和驱动输入参数,用一组算例求得运动学动平台位姿,并画出三维机构位姿模型.然后求解运动学逆解,按照运动学正解结果,给定机构的两组位姿,求得此时机构的驱动输入参数及各转动副的状态,对比正反解结果,进而验证了双并联型混联机构运动学正反解模型的正确性.(2) 根据混联机构的运动学反解,利用极限边界搜索法给出机构工作空间的算法.给定机构的结构参数,考虑工作空间影响因素,利用数值搜索法在圆柱坐标系中搜索工作空间的边界.在Matlab软件中仿真得到了混联机构在给定不同姿态下的位置工作空间和给定位置下的姿态工作空间.【相关文献】[1] 姜铭,孙钊,秦康生,等.混联机器人的分析与研究[J].制造业自动化,2009,31(1):61-65.[2] 伞红军.新型五轴并串联机床的运动学分析与结构参数设计[D].哈尔滨:哈尔滨工业大学机电工程学院,2009.[3] 高建设,李明祥,侯伯杰,等.新型四足步行机器人串并混联腿的运动学分析[J].光学精密工程,2015,23(11):3147-3160.[4] PISLA D, SZILAGHYI A, VAIDA C, et al. Kinematics and workspace modeling of a new hybrid robot used in minimally invasive surgery[J]. Robotics and Computer-Integrated Manufacturing, 2013, 29(2):463-474.[5] ZENG Q, FANG Y. Structural synthesis and analysis of serial-parallel hybrid mechanisms with spatial multi-loop kinematic chains[J]. Mechanism & Machine Theory,2012, 49(3):198-215.[6] CHANGYA YAN, FENG GAO, YONG ZHANG. Kinematic modeling of a serial-parallel forging manipulator with application to heavy-duty manipulations#[J]. Mechanics Based Design of Structures & Machines, 2010, 38(1):105-129.[7] 刘海涛,黄田,CHETWYND D G,等.5自由度大工作空间/支链行程比混联机械手的概念设计与尺度综合[J].机械工程学报,2007,43(6):14-20.[8] LU Y, DAI Z, YE N, et al. Kinematics/statics analysis of a novel serial-parallel robotic arm with hand[J]. Journal of Mechanical Science & Technology, 2015, 29(10):4407-4416.[9] 石岩,路懿.一种2SPS+RPRR并联机构的运动学与工作空间分析[J].燕山大学学报,2010,34(1):18-23.[10] 黄真,刘婧芳,李艳文.论机构自由度[M].科学出版社,2011.[11] CAMMARATA A. Optimized design of a large-workspace 2-DOF parallel robot for solar tracking systems[J]. Mechanism & Machine Theory, 2015, 83:175-186.[12] 韩方元.并联机器人运动学正解新算法及工作空间本体研究[D].长春:吉林大学机械科学与工程学院,2011.[13] HAY A M, SNYMAN J A. A multi-level optimization methodology for determiningthe dextrous workspaces of planar parallel manipulators[J]. Structural & Multidisciplinary Optimization, 2005, 30(30):422-427.[14] 黄秀琴,辛秀梅,沈惠平,等.一种新型3自由度并联机构的设计和运动学分析[J].机械设计,2010,27(7):4-6.[15] 陈伟海,徐颖俊,王建华,等.并联式下肢康复外骨骼运动学及工作空间分析[J].机械工程学报,2015,51(13):158-166.。
