电子凸轮与飞剪
- 格式:pdf
- 大小:299.50 KB
- 文档页数:7
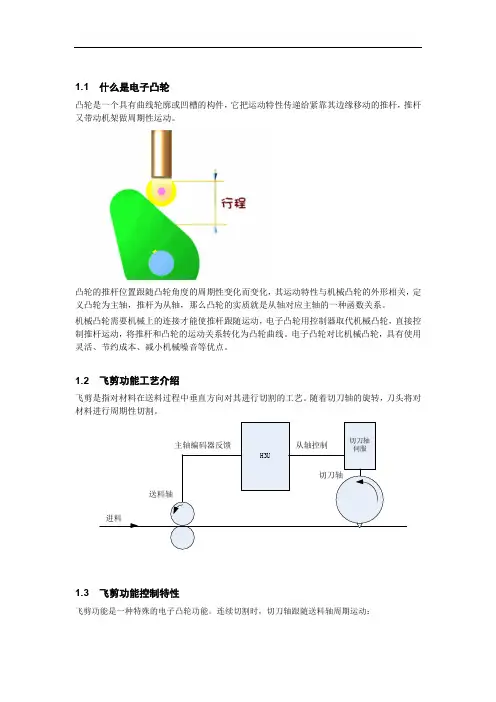
1.1 什么是电子凸轮凸轮是一个具有曲线轮廓或凹槽的构件,它把运动特性传递给紧靠其边缘移动的推杆,推杆又带动机架做周期性运动。
凸轮的推杆位置跟随凸轮角度的周期性变化而变化,其运动特性与机械凸轮的外形相关,定义凸轮为主轴,推杆为从轴,那么凸轮的实质就是从轴对应主轴的一种函数关系。
机械凸轮需要机械上的连接才能使推杆跟随运动,电子凸轮用控制器取代机械凸轮,直接控制推杆运动,将推杆和凸轮的运动关系转化为凸轮曲线。
电子凸轮对比机械凸轮,具有使用灵活、节约成本、减小机械噪音等优点。
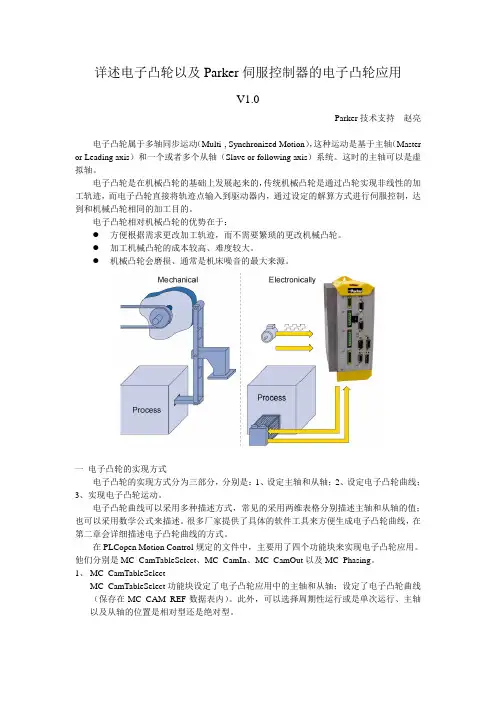
1.2 飞剪功能工艺介绍飞剪是指对材料在送料过程中垂直方向对其进行切割的工艺。
随着切刀轴的旋转,刀头将对材料进行周期性切割。
1.3 飞剪功能控制特性飞剪功能是一种特殊的电子凸轮功能。
连续切割时,切刀轴跟随送料轴周期运动:在每个运动周期内,切刀轴跟随送料轴运动关系可以分为同步区和调整区。
同步区:此时送料轴与切刀轴按固定的速度比例运转(刀头的线速度与切割面的线速度相等), 材料的切割发生在同步区内。
调整区:由于切割长度不同,需要做相应的位移调整。
根据切割长度调整区可以分为下面三种情况。
短料剪切:剪切长度小于切刀轴刀头外缘周长。
短料剪切时,切刀轴必须在调整区内先加速,然后再减速到同步速度。
等料剪切:剪切长度等于切刀轴刀头外缘周长。
此情况下,同步区与非同步区送料轴和切刀轴一直保持速度同步。
长料剪切:剪切长度大于切刀轴刀头外缘周长。
此情况下,切刀轴应该在调整区内先减速,然后再加速到同步速度。
如果剪切长度远大于切刀轴刀头外缘周长,则切刀辊有可能减速到零,停留一段时间,然后再加速到同步速度。
剪切长度越长,停留的时间越长。
切刀轴位置短料剪切等料剪切长料剪切切刀轴位置切刀轴位置送料轴位置1.4 飞剪工艺参数1订单管理L 材料的剪切长度(mm)切刀轴设置D1 切刀轴有效直径(mm)N 切刀个数θ1同步区角度(度)K 飞剪补偿系数P1 切刀轴每转脉冲数θ2 停留角度送料轴设置D2 送料轴直径P2 送料轴每转脉冲数K2 起点速度同步区速度的百分比短料或停留角度为0时有效1、主轴长度:Lπ×D2×P22、关键点短料剪切关键点数据:短料剪切条件:L≤ ×M-Pos(主轴位置)S-Pos(从轴位置)Type(曲线类型)关键点1 0(不可更改)0(不可更改)NA(不可设置)关键点2(12−θ1720)×Lπ×D2×P2(12N−θ1×L720×π×D1)×P1SpLine关键点3(12+θ1720)×Lπ×D2×P2(12N+θ1×L720×π×D1)×P1×KLine关键点4 Lπ×D2×P2P1NSpLine长料剪切关键点数据:长料剪切条件:L> ×M-Pos(主轴位置)S-Pos(从轴位置)Type 关键点1 0(不可更改)0(不可更改)NA关键点2 θ2×L720×π×D2×P20 Line关键点3(12−θ1720)×Lπ×D2×P2(12N−θ1×L720×π×D1)×P1SpLine关键点4(12+θ1720)×Lπ×D2×P2(12N+θ1×L720×π×D1)×P1×KLine关键点5 (720−θ2)×L720×π×D2×P2P1NSpLine关键点6 Lπ×D2×P2P1NLine当θ2=0时,删除关键点2和5。
