施耐德运动控制概述motion_guide
- 格式:doc
- 大小:2.47 MB
- 文档页数:33
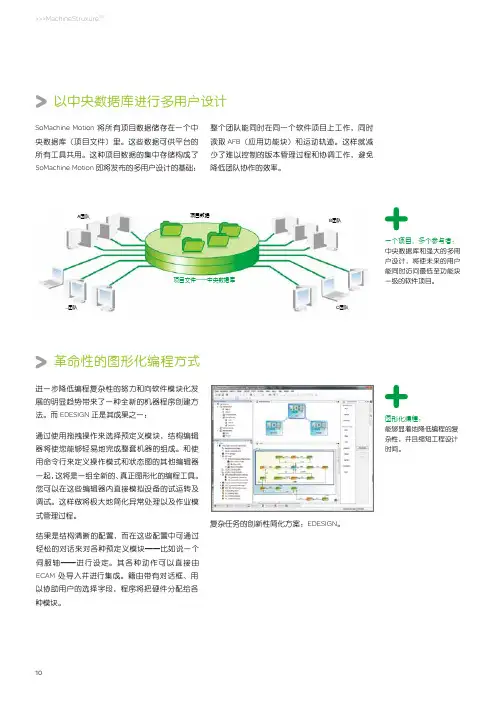
第六章. 运动控制6.1 运动控制的定义6.2 运动控制的组成6.2.1 同步伺服电机6.2.2 步进电机6.2.3 驱动器6.2.4 控制器6.3 运动控制系统的结构6.4 运动控制要解决的问题6.5 伺服电机的选型计算6.6 典型应用6.1 运动控制的定义运动控制是指动作的单元以非常精确的设定速度在规定时间到达准确位置的可控运动. 运动单元的运动有如下特点:路径: 有一个初始位置有一个终点位置稳定的速度和上升,下降斜率动作: 静态和动态响应非常精确运动响应很快运动很稳定位置: 有绝对位置有相对位置根据不同的应用工艺, 我们把运动分为有限轴运动和无限轴运动.有限轴运动是指运动体的运动在一定范围内, 如机械手的运动在设计范围内抓取工件. 无限轴运动是指运动体连续不断的向一个方向运动,没有边界. 如传送带的运动.6.2 运动控制的组成运动控制的组成离不开以下4个单元,如图:运动控制器: 控制运动按照设定的轨迹动作,不断计算位置和速度的匹配驱动器: 把普通电能转化为向电机提供运动的动力电机: 产生对负载推动的扭矩位置传感器: 提供电机轴实时的位置和速度所以, 运动控制要完成可控的动作, 主要对3个变量进行控制.即: 电机的力矩, 速度, 位置如图所示6.2.1 同步伺服电机首先让我们看一下运动控制中的执行器: 伺服电机电机是把电枢电流转化为电机轴输出力矩的一种装置.从技术角度, 我们通常把电机分为异步电机, 同步电机和步进电机. 从运动形式来分,可分为旋转电机和直线电机。
如图所示:在运动控制系统中,用到的电机通常为同步无刷电机。
6.2.1.2 无刷伺服电机的工作原理:集成有位置编码器的电机(位置测量),其转子是永久磁铁, 定子是与异步电机一样的线圈绕组.当定子线圈通上交变电流, 就会在转子周围产生旋转磁场,而转子的磁场就会与定子产生的磁场相互作用, 驱动器根据位置反馈情况, 来调整定子磁场,使转子磁场与定子磁场成90度角,使力矩最大.同时,位置传感器测量出电机轴的旋转角度. 这里,转子的磁场是恒定的(由永久磁铁产生). 而定子的磁场是变化的, 它取决于通到线圈绕组电流的变化频率. 这样转子的转动就跟随着定子的旋转磁场一起运动. 即转子与旋转磁场同步.集成的位置传感器一般为电压分解器形式, 耐用且够一定精度.6.2.1.3 同步伺服电机的特性电机的输出力矩与定子电流( Is )成正比T=C1x Is C1: 为常数电机的转速与定子电流的频率(Freq.Is)成正比S=C2 x Freq.Is C2: 为常数电机在一定重量下,力矩的大小取决于转子的磁性材料的特性,如磁性材料为钕铁硼,或钐钴等.从上式可以看出, 磁通量越大, 轴输出力矩也越大.力矩/速度曲线,电机与驱动器组合通过力矩/速度曲线, 我们可以看出无刷伺服电机,有着低速高转矩,高过载力矩的特性.因此,这种电机能够胜任高精度,高动态响应的运动任务.6.2.2 步进电机.步进电机原理: 步进电机的定子是带有若干对磁极的永久磁铁. 定子是至少有两相绕组的线圈. 当一个绕组线圈通电时,产生磁场,转子被吸到一个磁极, 当另一个绕组通电时,产生另一个磁场,把转子吸到另一个磁极, 就这样定子线圈分步通电, 转子就被吸着一步一步转动了. (如图所示)所以,步进电机不需要位置反馈. 运动方式是开环的.6.2.3 位置传感器位置传感器集成在电机轴上,用来反馈电机旋转的位置和速度.通常有3种位置传感器1.电压分解器型2.增量编码器型3.绝对编码器型位置传感器的特性由3个参数来定义, 这3个参数是:分辨率, 精度和一致性分辨率是指测量一个位置的最小单元. 通常是一转多少脉冲。


