伺服系统之电子凸轮比系统组成
- 格式:doc
- 大小:17.50 KB
- 文档页数:4
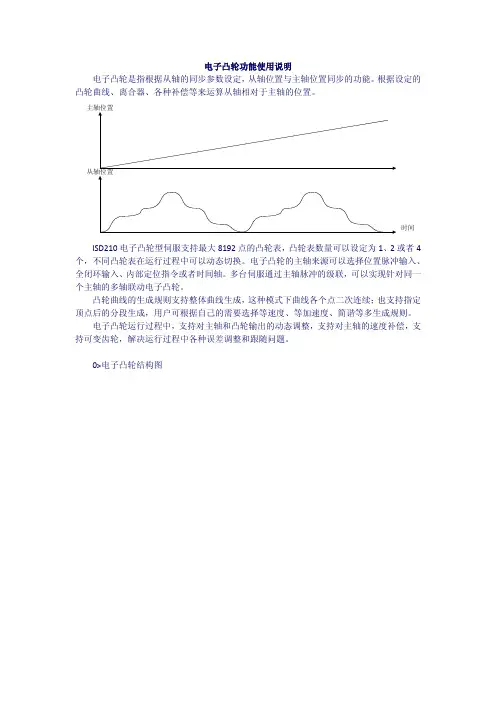
电子凸轮功能使用说明电子凸轮是指根据从轴的同步参数设定,从轴位置与主轴位置同步的功能。
根据设定的凸轮曲线、离合器、各种补偿等来运算从轴相对于主轴的位置。
时间ISD210电子凸轮型伺服支持最大8192点的凸轮表,凸轮表数量可以设定为1、2或者4个,不同凸轮表在运行过程中可以动态切换。
电子凸轮的主轴来源可以选择位置脉冲输入、全闭环输入、内部定位指令或者时间轴。
多台伺服通过主轴脉冲的级联,可以实现针对同一个主轴的多轴联动电子凸轮。
凸轮曲线的生成规则支持整体曲线生成,这种模式下曲线各个点二次连续;也支持指定顶点后的分段生成,用户可根据自己的需要选择等速度、等加速度、简谐等多生成规则。
电子凸轮运行过程中,支持对主轴和凸轮输出的动态调整,支持对主轴的速度补偿,支持可变齿轮,解决运行过程中各种误差调整和跟随问题。
0>电子凸轮结构图1>全局开关Pn[837] 电子凸轮开关电子凸轮开关Pn[837]电子凸轮使能开关0‐不使能1‐使能只有凸轮开关使能时,才能使用电子凸轮的各项功能。
凸轮开关关闭时,当前主轴位置、当前凸轮相位将被复位。
2>主轴Pn[838] 主轴来源选择Pn[839] 时间轴周期脉冲量Pn[840]、Pn[841] 当前主轴位置主轴来源选择Pn[838]选择电子凸轮的主轴0‐位置指令脉冲,可以来自低速脉冲口,也可以来自高速脉冲口,由参数Pn[407]‐Pn[416]配置1‐全闭环口脉冲,可以来自CN6上的全闭环脉冲,RS422电平标准,AB相2‐定位指令,可以来自PLC内部定位指令,主轴来源选择定位指令时,电子凸轮的输出位置调整功能无效3‐时间轴 ,可以来自时间轴,参考Pn[839]时间轴周期脉冲量Pn[839]主轴来源选择时间轴时,设定每0.5mS主轴的位置增量‐32768~32767当前主轴位置Pn[840]、Pn[841]反映凸轮使能后主轴的位置,‐2147483648~2147483647,超出范围后循环。

NJ电子凸轮培训资料欧姆龙自动化(中国)有限公司FAE中心2015年7月目录一、凸轮概述 (2)1、机械凸轮组成结构 (2)2、机械凸轮的实现 (2)3、电子凸轮的实现 (6)二、NJ的凸轮指令和凸轮表 (8)1、NJ的凸轮指令 (8)2、其它凸轮相关指令 (18)3、NJ的凸轮表的设定 (21)三、凸轮计算应用实现 (24)1、包封机变袋长凸轮计算实现 (24)2、枕包机变袋长凸轮计算实现 (26)①设备要求 (26)②解决方法 (28)③设置及程序 (33)3、枕包机变袋长凸轮三次方优化实现 (33)①飞剪功能实现 (33)②凸轮曲线的三次方优化 (35)③调试经验 (37)4、色标补偿计算实现 (37)①产生偏差的原因 (37)②如何实现“纠偏”程序 (38)凸轮概述1、机械凸轮组成结构机械凸轮机构一般是由凸轮、从动件和机架三个构件组成的高副机构。
凸轮通常作连续等速转动,从动件根据使用要求设计使它获得一定规律的运动。