(一)六自由运动平台介绍六自由度液压平台技术参数六自由度运动平台是由六支油缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六只油缸的伸缩运动,完成上平台在空间六个自由度(α,β,γ, X,Y,Z)的运动,从而可以模拟出各种空间运动姿态。
六自由度运动平台涉及到机械、液压、电气、控制、计算机、传感器,空间运动数学模型、实时信号传输处理等一系列高科技领域,因此六自由度运动平台是液压和控制领域水平的标志性象征。
主要包括平台的空间运动机构、空间运动模型、液压系统、控制系统。
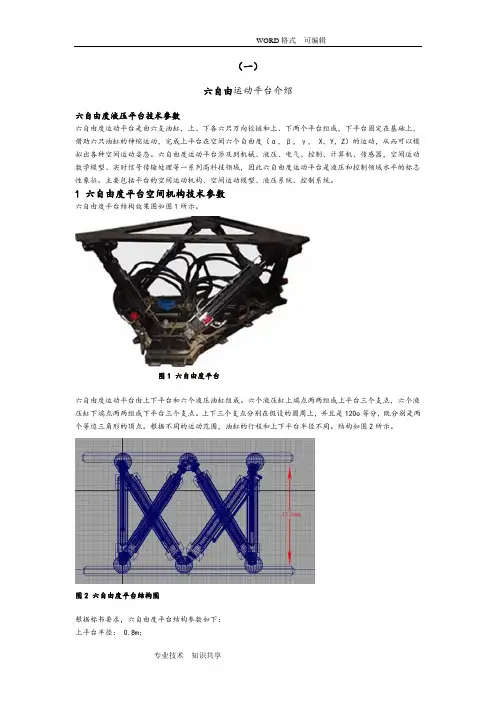
1 六自由度平台空间机构技术参数六自由度平台结构效果图如图1所示。
图1 六自由度平台六自由度运动平台由上下平台和六个液压油缸组成。
六个液压缸上端点两两组成上平台三个支点,六个液压缸下端点两两组成下平台三个支点。
上下三个支点分别在假设的圆周上,并且是120o等分,既分别是两个等边三角形的顶点。
根据不同的运动范围,油缸的行程和上下平台半径不同。
结构如图2所示。
图2 六自由度平台结构图根据标书要求,六自由度平台结构参数如下:上平台半径: 0.8m;下平台半径:0.85m ;油缸最低行程时上下平台垂直距离:约1.17m;油缸行程:±0.20m。
2 六自由度平台空间运动空间运动的目标是实现平台在空间运动的三个姿态角度和三个平动位移,即俯仰、滚转、偏航、上下垂直运动、前后平移和左右平移,及六个姿态的复合运动姿态。
而空间目标是通过六个液压缸的行程实现的,这就需要一个空间的运动模型完成空间运动的转换,假设空间运动的目标俯仰、滚转、偏航、上下垂直位移、前后平移和左右平移用α,β,γ,X,Y,Z表示,六个油缸的行程用L(i)(i=1、2、3、4、5、6)表示。
整个运动模型如下:L(i)=TT(α,β,γ,X,Y,Z)其中,TT是一个空间转换矩阵模型。
由此实时算出每一运动时刻液压油缸的行程。
液压油缸的理论行程再通过D/A接口的转换,给出实际行程值。
直齿轮动力学模型摘要提出一个六自由度非线性时变的直齿轮动力学模型,用以研究对动态响应的影响。
该动态模型结合一种准静态接触模型以齿轮啮合刚度的计算、动态传动误差和动态的轮齿力。
考虑到齿轮副loa&&oloa方向的振动,该动态模型中使用了一种基于混合流体弹性动力润滑构想的新摩擦系数。
最后给出了一些参数的研究,以说明主要齿轮设计、轮齿修形、表面润滑参数对动力学行为的影响。
关键词:齿轮动力,摩擦扰动介绍在混合流体弹性动力润滑(EHL)条件下,粗糙表面复合的滑动和旋转是轮齿接触界面的一个特性。
由于流体切变和实际粗糙面的接触,这样的接触条件会导致滑动方向上的摩擦力。
这些摩擦力导致oloa方向(垂直于loa方向)的激励力,以及旋转方向上的激励力矩。
尽管如此,大多数直齿轮运动模型忽略摩擦。
这些假定允许从loa方向的运动中解耦出oloa方向的振动。
由此,对于oloa方向的运动,所有齿轮的啮合激励都存在摩擦力。
这些模型只关注loa方向的运动。
一些近期直齿轮运动模型考虑了摩擦[5-9]。
这些研究首先用一种干摩擦模型,其中摩擦系数μ是一个用户定义的常数,该常数的符号随相对滑动的方向二改变,即其中Vs为接触点的滑动速率。
干摩擦模型显然是简化的,因为它未考虑很多影响齿轮接触摩擦的参数。
它还必须事先得知。
为了克服这些不足,这些研究还用了更多详细的经验摩擦公式,这些公式都是他人[10-12]基于双盘(twindisk)实验提出的。
这些经验公式考虑了很多参数,如Vs,旋转速率,润滑粘度和接触曲率半径。
这些研究[5-9]虽然能对齿轮副loa-oloa耦合运动建立起基于摩擦力的机制,但却不能分析出齿轮参数、润滑剂及表面材质等对齿轮动力学的影响。
其主要原因在于所用的干摩擦模型及经验公式。
这些模型同它们用到的摩擦公式一样精确。
作为近期齿轮效率研究的一部分,徐某等人[13]明确指出,由于这些公式的应用范围和齿轮对不匹配,故这些公式不适用于齿轮摩擦的建模。

由于六自由度位置姿态调整平台动力学特性和串联机器人是相通的, 所以可以借鉴。
增强型PD控制器,这种控制器是在一个线性PD控制的基础上加上沿期望轨迹计算的名义动力学前馈部分以及一个非线性补偿部分, 它的最大优点是可以根据规划好的期望轨迹离线计算前馈补偿部分, 从而降低实时计算的计算量。
计算力矩控制方法, 它通过计算力矩的方式控制非线性系统沿期望轨迹运动, 如果机器人动力学模型是准确的, 计算力矩控制器可以实现动态解耦, 并得到一个指数稳定的闭环动力方程,从而实现跟踪误差的指数收敛。
在并联机器人的控制策略中,除了常用的PID控制之外,还有自适应控制,滑模变结构控制,鲁棒控制以及智能控制等控制方法。
基于滑模控制的方法在具有不确定性的系统的研究和应用中,滑模控制一直是一个非常有效的控制方法。