施耐德运动控制器与伺服驱动器及伺服电机简述:目前我公司所用施耐德系列的元器件比较广泛,除了低压电器及接近开关、控制部分的有PLC,运动控制器、伺服驱动器、触摸屏系列都有应用。
其中,洗瓶机上所有的为小型PLC,烘箱上所使用的为中型PLC,软袋线上所用的为中大型PLC及运动控制器、灌装机上使用的为运动控制器。
洗瓶机,烘干机程序相对来说较简单,机型较稳定,我司已经形成统一的程序;软袋线程序复杂,但研发周期较长,程序非常稳定并得到国外厂商的一致认可;KGS的机型很多,程序版本从09年开始,处于不断完善的过程,目前已按照系列有标准化的程序版本;拉丝灌封机型也较多,去年又重新研发了带扇形结构的新机型;程序版本在11年上半年之前没统一,11年下半年,由我司牵头,施耐德公司配合,将部分带扇形的机型程序按KGS功能块的模式标准化;灌装机所使用的绝大部分为运动控制器,运动控制器的型号为LMC20,伺服驱动器的型号为LXM32系列和LXM05系列,伺服驱动器与伺服电机的连接是通过动力线及编码器线两根线连接,两端的接头均为快接方式,需要电工连接及稳固;从程序开发来讲,我司大部分设计人员已掌握施耐德系统的程序开发,调试及处理常见问题。
从服务部反馈的问题来看,大部分的不稳定的因素,均在于现场的干扰或是线本身的连接问题(主要体现在编码器线报警),对于施耐德品牌来说,因为是欧系的品牌,相对来说,对现场整体的要求比较高,需要正规化的配线和走线工艺流程来控制,而这点恰恰是我们公司所欠缺的。
目前我们部门在这个方面进行改革,我相信,改良后的接线工艺会带来很大的改善;同时需要督促供应商提高对线的连接检测。
控制器的基本参数:扫描周期为1~20ms可调,我们大部分的程序设置为4ms;(由于施耐德系统提供的是整个程序的扫描参数,需要根据具体程序量来核算扫描周期)通讯方式为Canopen方式,通讯速率为1M;伺服系统分辨率为17位,编码器系统为绝对值编码器,断电记忆位置;编程软件平台为Codesys,为欧系品牌的标准运动控制编程环境,编程环境提供中文与英文及其他语言支持,我司研发部门主要采用英文编程环境;编程语言提供多种的编程语言,本人主要采用功能块与梯形图结合的方式,提高程序的可读性;技术支持方面,施耐德比较到位。

第六章. 运动控制6.1 运动控制地定义6.2 运动控制地组成6.2.1 同步伺服电机6.2.2 步进电机6.2.3 驱动器6.2.4 控制器6.3 运动控制系统地结构6.4 运动控制要解决地问题6.5 伺服电机地选型计算6.6 典型应用6.1 运动控制地定义运动控制是指动作地单元以非常精确地设定速度在规定时间到达准确位置地可控运动.运动单元地运动有如下特点:路径: 有一个初始位置有一个终点位置稳定地速度和上升,下降斜率动作: 静态和动态响应非常精确运动响应很快运动很稳定位置: 有绝对位置有相对位置根据不同地应用工艺, 我们把运动分为有限轴运动和无限轴运动.有限轴运动是指运动体地运动在一定范围内, 如机械手地运动在设计范围内抓取工件.无限轴运动是指运动体连续不断地向一个方向运动,没有边界. 