凸轮机构能实现复杂的运动要求,广泛用于各种自动化和半自动化机械装置中。
固定机架从动件凸轮凸轮结构示意图2、机械凸轮的实现机械凸轮是一个具有曲线轮廓或凹槽的构件。
一般可分为三类:盘形凸轮:凸轮为绕固定轴线转动且有变化直径的盘形构件;如下图这是凸轮的基本形式,凸轮绕固定轴旋转时,推杆(从动件)的位移规律是一定的。
移动凸轮:凸轮相对机架作直线移动;如下图从动件一般做成杆状,接触凸轮的部分装有滚轮,在凸轮上做纯滚动,从而带动从动杆移动。
它可视为盘型凸轮的演化形式。
圆柱凸轮:凸轮是圆柱体,可以看成是将移动凸轮卷成一圆柱体。
凸轮是圆柱体,可以看成是将移动凸轮卷成一个圆柱体。
圆柱凸轮不再做往复直线移动,而是做旋转移动。
前两种都可以看成平面运动形式,而圆柱凸轮则是一种空间运动形式。
机械凸轮从动件(推杆)一般具有3种不同形状。
尖顶从动件构造简单,尖顶能与任意复杂凸轮轮廓保持接触,但易于磨损,所以只适用于作用力不大和速度不高的场合。
电子凸轮原理与应用2010-01-28 18:15机械凸轮机械凸轮是一种角度感应和控制装置,通过在金属盘片上加工出一定形状的轮廓曲线,使其在某个位置可以有效的使与之接近的微动开关产生动作-导通或截止,如图所示。
凸轮盘可以组合使用,将多个凸轮串联可以实现关联控制。
用户可以按控制要求设置凸轮片间的间隔角度和凸轮盘个数,从而达到角度感应和多点输出控制的目的。
如图所示,凸轮盘串接在同一根轴上,并且凸轮间以一定的角度相间隔,在微动开关的一端接+5V,连续转动轴,在开关的另一端可以得到变化的电平输出。
用机械凸轮可以完成一些简单的控制和角度感应,可以实现粗略定位。
盘片的加工和维修复杂,而且易磨损,制作困难。
电子凸轮电子凸轮又称Electronic CAM,是模拟机械凸轮的一种智能控制器。
它通过位置传感器(如旋转变压器Resolver或编码器Encoder等)将位置信息反馈给CPU,CPU将接收到的位置信号进行解码、运算处理,并按设定要求在指定位置将电平信号进行设置并输出。
电子凸轮和系统组成下图为电子凸轮和系统图。
该型号采用旋变作为位置传感器,可以通过通讯端口和PC或手持编程器(Handy terminal)进行通信。
PC和手持编程器提供给用户编程使用,为用户提供了方便的编程界面。
信号输出采用并行(PIO)和串行(SIO)两种方式,输出信号可以直接用来控制伺服电机和步进电机的驱动器,也可以通过控制器将信号集中处理后控制变频器等驱动装置,实现运动控制的目的。
输出设置电子凸轮的输出是以DOG为单位进行设置的,如图4所示。
一个DOG分为DOG WIDTH和DOG INTERVAL两部分,DOGWIDTH相当于机械凸轮中开关被压下并保持的时间或角度范围,需设置一个起始角度(Start position)ON(比如图中的0°)和一个终止角度(End position)OFF(比如图中的30°)。
相应的DOGINTERVAL就是相当于开关松开的角度范围。
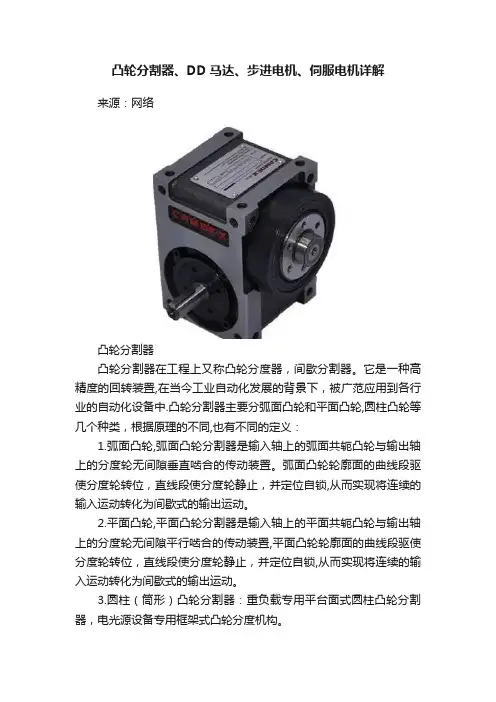