详述电子凸轮以及Parker伺服控制器的电子凸轮应用V1.0Parker技术支持—赵亮电子凸轮属于多轴同步运动(Multi-, Synchronized Motion),这种运动是基于主轴(Master or Leading axis)和一个或者多个从轴(Slave or following axis)系统。
这时的主轴可以是虚拟轴。
电子凸轮是在机械凸轮的基础上发展起来的,传统机械凸轮是通过凸轮实现非线性的加工轨迹,而电子凸轮直接将轨迹点输入到驱动器内,通过设定的解算方式进行伺服控制,达到和机械凸轮相同的加工目的。
电子凸轮相对机械凸轮的优势在于:z方便根据需求更改加工轨迹,而不需要繁琐的更改机械凸轮。
z加工机械凸轮的成本较高、难度较大。
z机械凸轮会磨损、通常是机床噪音的最大来源。
一电子凸轮的实现方式电子凸轮的实现方式分为三部分,分别是:1、设定主轴和从轴;2、设定电子凸轮曲线;3、实现电子凸轮运动。
电子凸轮曲线可以采用多种描述方式,常见的采用两维表格分别描述主轴和从轴的值;也可以采用数学公式来描述。
很多厂家提供了具体的软件工具来方便生成电子凸轮曲线,在第二章会详细描述电子凸轮曲线的方式。
在PLCopen Motion Control规定的文件中,主要用了四个功能块来实现电子凸轮应用。
他们分别是MC_CamTableSelect、MC_CamIn、MC_CamOut以及MC_Phasing。
1、MC_CamTableSelectMC_CamTableSelect功能块设定了电子凸轮应用中的主轴和从轴;设定了电子凸轮曲线(保存在MC_CAM_REF数据表内)。
此外,可以选择周期性运行或是单次运行、主轴以及从轴的位置是相对型还是绝对型。
2、MC_CamInMC_CamIn功能块用于进行电子凸轮主轴和从轴的耦合。
当Execute为True时,主轴和从轴按照设定的电子凸轮曲线以及设定的运行参数进行耦合。
这些运行参数包含主轴和从轴的比例:主轴和从轴可以根据此设定来决定两者的位置比例。
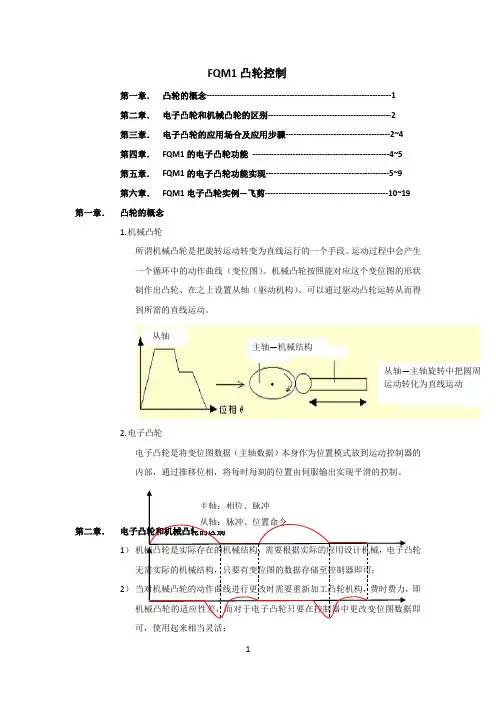
FQM1凸轮控制第一章. 凸轮的概念---------------------------------------------------------------------1 第二章. 电子凸轮和机械凸轮的区别----------------------------------------------2 第三章. 