滑模控制也叫变结构控制,其本质是一类特殊的非线性控制,且非线性表现为控制的不连续性。
这种控制策略与其他控制的不同之处在于系统的“结构”不是一成不变的,而是可根据系统当前的状态有目的地不断变化。
对于具有信号传输时延的交互控制遥操作系统,也可以应用滑模控制来实现。
只要知道时延大小,滑模控制就可以实现变时延情况下的遥操作系统的稳定控制。
由于滑动模态与系统对象参数及扰动无关,因此滑模控制具有响应快、对应参数变化及扰动不灵敏、无需系统在线辨识、物理实现简单等优点。
鲁棒控制由于遥操作系统中操作对象的不确定性,以及操作任务的实时变化,导致遥操作系统的特性和参数随工作状态和工作环境的变化而变化,这样就无法得到精确的描述遥操作系统特性的数学模型,给控制系统的设计带来困难。
鲁棒控制设计的目标就是在模型不精确和存在其他变化因素的条件下,使系统仍能保持预期的性能。
因此鲁棒控制在遥操作系统中发挥了巨大作用,它较大程度地消除了主观上认识的模型和真实的被控对象之间的误差和不确定性。
基于干扰观测器(DOB)的鲁棒运动控制方法由Ohnishi提出,目前广泛应用于各类电动高精度机械伺服系统" 干扰观测器设计基于被控对象的开环数学模型, 其基本思想是将外部力矩干扰及模型参数变化造成的实际对象与名义模型输出的差异, 统统等效到控制输入端, 即观测出等效干扰, 在控制中引入等量的补偿, 实现对各种干扰的完全抑制, 同时还可以减弱非线性环节对伺服系统性能的影响, 具有很强的鲁棒性。
六自由度地震模拟试验台运动轨迹规划翟华;朱晓锋;丁煦;左根明【摘要】本文以六自由度地震模拟试验台为研究对象,构建了位姿反解模型.提出了一种六自由度地震模拟试验台运动轨迹规划方法,通过位姿反解模型推导出了六自由度地震模拟试验台与手动六自由度平台之间关节空间和工作空间的相似关系.利用相似性关系获得六自由度地震模拟试验台驱动缸的运动方程,实现对手动六自由度平台的运动过程再现.建立了六自由度地震模拟试验台与手动六自由度平台仿真模型,仿真实验结果验证了相似结构六自由度平台之间驱动缸和上平台的运动特性曲线关系.为六自由度地震模拟试验台的控制系统的设计提供参考.%Taking the 6-DOF (6 degrees of freedom) earthquake simulation test bench as the research object,the position inverse solution model has been constructed.A trajectory planning method of 6-DOF earthquake simulation test bench has been put forward.The similarity relationship between joints space and work space among 6-DOF earthquake simulation test bench and manual 6-DOF platform has been derived through the position inverse solution model.The motion equation of driven cylinder for 6-DOF earthquake simulation test bench has been obtained by use of similarity method.The manual 6-DOF platform motion process has been realized again.The simulation models for 6-DOF earthquake simulation test bench and manual 6-DOF platform have been established.The relationship of motion characteristic curve for driven cylinder and the platform between the 6-DOF platforms with similar structure has been verified according tothe simulation and experimental results.It provides reference for the design of control system for 6-DOF earthquake simulation test bench.