凸轮分割器、DD马达、步进电机、伺服电机详解来源:网络凸轮分割器凸轮分割器在工程上又称凸轮分度器,间歇分割器。
它是一种高精度的回转装置,在当今工业自动化发展的背景下,被广范应用到各行业的自动化设备中.凸轮分割器主要分弧面凸轮和平面凸轮,圆柱凸轮等几个种类,根据原理的不同,也有不同的定义:1.弧面凸轮,弧面凸轮分割器是输入轴上的弧面共轭凸轮与输出轴上的分度轮无间隙垂直啮合的传动装置。
弧面凸轮轮廓面的曲线段驱使分度轮转位,直线段使分度轮静止,并定位自锁,从而实现将连续的输入运动转化为间歇式的输出运动。
2.平面凸轮,平面凸轮分割器是输入轴上的平面共轭凸轮与输出轴上的分度轮无间隙平行啮合的传动装置,平面凸轮轮廓面的曲线段驱使分度轮转位,直线段使分度轮静止,并定位自锁,从而实现将连续的输入运动转化为间歇式的输出运动。
3.圆柱(筒形)凸轮分割器:重负载专用平台面式圆柱凸轮分割器,电光源设备专用框架式凸轮分度机构。
4.各种特形、端面凸轮,包括心轴型分割器(DS):输出轴为心轴,适用于间歇传送输送带、齿轮啮合等机构动力来源。
法兰型分割器(DF):输出轴外形为一凸缘法兰。
适用于重负荷的回转盘固定及各圆盘加工机械。
中空法兰型分割器(DFH):输出轴外形为凸缘法兰并且为轴中间为空心。
适用于配电、配管通过。
平台桌面型凸轮分割器(DT):能够承受大的负载及垂直径向压力,在其输出轴端有一凸起固定盘面及大孔,径空心轴,更好的满足了客户要求中心静止的需求。
超薄平台桌面型凸轮分割器(DA):同于平台桌面型,适用于负载大但体积受到限制的条件下。
平行凸轮分度机构(MRP):能实现小分度(一分度至八分度)大步距输出。
特别适用于要求在一个周期内停歇次数较少的场合,如各种纸盒模切机,果奶果冻灌装成型机等。
重负载专用型凸轮分度机构(MRY):能实现多分度(4分度至200分度)分。
特别适用于要求重负载的场合,如各类玻璃机械、电光源设备等。
公众号《机械工程文萃》,工程师的加油站!DD马达DD马达DD马达中的DD是direct driver的简称,后面加上马达就称为直接驱动马达。
电子凸轮原理
电子凸轮是一种用于控制发动机气门活动的技术,通过电子信号来替代传统的机械凸轮轴。
其工作原理基于发动机控制单元(ECU)的指令,通过调节发动机气门开启和关闭的时间、持续
时间和升程来改变气门的工作方式。
电子凸轮系统由电子控制单元、传感器和执行器组成。
传感器监测发动机的速度、负载、温度等参数,并向电子控制单元提供反馈信息。
电子控制单元根据这些信息和预设的程序算法来确定每个气门的开启和关闭时机。
执行器则负责控制进气和排气凸轮的运动。
在正常工作条件下,电子凸轮的工作过程如下:当ECU接收
到油门输入信号后,根据发动机的工作状态来计算出最佳的气门开启和关闭时机。
然后,电子控制单元通过发送电信号来激活执行器,执行器会根据电信号的指令来控制凸轮的转动。
这样,气门就会按照预设的时间和升程来开启和关闭,从而实现精确的气门控制。
电子凸轮的优点是可以实现更准确的气门控制,提高发动机的燃烧效率和动力性能。
此外,电子凸轮还可以根据不同驾驶要求和环境条件来进行调整,提供更好的驾驶体验和燃油经济性。