电子凸轮的应用场合及应用步骤---------------------------------------2~4 第四章. FQM1的电子凸轮功能 ---------------------------------------------------4~5 第五章. FQM1的电子凸轮功能实现----------------------------------------------5~9 第六章. FQM1电子凸轮实例—飞剪----------------------------------------------10~19 第一章.凸轮的概念 1. 机械凸轮 所谓机械凸轮是把旋转运动转变为直线运行的一个手段。
运动过程中会产生一个循环中的动作曲线(变位图)。
机械凸轮按照能对应这个变位图的形状制作出凸轮、在之上设置从轴(驱动机构)、可以通过驱动凸轮运转从而得到所需的直线运动。
2. 电子凸轮 电子凸轮是将变位图数据(主轴数据)本身作为位置模式放到运动控制器的内部,通过推移位相,将每时每刻的位置由伺服输出实现平滑的控制。
第二章.1) 2) 即可,使用起来相当灵活;从轴 主轴—机械结构 从轴—主轴旋转中把圆周运动转化为直线运动3)机械凸轮由于是机械联结的,所以长时间运行会出现磨损而导致精度降低,而电子凸轮由于主从轴之间无实际联结所以不存在这样的问题。
4)除上述比较外,机械凸轮还存在以下的一些缺点:复杂程度高,运行过程噪声大,机械性能的可量测性较差,无法预判机器性能,而与之相反的是电子凸轮使用灵活,运行稳定,无需经常维护,且性能可保证。

目录凸轮及同步控制指导说明 (3)1 凸轮简介 (3)1.1 1.2 凸轮基本原理 (3)了解机械参数 (4)2 三种基本模式 (6)2.1 2.2 2.3旋切/飞剪 (6)2.1.1 试运行 (9)显示 (14)配置功能 (15)2.1.22.1.3追剪 (31)2.2.1 试运行 (32)显示 (37)配置功能 (38)2.2.22.2.3通用凸轮 (50)2.3.1 界面介绍 (50)试运行 (53)配置功能 (55)2.3.22.3.33 4 5 故障处理 (58)常见问题 (59)功能码 (60)龙门同步控制说明 (69)1 2 3 4 5 6 基本原理 (69)系统配线图 (69)参数的设定 (71)对位回零方式 (73)后台监控通道 (75)步骤 (75)凸轮及同步控制指导说明1凸轮简介本说明书介绍了如何正确使用汇川电子凸轮专用伺服驱动器。
在使用(安装、运行、维护、检查等)前,请务必认真阅读本说明书。
另外,请在理解产品的特性后再使用该产品。
本产品的主要特点有:(1)伺服驱动器与运动控制器结合为一体化控制器。
(2)使用高精度电子凸轮生成运动轨迹,速度、加速度曲线都平滑变化,使电机的速度指令、转矩指令没有阶跃变化,可以大幅度减小机械缓冲。
(3)支持自由曲线规划、同步旋切、自动追剪、等电子凸轮功能。
(4)可跟踪标点位置(色标、孔位及凸点等)实时调节进行剪切。
可用于印刷纸、包装袋等需要补偿印刷/位置偏差的剪切。
(5)支持相位调整功能。
可用于医用卫生纸等没有色标但需要补偿位置偏差的剪切。
(6)支持Modbus、与PLC,HMI等通讯,实时修改凸轮数据、方便灵活使用。
(7)剪切长度范围可达到65535.000mm,设定可精确至um单位。
(8)可包含人性化的订单自动切换功能。