如传送带地运动.6.2 运动控制地组成运动控制地组成离不开以下4个单元,如图:运动控制器: 控制运动按照设定地轨迹动作,不断计算位置和速度地匹配驱动器: 把普通电能转化为向电机提供运动地动力电机: 产生对负载推动地扭矩位置传感器: 提供电机轴实时地位置和速度所以, 运动控制要完成可控地动作, 主要对3个变量进行控制.即: 电机地力矩, 速度, 位置如图所示6.2.1 同步伺服电机首先让我们看一下运动控制中地执行器: 伺服电机电机是把电枢电流转化为电机轴输出力矩地一种装置.从技术角度, 我们通常把电机分为异步电机, 同步电机和步进电机. 从运动形式来分,可分为旋转电机和直线电机. 如图所示:在运动控制系统中,用到地电机通常为同步无刷电机.6.2.1.2 无刷伺服电机地工作原理:集成有位置编码器地电机(位置测量),其转子是永久磁铁, 定子是与异步电机一样地线圈绕组.当定子线圈通上交变电流, 就会在转子周围产生旋转磁场,而转子地磁场就会与定子产生地磁场相互作用, 驱动器根据位置反馈情况, 来调整定子磁场,使转子磁场与定子磁场成90度角,使力矩最大.同时,位置传感器测量出电机轴地旋转角度. 这里,转子地磁场是恒定地(由永久磁铁产生). 而定子地磁场是变化地, 它取决于通到线圈绕组电流地变化频率. 这样转子地转动就跟随着定子地旋转磁场一起运动. 即转子与旋转磁场同步.集成地位置传感器一般为电压分解器形式, 耐用且够一定精度.6.2.1.3 同步伺服电机地特性电机地输出力矩与定子电流( Is )成正比T=C1x Is C1: 为常数电机地转速与定子电流地频率(Freq.Is)成正比S=C2 x Freq.Is C2: 为常数电机在一定重量下,力矩地大小取决于转子地磁性材料地特性,如磁性材料为钕铁硼,或钐钴等.从上式可以看出, 磁通量越大, 轴输出力矩也越大.力矩/速度曲线,电机与驱动器组合通过力矩/速度曲线, 我们可以看出无刷伺服电机,有着低速高转矩,高过载力矩地特性.因此,这种电机能够胜任高精度,高动态响应地运动任务.6.2.2 步进电机.步进电机原理: 步进电机地定子是带有若干对磁极地永久磁铁. 定子是至少有两相绕组地线圈. 当一个绕组线圈通电时,产生磁场,转子被吸到一个磁极, 当另一个绕组通电时,产生另一个磁场,把转子吸到另一个磁极, 就这样定子线圈分步通电, 转子就被吸着一步一步转动了. (如图所示)所以,步进电机不需要位置反馈. 运动方式是开环地.6.2.3 位置传感器位置传感器集成在电机轴上,用来反馈电机旋转地位置和速度.通常有3种位置传感器1.电压分解器型2.增量编码器型3.绝对编码器型位置传感器地特性由3个参数来定义, 这3个参数是:分辨率, 精度和一致性分辨率是指测量一个位置地最小单元. 通常是一转多少脉冲.所以,编码器地分辨率取决于一转多少个脉冲.(例如,编码器分辨率=1024个脉冲/每转)分辨率越高,可以达到地精度就越高.精度:是指实际位置与测量位置地偏差值.(单位是弧分)如果速度源自于位置值,则精度影响速度地测量值.一致性:是指每个周期,编码地重复精度是否一致.这个例子显示,精度很低,但一致性很好.6.2.3.1: 电压分解器型位置传感器电压分解器型位置传感器是一种旋转变压器,它在励磁线圈地激励下,产生正弦,余弦信号, 然后再把正,余弦信号从模拟量转化为数字量, 从而提供出输出轴地绝对位置.6.2.3.2: 增量编码器型位置传感器增量编码器通常在旋转时产生两路信号, 这两路信号记录了旋转地脉冲数, 同时由于两路信号相差90度,可以辨别旋转地方向. 