另外,由于电子凸轮无需机械传动,可以减少发动机的摩擦损失,提高机械效率。
尽管电子凸轮具有许多优点,但其成本较高,对传感器和执行器的要求也较高。
此外,电子凸轮系统也需要更复杂的控制算
法和更高的可靠性要求。
因此,在实际应用中,电子凸轮系统仍然面临一些挑战和问题需要解决。
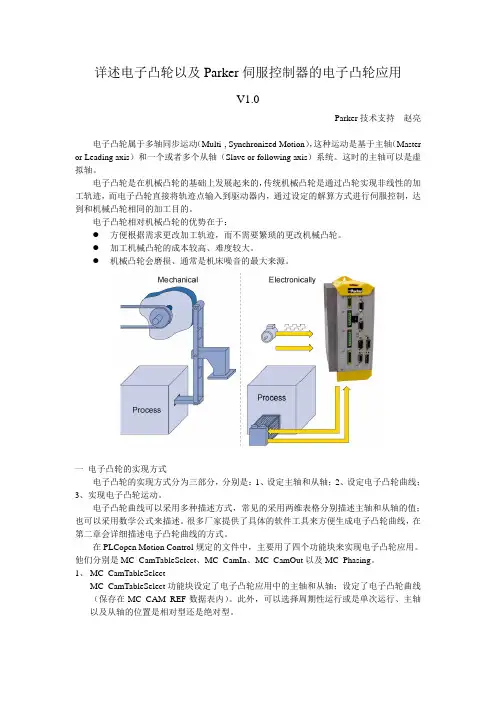
详述电子凸轮以及Parker伺服控制器的电子凸轮应用V1.0Parker技术支持—赵亮电子凸轮属于多轴同步运动(Multi-, Synchronized Motion),这种运动是基于主轴(Master or Leading axis)和一个或者多个从轴(Slave or following axis)系统。
这时的主轴可以是虚拟轴。
电子凸轮是在机械凸轮的基础上发展起来的,传统机械凸轮是通过凸轮实现非线性的加工轨迹,而电子凸轮直接将轨迹点输入到驱动器内,通过设定的解算方式进行伺服控制,达到和机械凸轮相同的加工目的。
电子凸轮相对机械凸轮的优势在于:z方便根据需求更改加工轨迹,而不需要繁琐的更改机械凸轮。
z加工机械凸轮的成本较高、难度较大。
z机械凸轮会磨损、通常是机床噪音的最大来源。
一电子凸轮的实现方式电子凸轮的实现方式分为三部分,分别是:1、设定主轴和从轴;2、设定电子凸轮曲线;3、实现电子凸轮运动。
电子凸轮曲线可以采用多种描述方式,常见的采用两维表格分别描述主轴和从轴的值;也可以采用数学公式来描述。
很多厂家提供了具体的软件工具来方便生成电子凸轮曲线,在第二章会详细描述电子凸轮曲线的方式。
在PLCopen Motion Control规定的文件中,主要用了四个功能块来实现电子凸轮应用。
他们分别是MC_CamTableSelect、MC_CamIn、MC_CamOut以及MC_Phasing。
1、MC_CamTableSelectMC_CamTableSelect功能块设定了电子凸轮应用中的主轴和从轴;设定了电子凸轮曲线(保存在MC_CAM_REF数据表内)。
此外,可以选择周期性运行或是单次运行、主轴以及从轴的位置是相对型还是绝对型。
2、MC_CamInMC_CamIn功能块用于进行电子凸轮主轴和从轴的耦合。
当Execute为True时,主轴和从轴按照设定的电子凸轮曲线以及设定的运行参数进行耦合。
这些运行参数包含主轴和从轴的比例:主轴和从轴可以根据此设定来决定两者的位置比例。

电子凸轮工作原理-标准化文件发布号:(9556-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII电子凸轮电子凸轮电子凸轮又称Electronic CAM,是模拟机械凸轮的一种智能控制器。
它通过位置传感器(如旋转变压器Resolver或编码器Encod)将位置信息反馈给CPU,CPU将接收到的位置信号进行解码、运算处理,并按设定要求在指定位置将电平信号进行设置并输出。
电机——编码器——cpu ——伺服电机或步进电机驱动器电子凸轮和系统组成:(编码器+通讯端口+PC+伺服电机或步进电机)下图为电子凸轮和系统图。
