高精度解耦六自由度机械臂逆运动学解法
- 格式:pdf
- 大小:913.38 KB
- 文档页数:5
六自由度机器人逆向运动学解题过程
六自由度机器人逆向运动学主要是通过求解机器人末端执行器的位姿,从而得到关节的角度。
逆向运动学求解的过程如下:
1. 了解机器人运动学模型:首先需要了解六自由度机器人的运动学模型,包括机器人臂部的结构、关节类型和运动学参数。
常见的运动学模型有DH(Denavit-Hartenberg)模型和旋量法。
2. 建立运动学方程:根据机器人臂部的结构,建立运动学方程。
对于DH模型,运动学方程为:
θ1 * A1 + θ2 * A2 + θ3 * A3 + θ4 * A4 + θ5 * A5 + θ6 * A6 = T
其中,θ1-θ6为六个关节的角度,A1-A6为相邻两个关节之间的变换矩阵。
3. 初始化关节角度:给定一个初始的关节角度序列,作为求解逆向运动学的输入。
4. 求解位姿:利用运动学方程,将关节角度序列代入,计算出末端
执行器的位姿。
5. 评价求解结果:根据实际应用需求,评价求解结果的精度和实用性。
如果结果不满足要求,可以调整初始关节角度序列,重复步骤2-4,直至得到满意的解。
6. 应用:将求解得到的关节角度序列应用于机器人控制系统,实现机器人的运动。
在求解过程中,可以使用一些优化算法,如牛顿法、梯度下降法等,以提高求解速度和精度。
同时,为了减少计算复杂度,可以采用一些技巧,如LU分解、QR分解等。
需要注意的是,六自由度机器人逆向运动学求解过程依赖于机器人运动学模型的精确性、运动学方程的稳定性和求解算法的性能。
在实际应用中,可能需要根据具体情况调整模型和算法,以获得更优的求解结果。
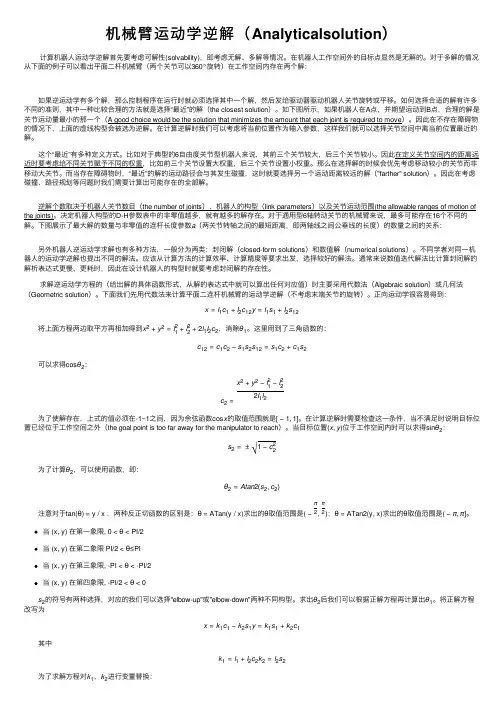
机械臂运动学逆解(Analyticalsolution) 计算机器⼈运动学逆解⾸先要考虑可解性(solvability),即考虑⽆解、多解等情况。
在机器⼈⼯作空间外的⽬标点显然是⽆解的。
对于多解的情况从下⾯的例⼦可以看出平⾯⼆杆机械臂(两个关节可以360°旋转)在⼯作空间内存在两个解: 如果逆运动学有多个解,那么控制程序在运⾏时就必须选择其中⼀个解,然后发给驱动器驱动机器⼈关节旋转或平移。
如何选择合适的解有许多不同的准则,其中⼀种⽐较合理的⽅法就是选择“最近”的解(the closest solution)。
如下图所⽰,如果机器⼈在A点,并期望运动到B点,合理的解是关节运动量最⼩的那⼀个(A good choice would be the solution that minimizes the amount that each joint is required to move)。
因此在不存在障碍物的情况下,上⾯的虚线构型会被选为逆解。
在计算逆解时我们可以考虑将当前位置作为输⼊参数,这样我们就可以选择关节空间中离当前位置最近的解。
这个“最近”有多种定义⽅式。
⽐如对于典型的6⾃由度关节型机器⼈来说,其前三个关节较⼤,后三个关节较⼩。
因此在定义关节空间内的距离远近时要考虑给不同关节赋予不同的权重,⽐如前三个关节设置⼤权重,后三个关节设置⼩权重。
那么在选择解的时候会优先考虑移动较⼩的关节⽽⾮移动⼤关节。
⽽当存在障碍物时,“最近”的解的运动路径会与其发⽣碰撞,这时就要选择另⼀个运动距离较远的解("farther" solution)。
因此在考虑碰撞、路径规划等问题时我们需要计算出可能存在的全部解。
逆解个数取决于机器⼈关节数⽬(the number of joints)、机器⼈的构型(link parameters)以及关节运动范围(the allowable ranges of motion of the joints)。

6关节串联结构机械臂逆解计算流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor.I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!6关节串联结构机械臂逆解计算流程详解在机器人学中,机械臂的逆解计算是一项关键的技术,它涉及到将目标位置和姿态转化为各个关节的角度,这对于控制具有多个自由度的机械臂至关重要。