(9)自由曲线规划功能,大容量EEPROM可使设置的点数多达272个。
(10)人性化的图形规划界面、自由上传、下载的功能使用户在使用时更加形象、具体、方便。
目录凸轮及同步控制指导说明 (3)1 凸轮简介 (3)1.1 凸轮基本原理 (3)1.2 了解机械参数 (4)2 三种基本模式 (6)2.1 旋切/飞剪 (6)2.1.1 试运行 (9)2.1.2 显示 (14)2.1.3 配置功能 (15)2.2 追剪 (31)2.2.1 试运行 (32)2.2.2 显示 (37)2.2.3 配置功能 (38)2.3 通用凸轮 (50)2.3.1 界面介绍 (50)2.3.2 试运行 (53)2.3.3 配置功能 (55)3 故障处理 (58)4 常见问题 (59)5 功能码 (60)龙门同步控制说明 (69)1 基本原理 (69)2 系统配线图 (69)3 参数的设定 (71)4 对位回零方式 (73)5 后台监控通道 (75)6 步骤 (75)凸轮及同步控制指导说明1凸轮简介本说明书介绍了如何正确使用汇川电子凸轮专用伺服驱动器。
在使用(安装、运行、维护、检查等)前,请务必认真阅读本说明书。
另外,请在理解产品的特性后再使用该产品。
本产品的主要特点有:(1)伺服驱动器与运动控制器结合为一体化控制器。
(2)使用高精度电子凸轮生成运动轨迹,速度、加速度曲线都平滑变化,使电机的速度指令、转矩指令没有阶跃变化,可以大幅度减小机械缓冲。
(3)支持自由曲线规划、同步旋切、自动追剪、等电子凸轮功能。
(4)可跟踪标点位置(色标、孔位及凸点等)实时调节进行剪切。
可用于印刷纸、包装袋等需要补偿印刷/位置偏差的剪切。
(5)支持相位调整功能。
可用于医用卫生纸等没有色标但需要补偿位置偏差的剪切。
(6)支持Modbus、与PLC,HMI等通讯,实时修改凸轮数据、方便灵活使用。
(7)剪切长度范围可达到65535.000mm,设定可精确至um单位。
(8)可包含人性化的订单自动切换功能。
(9)自由曲线规划功能,大容量EEPROM可使设置的点数多达272个。
(10)人性化的图形规划界面、自由上传、下载的功能使用户在使用时更加形象、具体、方便。
NJ追剪与飞剪区别及实现方法共通技术名称:NJ追剪与飞剪区别及实现方法目的:使用NJ完成追剪、飞剪功能实验时间:12-09-28系统配置:NJ501-1500试验箱NJ是欧姆龙新一代高功能PLC,内置有完善的运动控制功能,本文主要介绍了自己使用NJ 实现追剪与飞剪的方法,提供给大家以作参考。
首先介绍追剪与飞剪的定义以及区别方法。
1、飞剪:剪切机构一般为圆周运动,与被剪切物体同向运动,通过改变剪切机构运行中的速度,达到改变剪切长度的目的。
2、追剪:剪切机构平行于被剪切物体,剪切机构做往复运动,通过改变在非同步区的速度达到改变剪切长度的目的。
共同点:飞剪与追剪都分为非同步区与同步区的概念,要求同步区剪切机构与被剪切机构速度相同。
不同点:飞剪是圆周运动,同步区小,但是可以做高速运动。
追剪是往复运动,同步区大,可以完成较为复杂的剪切、冲压等动作。
一、实现内容使用NJ实现追剪与飞剪功能。