该型号采用旋变作为位置传感器,可以通过通讯端口和PC或手持编程器(Handy termin al)进行通信。
PC 和手持编程器提供给用户编程使用,为用户提供了方便的编程界面。
信号输出采用并行(PIO)和串行(SIO)两种方式,输出信号可以直接用来控制伺服电机和步进电机的驱动器(),也可以通过控制器将信号集中处理后控制变频器等驱动装置,实现运动控制的目的。
输出设置 DOG是什么电子凸轮的输出是以DOG为单位进行设置的,如图4所示。
一个DOG 分为DOG WIDTH和DOG INTERVAL两部分,DOGWIDTH相当于机械凸轮中开关被压下并保持的时间或角度范围,(啥概念)需设置一个起始角度(Start position)ON(比如图中的0°)和一个终止角度(End position)OFF(比如图中的30°)。
相应的DOGINTERVAL 就是相当于开关松开的角度范围。
对于一个凸轮来讲,可以有多个DOG,通常只需设置DOG WIDTH,DOG Interval就是在两个DOG WIDTH中间的角度范围,不需另外设置。
以下图为例,只需设置0°——ON,30°——OFF;57°——ON,95°——OFF即可。
一般可以设定的DOG数和SENSOR 的转速有关,转速越高,可以设定的DOG就越少,相反转速越低,可设定DOG数越多。
电子凸轮控制器的原理及应用1. 引言电子凸轮控制器是一种用于控制发动机气门运动的装置,它通过控制凸轮轴的转速和轴的位置,使得气门在适当的时机打开和关闭,以调节气门的开启和关闭时间,从而实现对发动机运行的控制。
本文将介绍电子凸轮控制器的基本原理以及应用领域。
2. 基本原理电子凸轮控制器的基本工作原理是通过一个电机或伺服马达来控制凸轮轴的转动,进而控制气门的运动。
其中,凸轮轴上装有凸轮,凸轮的形状决定了气门的开启和关闭时间。
电子凸轮控制器通过控制凸轮轴的位置和转速来实现气门的控制。
电子凸轮控制器通常包括以下几个关键组件:1.电机或伺服马达:负责驱动凸轮轴的转动。
2.位置传感器:用于监测凸轮轴的位置,以提供准确的控制信号。
3.控制单元:处理来自位置传感器的信号,并生成相应的控制指令。
4.执行机构:根据控制指令控制凸轮轴的转动。
通过控制凸轮轴的位置和转速,电子凸轮控制器能够精确地控制气门的开闭时间,从而实现对发动机性能的调节。
通过合理地控制气门的开闭时间,可以优化燃烧过程,提高发动机的效率和动力性能。
3. 应用领域电子凸轮控制器在汽车和摩托车等内燃机平台上有广泛的应用。
以下是一些应用领域的列举:•发动机控制系统:电子凸轮控制器是现代发动机控制系统中不可或缺的组成部分。
它能够精确控制气门的开闭时间,从而提高发动机的燃烧效率和动力性能。
•可变气门正时系统:电子凸轮控制器可以与可变气门正时系统(VVT)结合使用,实现对气门正时的精确控制。
通过调节气门正时,可以在不同工况下优化发动机的燃烧效率和动力输出。
•气缸关闭技术:电子凸轮控制器可以与气缸关闭技术(Cylinder Deactivation)结合使用,实现在低负荷工况下关闭部分气缸,从而节省燃油。