【期刊名称】《锻压装备与制造技术》【年(卷),期】2017(052)004【总页数】5页(P51-55)【关键词】六自由度平台;轨迹规划;虚拟样机;运动学仿真【作者】翟华;朱晓锋;丁煦;左根明【作者单位】合肥工业大学工业与装备技术研究院,安徽合肥230009;合肥工业大学机械与汽车工程学院,安徽合肥230009;航空结构件成形制造与装备安徽省重点实验室,安徽合肥230009;合肥工业大学工业与装备技术研究院,安徽合肥230009;合肥工业大学工业与装备技术研究院,安徽合肥230009;航空结构件成形制造与装备安徽省重点实验室,安徽合肥230009;安徽新视野科教文化股份有限公司,安徽铜陵244000【正文语种】中文【中图分类】TP242.6地震模拟试验台是依据地震波运动机理,模拟地震时地面的剧烈抖动、摇晃运动形式的专用实验仪器。
自由度,很多统计量的计算公式中都有自由度的概念,可为什么同样是计算标准差,总体标准差的自由度是n,而样本标准差的自由度就是n-1?为什么其它公式中的自由度还有n-2、n-3呢?它到底是什么含意?翻看了以前的教材以及到网上查阅了大量相关资料,原来,不仅仅是统计学里有自由度的概念呀!下面把有关自由度的问题点简要归纳一下。
理论力学:确定物体的位置所需要的独立坐标数称作物体的自由度,当物体受到某些限制时——自由度减少。
一个质点在空间自由运动,它的位置由三个独立坐标就可以确定,所以质点的运动有三个自由度。
假如将质点限制在一个平面或一个曲面上运动,它有两个自由度。
假如将质点限制在一条直线或一条曲线上运动,它只有一个自由度。
刚体在空间的运动既有平动也有转动,其自由度有六个,即三个平动自由度x、y、z和三个转动自由度a、b、q。
如果刚体运动存在某些限制条件,自由度会相应减少。
热力学中:分子运动自由度就是决定一个分子在空间的位置所需要的独立坐标数目。
统计学中:在统计模型中,自由度指样本中可以自由变动的变量的个数,当有约束条件时,自由度减少自由度计算公式:自由度=样本个数-样本数据受约束条件的个数,即df = n - k(df自由度,n样本个数,k约束条件个数)我们当然最关心的还是统计学里面的自由度的概念。
这里自由度的概念是怎么来的呢?据说:一般总体方差(sigma^2),其实它是衡量所有数据对于中心位置(总体平均)平均差异的概念,所以也称为离散程度,通常表示为sum(Xi-Xbar)^1/2/N ,(有多少个数据就除多少)而样本方差(S^2),则是利用样本数据所计算出来估计总体变异用的(样本统计量的基本目的:少量资料估计总体).一般习惯上,总体怎么算,样本就怎么算,可是在统计上估计量(或叫样本统计量)必须符合一个特性--无偏性,也就是估计量的数学期望值要等于被估计的总体参数=> E(S^2)=sigma^2(无偏估计)。
1.1六自由度机械手的简介六自由度机械手是一种能模仿人的某些动作,用以按固定程序抓取、搬运物件或操作工具的自动操作装臵。
广泛应用于机械制造、冶金、电子、轻工和原子能等行业。
六自由度机械手主要由手部和运动机构组成。
手部是用来抓持工件(或工具)的部位,根据被抓持物件的形状、大小、重量、材料和作业要求而量身定做,如夹持型、托持型和吸附型等。
运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位臵。
运动机构的升降、旋转等运动方式,称为机械手的自由度。
为了抓取空间中任意位臵和方位的物体,需有6个自由度。
自由度是机械手设计的关键参数,自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。
一般专用机械手有2~3个自由度即可。
机械手的分类,按驱动方式可分为液压式、气动式、电动式、机械式机械手;按适用范围可分为专用机械手和通用机械手;按运动轨迹控制方式可分为点位控制和连续轨迹控制机械手等。
机械手通常用作其他机器的附加装臵,如在自动机床或自动生产线上装卸和传递工件,在加工中心中更换刀具等,一般没有独立的控制装臵。
不过有些操作装臵需要由人直接操纵,比如用于原子能部门操持危险物品的主从式操作手也可以并且常称为机械手。
1.2六自由度机械手的发展在工业生产中应用的机械手被称为工业机械手。
工业机械手是近代自动控制领域中出现的一项新技术,并已成为现代机械制造生产系统中的一个重要组成部分,这种新技术发展很快,逐渐成为一门新兴的学科——机械手工程。
机械手涉及到力学、机械学、电器液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。
工业机械手正在向着高速度、高精度、高可靠性、便于操作和维修等性能提高,而价格却像其他电子类产品一样再不断下降。
机械结构向模块化、可重构化发展。
例如关节模块中的伺服电机、减速机、检测系统三位一体化:由关节模块、连杆模块用重组方式构造机器人整机,国外已有模块化装配机器人产品问市。