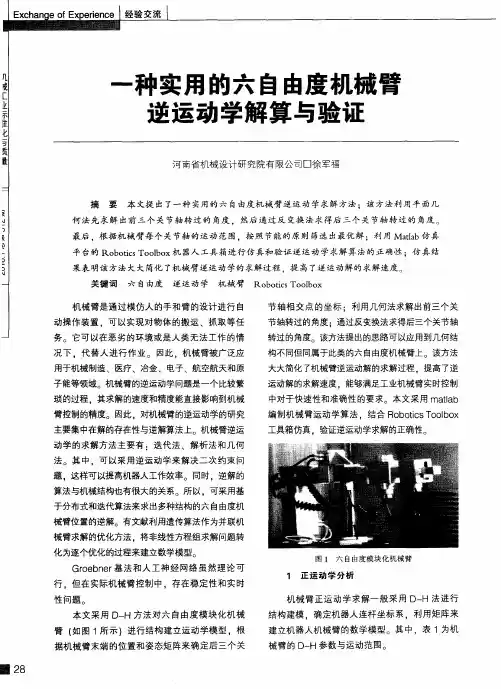
六自由度机械臂逆运动学求解作者:李顺治齐鹏王凯来源:《科技风》2019年第07期摘要:进行了六自由度机械手的正运动学分析和求解,提出了一套求解六自由度机械手逆运动学问题的算法,可以最大限度地降低能耗。
首先,根据机械臂的结构特点,建立D-H坐标系,得到正向运动学模型。
然后,通过对正向运动学模型可解性的分析,通过矩阵逆乘法得到机械臂逆运动学的完整解析解。
然后,采用计算极值的方法用于计算机械臂的运动轨迹的最小能耗。
最后,采用实例验证了正向运动学模型和反向运动学解决方案的正确性。
关键词:六自由度机械臂;正运动学;逆运动学1 概述我国每年的收成耗费大量劳动力,机械臂已经成为取代人类工作的好工具。
机械手是一种设计用于模仿人体手臂的装置,可以自动移动。
它用于抓取和收获,可以取代人类无法工作的环境中的人类工作,并可以确保稳定性,在提高生产效率和降低劳动力成本方面发挥了非常重要的作用,目前已被应用于各个领域。
6自由度机械手的逆运动学问题是近年来国内外研究的热点之一。
逆运动学解决方案的难点与机械手的结构直接相关。
许多学者为六自由度机械手的逆运动学解决方案做出了巨大贡献。
在求解逆运动学问题时,迭代方法只能找到一组解;分析方法可以得到所有解,但计算复杂;人工神经网络,遗传方法等仅在理论上进行了研究,不能保证解的精度和稳定性,很少用于机械手的运动控制。
本文提出了一种实时算法来解决六自由度机械手的逆运動学问题。
在分析机械手运动特性的基础上,建立了D-H坐标系,研究机械手的运动学问题。
首先建立了机械手的正运动学模型,然后通过矩阵逆乘法求解逆运动学问题。
最后,通过仿真实验验证了机械手的正运动学模型和逆运动学解的正确性。
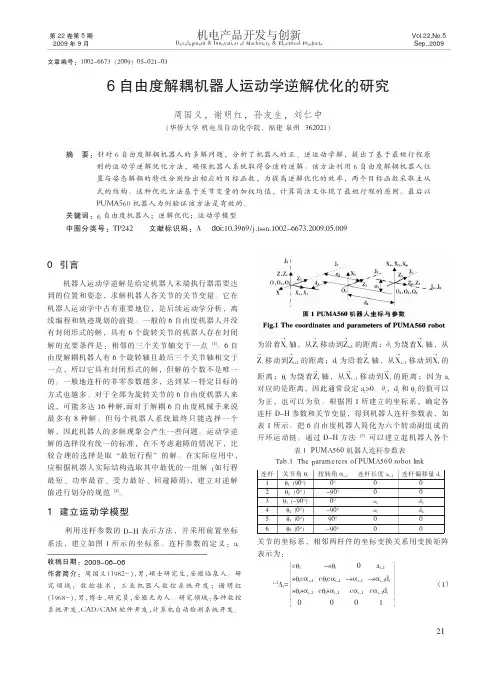
2 正运动学模型机械手的正向运动学解决方案是通过主要使用D-H坐标系统知道操纵器的每个关节的角度来获得操纵器的端部操纵器的期望位置。
总的思路是:首先,在每个关节中建立参考坐标系;然后确定每两个相邻坐标系之间的关系;最后,获得机械臂的总变换矩阵。
六自由度解耦机械臂的逆运动学通解袁得春【摘要】In order to solve the general solution of inverse kinematics of the six degree-of-freedom ( 6DOF) decoupling manipula-tor, a decomposed position-orientation method based on Euclid Norm was presented.Firstly, the analytical solution of first three joint angles was deduced to calculate the wrist position of manipulator quickly and precisely.Secondly, the last three joint angles were solved by known executor'' s orientation.By the inverse kinematic simulative simulation of the 6DOF ma-nipulator, the effectiveness of method was verified.%为求解六自由度解耦机械臂逆运动学通解,提出一种基于欧几里得范数的位姿分解逆运动学求解方法.先推导前3个关节角的解析解,快速、准确的获取机械臂的腕心位置;再利用已知的执行器姿态,计算后3个关节角,经六自由度机械臂的正逆运动学仿真互验,验证了方法的有效性.【期刊名称】《东北林业大学学报》【年(卷),期】2017(045)012【总页数】5页(P88-92)【关键词】六自由度;解耦机械臂;逆运动学通解【作者】袁得春【作者单位】东北林业大学,哈尔滨,150040【正文语种】中文【中图分类】TH132.4;O311六自由度解耦机械臂是工业中常见的机械臂。