通过控制气门的开启和关闭时间,可以实现气缸的即时关闭和启用。
•发动机启停系统:电子凸轮控制器可以与发动机启停系统结合使用,实现发动机的快速启动和停止。
通过控制凸轮轴的转动,可以实现快速启动和停止发动机,从而减少燃油消耗和排放。
机械电气设备开放式数控系统第2部分:体系结构1 范围本文件规定了开放式数控系统的基本体系结构,定义了体系结构中各个功能组件及其主要功能模块。
本文件只规定开放式数控系统的控制器规范,不对驱动器的类型、性能和由最终用户开发的软件作限制。
本文件不对操作系统和通信系统作具体规定,凡是采用符合事实标准,国际流行,技术成熟的操作系统和通信系统(包括PC的通信系统)都被视为符合本文件。
本文件对于控制器的外部接口只规定采用国际标准或事实标准,不作具体限制。
本文件只定义最基础的模块及其功能,在实际使用中可扩充。
本文件适用于机械电气设备用的开放式数控系统。
2 规范性引用文件下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。
其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
本文件没有规范性引用文件。
3 术语和定义下列术语和定义适用于本文件。
功能区 functional area用来解释数值控制系统的传统观念和开放式数控(ONC)系统概念之间的关系。
一个ONC控制器的功能可以划分成若干功能区。
基本功能区有下列三个:——HMC 人机交互控制功能区;——PLC 可编程逻辑功能区;——NC 数值控制功能区。
功能模块 function module是功能组件中的基础单元,用来实现功能组件中各功能的模块,它是一个独立的功能块,具有标准的数据接口。
一个功能组件可以选配和连接不同的功能模块实现不同的功能水准。
模块可以通过系统配置直接嵌入ONC平台,并被通信系统访问。
用户在对模块进行开发时,对外接口应符合所属模块的数据接口定义,以便实现“即插即用”,其内部实现被封装,并允许加许可证。
功能组件 functional componentONC控制器的独立组成部分,实现一类独立的功能。
功能组件划分一般如图1所示:图1 基本功能区及其中的基本功能组件注1:NIC为网络接口与通信协议组件,实现设备间的互联互通,HMI为人机接口组件,Config为系统配置组件。
凸轮机构的组成和功用1. 引言凸轮机构是一种常见的机械传动装置,由凸轮、从动件和驱动件组成。
它通过凸轮的回转运动,驱动从动件进行往复或旋转运动,广泛应用于各个领域,如汽车发动机、工业机械等。
本文将从凸轮的定义、组成结构和功用三个方面对凸轮机构进行详细介绍。
2. 凸轮的定义凸轮是一种具有特殊形状的旋转零件,通常为圆柱体或圆盘状。
它在周向上具有不规则的突起部分,称为凸起或凸面。
凸轮通常由高强度材料制成,以保证其在高速旋转时能够承受较大的载荷。
3. 凸轮机构的组成凸轮机构主要由以下三部分组成:3.1 凸轮凸轮是凸轮机构的核心部分,它通过旋转运动驱动从动件进行相应的运动。
根据需要,凸轮可以具有不同形状和尺寸,例如圆形、椭圆形、心形等。