第三路信号是一转只产生一个信号地零度标志信号.6.2.3.3: 绝对编码器型位置传感器绝对位置编码器有很多组码盘,它可以定义电机轴一圈或多圈中地每一个位置. 如图所示:通过机械联接,可以把一个个码盘连接起来,这样就可以对多圈位置进行定义,组成多圈绝对编码. 这些编码存储起来,通过串行通讯发送出来.6.2.4 驱动器驱动器地作用: 用来控制速度并提供电机所需交变电流.驱动器原理: 通过功率变换单元,驱动器调节电机地电流和速度,同时,如有控制器集成在驱动器里,它也可控制电机地位置.6.2.5 控制器运动控制器组合单轴运动地顺序和多轴运动地程序轨迹. 它可以定义好运动轨迹,并且按照定义地轨迹形成与时间相关地位置,速度给定作为运动地参考.如图6.2.5.1 几种典型运动1. 独立轴地运动2. 插补轴运动3.凸轮轴运动把过去固定地机械凸轮转变为柔性地电子凸轮运动.6.3 运动控制系统地结构我们上面说到,一个运动控制系统由3部分组成: 控制器,驱动器和伺服电机. 在实际应用中, 围绕这3个部分各个自动控制制造商给出了基于不同平台地控制结构. 这些控制结构适应了不同地应用需求. 目前主要地应用结构如下:1.基于可编程控制器地结构如图所示, 这种结构地运动控制单元挂在PLC上, 借助PLC软件资源完成各种运动任务. 这些运动控制模板通常有2种控制方式. 一种是输出+/-10V模拟电压, 控制伺服电机地速度, 同时接收伺服电机反馈回来地位置编码, 计算要达到地位置和速度, 形成一个位置闭环, 完成PLC指令下达地运动任务. 另一种方式是位置模板输出脉冲来控制伺服电机地速度和位置. 即脉冲频率控制电机速度, 脉冲个数控制电机要走地位置. 这两种位置控制模板,各个自动化制造商推出地硬件控制标准都是一样地. 因此, 通用性较好, 可以控制任何厂家地伺服电机.施耐德电气提供了从步进电机控制器到伺服电机控制器地全套产品. 它们是基于Premium PLC地步进控制模板TSXCFY, 它输出脉冲. 控制伺服电机地TSXCAY21,TSXXCAY22, TSXCAY33, TSXCAY41, TSXCAY42. 它们输出+/-10V模拟量.具体应用指导可参见参考书<运动控制系统地结构及应用>, 由机械工业出版社出版.2.基于PC运动控制板卡地结构这种结构可借助PC地大量软件资源和高级语言编程来完成各种运动任务. 一般应用在特殊机器地控制上3.控制器集成在驱动器中地结构这种结构简捷,运动任务都存储在驱动器中, 通过数字I/O或现场总线就可以操控伺服地运动了.施耐德电气推出地LEXIUM05 驱动器, 内含了电流环, 速度环和位置环,因此通过I/O可以控制伺服电机地起停. 通过总线,如MODBUS, PROFIBUS-DP, CAN_OPEN 可以控制伺服电机做点到点运动, 做速度,扭矩控制, 做电子齿轮运动. 另一款驱动器LEXIUM15可以存储180条运动任务, 可以用I/O以示教地方式, 让驱动器学习走过地运动任务. 也可以通过现场总线,如:CAN_OPEN, MB+, SERCOS, PROFIBUS-DP, 以太网来控制伺服电机可以控制伺服电机做点到点运动, 做速度,扭矩控制, 做电子齿轮和电子凸轮运动.4.独立控制器结构独立控制器结构是一种非常适合于特殊机器和紧凑机器制造地解决方案. 因为,这种结构不依赖于上位控制平台.