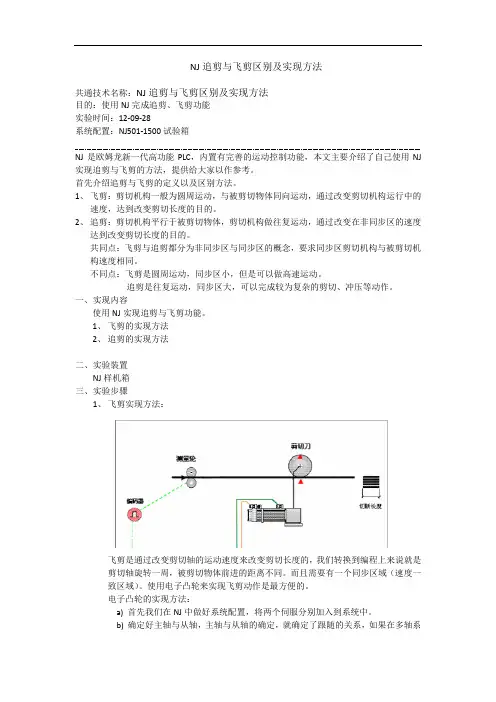
1、飞剪的实现方法2、追剪的实现方法二、实验装置NJ样机箱三、实验步骤1、飞剪实现方法:飞剪是通过改变剪切轴的运动速度来改变剪切长度的,我们转换到编程上来说就是剪切轴旋转一周,被剪切物体前进的距离不同。
而且需要有一个同步区域(速度一致区域)。
使用电子凸轮来实现飞剪动作是最方便的。
电子凸轮的实现方法:a)首先我们在NJ中做好系统配置,将两个伺服分别加入到系统中。
b)确定好主轴与从轴,主轴与从轴的确定,就确定了跟随的关系,如果在多轴系统中,需要仔细确认,因为剪切轴需要根据被剪切轴的速度来运行,所以我们设定被剪切轴为主轴,剪切轴为从轴。
电子凸轮功能实现的要求:主轴要求从0开始,从小到大排列,不能有重复数据。
从轴要求从0开始,数据排列无要求。
根据以上两点,我们可以看出,无法直接使用被剪切轴作为主轴来使用,我们添加一个虚轴来代替被剪切轴使用。
c)虚轴:虚轴设定为0-360的环形计数模式,虚轴旋转一周,剪切轴完成一次剪切动作,两轴之间做电子凸轮运动d)被剪切轴:被剪切轴与主轴之间使用电子齿轮功能,通过修改电子齿轮比来修改被剪切轴的速度,也就修改了裁切的长度。

电子凸轮追剪计算公式电子凸轮追剪计算公式是指在机械设计中,用于计算电子凸轮追剪的相关参数的数学公式。
电子凸轮追剪是一种常见的机械运动方式,它通过凸轮的运动来驱动其他机械部件的运动,广泛应用于各种机械设备中。
在设计和制造机械设备时,需要通过计算公式来确定凸轮的相关参数,以保证机械设备的正常运行。
电子凸轮追剪计算公式通常涉及到凸轮的几何形状、工作角度、运动速度等参数。
在实际应用中,根据不同的凸轮设计和工作要求,需要使用不同的计算公式来确定凸轮的相关参数。
下面将介绍几种常见的电子凸轮追剪计算公式。
1. 凸轮的基本几何形状计算公式。
在设计凸轮时,首先需要确定凸轮的基本几何形状,包括凸轮的轮廓形状、凸轮的半径、凸轮的高度等。
这些参数可以通过以下公式来计算:凸轮的轮廓形状:C(t) = (x(t), y(t))。
其中,C(t)表示凸轮的轮廓形状,t表示凸轮的工作角度。
通过这个公式可以计算出凸轮在不同工作角度下的轮廓形状。
凸轮的半径:r(t) = √[x(t)² + y(t)²]通过这个公式可以计算出凸轮在不同工作角度下的半径。
凸轮的高度:h(t) = y(t) + r(t)。
通过这个公式可以计算出凸轮在不同工作角度下的高度。
2. 凸轮的运动速度计算公式。
在实际应用中,凸轮的运动速度对机械设备的运行效率和稳定性有着重要的影响。
因此,需要通过以下公式来计算凸轮的运动速度:凸轮的角速度:ω(t) = dθ/dt。
其中,ω(t)表示凸轮的角速度,dθ表示凸轮的角位移,dt表示时间。
通过这个公式可以计算出凸轮在不同工作角度下的角速度。
凸轮的线速度:v(t) = r(t) ω(t)。
其中,v(t)表示凸轮的线速度,r(t)表示凸轮的半径,ω(t)表示凸轮的角速度。
通过这个公式可以计算出凸轮在不同工作角度下的线速度。
3. 凸轮追剪运动参数计算公式。