凸轮的凸起部分决定了从动件的运动规律。
3.2 从动件从动件是凸轮机构中被凸轮驱动的部分,它通过与凸轮的接触,实现往复或旋转运动。
常见的从动件有凸轮追踪器和摇杆。
凸轮追踪器是一种与凸轮接触并沿其周向移动的装置,它将凸轮的旋转运动转换为直线或曲线运动。
摇杆是一种通过与凸轮接触并绕固定点旋转的装置,它将凸轮的旋转运动转换为角度变化。
3.3 驱动件驱动件是凸轮机构中提供能量输入和控制机构运行的部分。
它通常由电机或其他能源驱动,通过传递力或扭矩给凸轮,使其能够进行旋转运动。
驱动件还可以包括传感器、控制系统等辅助装置,用于监测和控制整个机构的运行状态。
4. 凸轮机构的功用凸轮机构具有多种功用,主要包括以下几个方面:4.1 运动传递凸轮机构通过凸轮的旋转运动,将驱动件提供的能量传递给从动件,使其进行相应的往复或旋转运动。
通过合理设计凸轮的形状和从动件的结构,可以实现各种复杂的运动规律,满足不同工作场景的需求。
4.2 动力放大凸轮机构可以将驱动件提供的较小力或扭矩放大到较大力或扭矩,以满足工作过程中对力或扭矩的要求。
这种放大效应是通过凸轮与从动件之间的接触和运动传递实现的。
4.3 运动控制凸轮机构可以通过调整凸轮形状和从动件结构来实现对机构运动规律的控制。
伺服系统之电子凸轮比系统组成
本文首先介绍了伺服系统的结构组成及工作原理,其次介绍了电子凸轮的结构框图及系统组成,最后介绍了电子凸轮的伺服实现以及应用,具体的跟随小编来详细的了解一下。
伺服系统的结构组成从基本结构来看,伺服系统主要由三部分组成:控制器、功率驱动装置、反馈装置和电动机(图1)。
控制器按照数控系统的给定值和通过反馈装置检测的实际运行值的差,调节控制量;功率驱动装置作为系统的主回路,一方面按控制量的大小将电网中的电能作用到电动机之上,调节电动机转矩的大小,另一方面按电动机的要求把恒压恒频的电网供电转换为电动机所需的交流电或直流电;电动机则按供电大小拖动机械运转。
图1中的主要成分变化多样,其中任何部分的变化都可构成不同种类的伺服系统。
如根据驱动电动机的类型,可将其分为直流伺服和交流伺服;根据控制器实现方法的不同,可将其分为模拟伺服和数字伺服;根据控制器中闭环的多少,可将其分为开环控制系统、单环控制系统、双环控制系统和多环控制系统。
伺服系统的工作原理伺服系统是使物体的位置、方位、状态等输出被控量能够跟随输入目标的任意变化而变化的自动控制系统,即伺服系统是具有反馈的闭环自动控制系统。
它由计算机数字控制系统、伺服驱动器、伺服电动机、速度和位置传感器等组成。
计算机数字控制系统用来存储零件加工程序,根据编码器反馈回来的信息进行各种插补运算和软件实时控制,向各坐标轴的伺服驱动系统发出各种控制命令。
伺服驱动器和伺服电动机接收到计算机数字控制系统的控制命令后,对功率进行放大、变换与调控等处理,能够快速平滑调节运动速度,并能够精确地进行位置控制。
电子凸轮系统结构图
电子凸轮系统组成该型号采用旋变作为位置传感器,可以通过通讯端口和PC或手持编程器(Handy terminal)进行通信。
PC和手持编程器提供给用户编程使用,为用户提供了方。