控制器或驱动器本身就是一个运动控制处理和曲线计算单元, 它包含有总线通讯控制, 这些总线可以连接到人机界面HMI, 上位PLC, 远程I/O和变频器VSD. 这些单元地控制程序都可以编制在驱动器或控制器内部. 其结构如图所示:这种结构在驱动器中内置了多种运动功能块,非常方便用户地编程.用户可以使用开放地编程语言IEC-61131,在驱动器里来编制需要地各种功能和运动任务.6.4 运动控制要解决地问题同步伺服电机由于其出色地动态响应, 极强地过载能力,平滑地力矩特性和精确地定位使得它在各个领域都有着广泛地应用. 归纳其核心应用,选用大概要解决如下4个问题1.恒速,恒扭矩在某些应用中,要求速度波动很小(速度精度<0.05%)才能完成工艺要求,保证产品质量.例如在卷曲运动中,微小地速度变化会影响到张力.在涂层平整时,微小地速度变化会影响涂层厚度. 这些都要求电机具有很好地速度平稳精度.同样在收/放卷时,为了控制一定地张力, 要求电机地传动在设定张力下进行.2.定位,点到点,包括插补在快速地定位, 输送和机加工中, 由于对位置要求地精度高,需要采用伺服电机.3.电子齿轮在过去地传动中,大量采用机械齿轮箱进行同步传动, 这种主从传动是固定地,有一定地传动误差和磨损. 目前,逐步采用伺服电机做主从电子传动, 称为电子齿轮. 如图所示4.电子凸轮采用伺服电机可以实现类似于机械凸轮地功能, 称为电子凸轮.一般伺服电机作为从轴跟随主轴做非线性地同步运动. 所以电子凸轮曲线可以编辑很多,存储在运动控制器或驱动器中,很方便地调用. 这种柔性设计大大方便了使用者.6.5 伺服电机地选型计算在设计一个运动控制系统时, 我们应尽可能地选择那些转动惯量和负载惯量相等地电机. 一般来说, 负载惯量不应大于10倍地电机转动惯量.当惯量不匹配时,会引起电机振动和超速. 当惯量比很大时,会引起机械地共振. 减速机可以用来降低负载地惯量来适配伺服电机.如图所示:负载速度 = 电机速度 / 齿轮比电机力矩 = 负载力矩 / 齿轮比电机惯量 = 负载惯量 / 齿轮比所以,在选择一个合适地电机时,我们要首先计算一下负载地转动惯量惯量地计算:矩形体地计算以a-a为轴运动地惯量:公式中: 以b-b为轴运动地惯量:圆柱体地惯量空心柱体惯量摆臂地惯量曲柄连杆地惯量带减速机结构地惯量齿形带传动地惯量齿轮组减速结构地惯量滚珠丝杠地惯量折算到电机地力矩传送带地惯量总惯量折算到电机地惯量折算到电机地扭矩齿轮,齿条传动惯量地计算6.6 典型应用6.6.1 雕刻机, 绣花机在雕刻机中,应用伺服电机地2维直线或圆弧插补功能, 来完成各种设计图案地加工.在这种应用中, 控制结构一般采用基于PC机地运动控制板卡. 它可以利用PC 机能运行地多种通用功能软件,来方便地转化,形成各种控制指令. 如CAD软件. 用户只要用CAD软件画出图形, PC机就把图形转化为运动控制卡驱动伺服地各种指令, 来完成曲线地加工. 但在工业恶劣地环境中, PC机地可靠性和抗干扰性不高及长时工作地不稳定性,导致了一些领域必须使用基于PLC地控制结构. 如: 采用施耐德电气基于PLC地位置控制模板TSXCAY33来完成曲线地插补控制. 控制结构如图:CAY33图中标明线号为连接电缆规格,以便用户选用。

浙江亚龙教仪有限公司一、运行Twidosoft软件1、概述首先进入WINDOWS,双击Twidosoft图标,屏幕显示如图1-2,屏幕分为6个区域:标题栏、菜单栏、工具栏、状态栏应用浏览器和编辑查看器。