在实际应用中,需要通过凸轮的追剪运动参数来确定其他机械部件的运动。
![电子凸轮介绍[优质PPT]](https://uimg.taocdn.com/56e0dd523968011ca2009137.webp)
NJ电子凸轮应用资料欧姆龙自动化(中国)有限公司FAE中心2012年12月目录一、杭州中亚电子凸轮应用介绍(江勇) (1)二、上海今昌电子凸轮应用介绍(王琦) (10)三、南京先特电子凸轮应用介绍(杨伟) (15)四、厦门特盈电子凸轮应用介绍(吴晓东) (20)五、温州鸿昌电子凸轮应用介绍(王伟) (29)一、杭州中亚直线灌装机电子凸轮应用介绍课题一:多轴时序控制1.课题:客户有如下图示的控制要求,各个轴之间存在复杂的时序控制。
时序图2.解决方法:通过将时序图转换成电子凸轮表解决复杂的时序控制3.设置及程序以“进瓶水平”(MC_BottleInHorizontal)为例,主轴为虚轴,从轴为实轴。
时序图如下:主轴(虚轴)以360为一个周期,进行循环速度控制。
主轴、从轴都在零位。
从轴开始的时候并不启动,而是在主轴位置到达285时开始启动,当主轴位置到达360时,从轴停止。
在下一个周期,主轴到达120的时候,从轴开始返回(反转),主轴位置到达220的时候,从轴停止(回零位)。
如上图所示,是进瓶水平轴与主轴构成的电子凸轮表。
根据上图可以看到,主轴为0的时候,从轴也是0,而根据时序图的要求,从轴的“0”应该在主轴的“285”。
显然这样的动作是不正确的。
这样编制凸轮表的原因在于,NJ的电子凸轮表的起始点必须为两个“0”,即主轴、从轴都从0开始,如下图所示:解决这个问题的办法是对编制好的凸轮表进行“偏移”,偏移的程序如下:通过MasterOffset将主轴向后偏移280,这时的动作时序和凸轮形状就与工艺要求相符了,但要注意的是,这时的从轴起始位置不为0,会造成起始速度“无穷大”,从而引发伺服报警。
将MasterScaling设置为280,就可以将从轴的起始点推迟到“主轴280”的位置,当主轴启动时,从轴并不启动,而是等到主轴到达280位置时再启动,这样就可以实现客户的工艺要求了。
4.注意问题a.因为虚轴是从0开始,但是虚轴在从0开始时,不是所有的轴对应的时序图都在0位,因此需要调整某个轴的电子凸轮表同步启动点,我们可以通过设置CAMIN功能块里的Masterstartdistance来实现;b.NJ电子凸轮表制作时只能从(0,0)点开始画,而实际如“进瓶水平”轴,主轴在280的时候才是一个周期的起点,我们可以通过设置CAMIN功能块里的Masteroffset来实现;c.在设置主虚轴加减速率时,要考虑每个从轴的机械惯量;c.在设置主虚轴速度时,请注意各个从轴的实际速度,防止超速运行。
NJ电子凸轮表的平移共通技术客户名称:杭州中亚机械有限公司项目名称:16轴直线罐装机FAE部门:行业应用技术部SE人员:王琦营业/代理店对应人员:余盛客户对应人员:胡明伟一、什么是“电子凸轮”“电子凸轮”是NJ系列产品的一项非常重要的功能。
电子凸轮能够实现的功能很多,例如:“追剪”、“飞剪”功能,多轴时序控制功能,甚至还包括一般同步功能(等分凸轮表,即可实现位置同步)。
NJ的电子凸轮表包含一个主轴和一个从轴,主轴通常可以任意动作,而从轴则根据主轴所到达的不同位置,描绘出自己的位置点,从而形成了一条横坐标为主轴位置,纵坐标为从轴位置的运动曲线。
下面例举一个电子凸轮表:分析一下这张电子凸轮表:主轴为0时,从轴也为0,这说明主、从轴都位于原点。
主轴为25时,从轴为35,这说明主轴从0走到25,从轴从0走到35。
主轴为120时,从轴为35,说明主轴从25走到120,而从轴不动。
主轴为175时,从轴为294,说明主轴从120走到175,从轴从35走到294。
主轴为240时,从轴为294,说明主轴从175走到240时,从轴不动。
主轴为310时,从轴为0,说明主轴从240走到310,从轴从294返回到0。
主轴为360时,从轴为0,说明主轴从310走到360时,从轴不动。
以上就是这张电子凸轮表的含义。
二、为什么要“偏移”电子凸轮如图所示,NJ的电子凸轮表起始点固定为0.000与0.000,不可修改。
对于伺服轴来讲,0意味着原点,这种情况适用于主轴在原点时,从轴也在原点。
但有的时候,根据客户的工艺要求,主轴在原点时,需要从轴已经具有一定的位置。
图中红色向上箭头的位置是从轴原点的位置,此时主轴位置为240。
而当主轴在原点时,从轴经历了“下移抓瓶”动作,已经具有一定的位置(工艺要求是35)。
根据工艺要求,正确的电子凸轮表应该是这样:主轴从轴035(第一次下移位置)55294(第二次下移位置)120294190024002653536035表一三、如何“偏移”凸轮表如果凸轮表可以如表一这样绘制,只需要将从轴的启动位置推迟到绿色部分即可。
伺服的电子凸轮有什么?如何使用?动画展示“追剪、飞剪”!技成培训▲ 图1平皮带传动发生相位偏移如果只是单纯用来传输动力(例如引擎中的发电机皮带),相位的偏移并无关系;但若作为同步的控制(例如引擎中控制汽门,曲轴与点火时机的皮带),就会发生问题!以机构而言,要避免相位偏移,可以把一般的皮带换成正时皮带(Timing Belt)跟齿轮!如下图所示,即使长时间运转,主/从轴的相位都能维持一致!就是彼此达到同步状态!▲ 图2正时皮带可维持相位同步讲了这么多,终于可以进入正题了!如果把上述的机械传动改成伺服的电子凸轮,效果会是如何呢?如下图三,我们将皮带拆除,用编码器采集主轴的位置,以A/B相脉波的方式传给伺服,伺服以直线的电子凸轮来驱动从轴做跟随:▲ 图3将皮带传动改成伺服电子凸轮-发生偏移实测结果发现,相位发生了偏移,因为编码器的脉波受到干扰,而且会随时间累积,造成偏移愈趋明显!而脉波干扰是很难完全抑制的,在工厂多变的环境下,不论配线如何讲究,脉波偏差总会发生,只是时间早晚的问题!因此,单纯以编码器脉波驱动电子凸轮,无法达到正时皮带的同步效果,顶多是平皮带的效果而已!那么该怎么改善呢?其实我们可以效仿正时皮带,因为它是带"齿"的,所以不会滑动造成累积误差!那我们就用一个假想的"齿"来模仿它!并把齿的宽度(就是齿与齿的距离)定义清楚,这样就可以造出一个虚拟的正时皮带,就是所谓的”同步轴”!这个"齿"可以用主轴上任何一个周期性出现的信号(或编码器的Z)来表示,如下图:▲ 图4使用同步轴-避免相位偏移在主轴上安装一个标记当作"齿",并用感测器将信号读进伺服的DI,再根据编码器的型号得知主轴转一圈应该会有R个脉波。