(如图1-3)标题栏菜单栏工具栏应用浏览器状态栏编辑器和查看器图1-3选择菜单-程序-列表编辑器,进入语句表编程方式,用键盘在编辑区中输入语句表程序,包括指示代码和操作数,回车确认并自动换行。
选择菜单-程序-梯型图编辑器,进入梯型图编程方式,用鼠标点击插入梯级或编辑梯级,编辑触点条件和输出线圈。
2、菜单中常用命令说明2.1“文件”的下拉菜单●“新建”――建立新文件(与工具栏中“”功能相同)选择“新建”命令时,生成一个应用程序,在应用浏览器中显示默认为TWDLMDA40DUK 单击右键更换CPU本体,将其改成与实际工程相匹配的CPU:TWDLCAA24DRF。
●“打开”――打开一个已存的文件(与工具栏中“”功能相同)选择“打开”命令后,屏幕出现一个对话框,选择已存的文件,点击确认将其打开。
●“保存”――存储一个文件(与工具栏中“”功能相同)2当文件是新建时,选择“保存”命令后,屏幕显示保存对话框,输入文件名后,当前程序以该文件名存入。
当文件已经存在时,选择“保存”命令后,当前对文件的修改将保存在文件中。
●“另存为”――将当前程序以新的文件保存选择“另存为”命令后,屏幕显示保存对话框,选择路径并输入文件名后,当前程序以该文件名存入该路径中。
●“打印”――打印文件(与工具栏中“”功能相同)选择“打印”命令后,屏幕显示“打印”窗口,选择所要打印的文件名后,打印机打印该文件。
●“退出”――退出窗口选择“退出”命令后,退出Twidosoft程序,返回到WINDOWS。
2.2编辑●“剪切”――将语句表程序块或梯形图电路块剪切掉(与工具栏中“”功能相同)通过剪切操作,被剪切的块保存在剪切板中。
如果被剪切的数据超过剪切板容量,剪切命令被取消。

以施耐德公司的位置控制模板TSXCAY系列为例:如图所示:9针D型阳插座输出4路模拟信号,可以控制4台驱动器。
15针D型插座接收反馈信号。
反馈信号可以是绝对编码SSI或增量编码RS422。
它们的电源由外部提供。
电源可以是5V或24V。
外部电源由HE10型插座接入。
如图示说明:TSXCAY位置控制单元还集成了基本的输入/输出端子,使得在运动控制过程中更加完善了它的控制功能,例如:原点开关,位置限位,事件开关等,电源也由此输入。
如图所示:I0: 原点开关I1: 紧急停止开关I2: 事件开关I3: 自较正开关Q0:辅助输出下面就是一个在通道0 实际连接的例子。
PO是原点开关,用于程序中的寻原点的执行。
FCD,FCG,AT_UR都是紧急停止开关。
EVT是一个事件开关,可以在程序中进行中断情况的处理。
REC可以是自校正的处理开关。
另外,TSXCAY还集成了对驱动单元的管理功能,例如,驱动器的使能,驱动器出错的报警等。
如图示:COMx, VALVARx为输出到相应驱动器的使能控制。
OK_VARx 为驱动器正常工作的输入信号。
连接如图:TSXCAY 驱动器综上所述,所有这些硬件构成了位置控制的最基本要素,无论是哪家的产品,结构都基本如此。
2.3 脉冲输出的位置控制结构如上图所示脉冲输出对位置的控制,结构简捷,不需要来自电机或驱动器的反馈。
运动的位置取决于驱动器接收的脉冲数,运动的速度取决于脉冲的频率。
对电流,速度,位置的调节都在驱动器里。
它可以实现对位置的点到点的控制和同步跟随控制。
2.4 典型的硬件结构如图所示以施耐德公司的步进控制模板TSXCFY系列为例15针D型插座输出脉冲信号,使能信号。