由于一圈只有一个齿,所以齿的宽度就是R(单位是主轴的脉波)。
如此,只要伺服每感测到一个"齿",就知道应该要收到R个脉波,如果数量不对,就可加以补偿,让脉波总数一直跟齿数维持正确的关系,如此便可让主/从轴的相位永不偏移,保持同步!这功能在台达ASD-A2 与 ASD-M-R伺服里都已具备,在凸轮的主轴来源 P5-88.Y里,选择实体脉波相当于使用平皮带;选用同步轴就相当于使用正时皮带,非常方便!设定方式请参考 A2凸轮同步轴的设定方法!注:克服凸轮主轴脉波漏失还有其他方法,例如:1、采用虚拟主轴不会漏脉波,但是主轴也必须使用伺服马达,无法采用一般马达外加编码器的方式!2、利用凸轮对位虽然可以做到,但通常会保留给从轴的修正使用,因为从轴的误差补偿会用到!▲ 追剪功能▲ 飞剪功能。
NJ追剪与飞剪区别及实现方法共通技术名称:NJ追剪与飞剪区别及实现方法目的:使用NJ完成追剪、飞剪功能实验时间:12-09-28系统配置:NJ501-1500试验箱NJ是欧姆龙新一代高功能PLC,内置有完善的运动控制功能,本文主要介绍了自己使用NJ 实现追剪与飞剪的方法,提供给大家以作参考。
首先介绍追剪与飞剪的定义以及区别方法。
1、飞剪:剪切机构一般为圆周运动,与被剪切物体同向运动,通过改变剪切机构运行中的速度,达到改变剪切长度的目的。
2、追剪:剪切机构平行于被剪切物体,剪切机构做往复运动,通过改变在非同步区的速度达到改变剪切长度的目的。
共同点:飞剪与追剪都分为非同步区与同步区的概念,要求同步区剪切机构与被剪切机构速度相同。
不同点:飞剪是圆周运动,同步区小,但是可以做高速运动。
追剪是往复运动,同步区大,可以完成较为复杂的剪切、冲压等动作。
一、实现内容使用NJ实现追剪与飞剪功能。
1、飞剪的实现方法2、追剪的实现方法二、实验装置NJ样机箱三、实验步骤1、飞剪实现方法:飞剪是通过改变剪切轴的运动速度来改变剪切长度的,我们转换到编程上来说就是剪切轴旋转一周,被剪切物体前进的距离不同。
而且需要有一个同步区域(速度一致区域)。
使用电子凸轮来实现飞剪动作是最方便的。
电子凸轮的实现方法:a)首先我们在NJ中做好系统配置,将两个伺服分别加入到系统中。
b)确定好主轴与从轴,主轴与从轴的确定,就确定了跟随的关系,如果在多轴系统中,需要仔细确认,因为剪切轴需要根据被剪切轴的速度来运行,所以我们设定被剪切轴为主轴,剪切轴为从轴。
电子凸轮功能实现的要求:●主轴要求从0开始,从小到大排列,不能有重复数据。
●从轴要求从0开始,数据排列无要求。
根据以上两点,我们可以看出,无法直接使用被剪切轴作为主轴来使用,我们添加一个虚轴来代替被剪切轴使用。
c)虚轴:虚轴设定为0-360的环形计数模式,虚轴旋转一周,剪切轴完成一次剪切动作,两轴之间做电子凸轮运动d)被剪切轴:被剪切轴与主轴之间使用电子齿轮功能,通过修改电子齿轮比来修改被剪切轴的速度,也就修改了裁切的长度。