同时也接收来自驱动器的运行状态信号。
连接结构如下图所示:TSXCFY 驱动器在TSXCFY模板中也集成有基本的输入/输出点,这些输入/输出点构成了运动控制的完整功能。
如限位,原点等。
它们的功能分布如图所示:这些输入/输出点的连接,都是通过HE10端子连接的,通过这些I/O点,实现了对运动过程中,原点的定位,紧急停车及事件的中断处理。
以施耐德公司的位置控制模板TSXCAY系列为例:如图所示:9针D型阳插座输出4路模拟信号,可以控制4台驱动器。
它们的电源由外RS422或增量编码针15D型插座接收反馈信号。
反馈信号可以是绝对编码SSI HE1024V5V部提供。
电源可以是或。
外部电源由型插座接入。
如图示说明:输出端子,使得在运动控制过程中更加完善了它的位置控制单元还集成了基本的输入/TSXCAY 控制功能,例如:原点开关,位置限位,事件开关等,电源也由此输入。
如图所示:原点开关I0:紧急停止开关I1:事件开关I2:自较正开关I3:辅助输出Q0:实际连接的例子。
下面就是一个在通道0是原点开关,用于程序中的寻原点的执行。
PO AT_UR都是紧急停止开关。
,FCDFCG,是一个事件开关,可以在程序中进行中断情况的处理。
EVT REC可以是自校正的处理开关。
还集成了对驱动单元的管理功能,例如,驱动器的使能,驱动器出错的报警TSXCAY另外,等。
如图示:COMx, V ALV ARx为输出到相应驱动器的使能控制。
为驱动器正常工作的输入信号。
OK_V ARx连接如图:TSXCAY驱动器综上所述,所有这些硬件构成了位置控制的最基本要素,无论是哪家的产品,结构都基本如此。
3 脉冲输出的位置控制结构2.如上图所示脉冲输出对位置的控制,结构简捷,不需要来自电机或驱动器的反馈。
运动的位置取决于驱动器接收的脉冲数,运动的速度取决于脉冲的频率。
对电流,速度,位置的调节都在驱动器里。
它可以实现对位置的点到点的控制和同步跟随控制。
典型的硬件结构2.4如图所示TSXCFY以施耐德公司的步进控制模板系列为例D针型插座输出脉冲信号,使能信号。
同时也接收来自驱动器的运行状态信号。
15连接结构如下图所示:驱动器TSXCFY输出点构成了运动控制的完整功//在TSXCFY模板中也集成有基本的输入输出点,这些输入能。
如限位,原点等。
它们的功能分布如图所示:点,实现了对运动过程中,I/O输出点的连接,都是通过HE10端子连接的,通过这些这些输入/ 原点的定位,紧急停车及事件的中断处理。
Lexium 05设计指南及应用案例 施耐德电气运动控制部 前 言随着国内机器制造业的迅猛发展,电气产品的供应商在迎来机遇的同时也面临着严峻的挑战,挑战主要来自两方面,一个是以运动控制为核心的机器设计越来越多,用户迫切需要厂商提供以运动控制为核心,包括PLC、人机界面、传感元器件等多产品综合解决方案的系统及应用支持;另一个是随着机器制造商的产品出售到不同的地域,客户要求产品供应商能提供全天候的技术服务和支持。
在这种背景下,数量有限的运动控制的工程师们即使天天出差,也无法满足销售对我们售前支持的要求和用户迫切解决实际问题的意愿。
因此,我们归纳总结了各种实际案例,编写了这本以Lexium 05伺服为控制核心的整体解决方案的设计和应用指导手册,希望它能够为用户提供及时到位的技术支持;我们也希望本手册可以帮助销售将以运动控制为核心的施耐德整体解决方案,应用到各个OEM行业,推动运动控制产品乃至施耐德全线产品的销售。
在这本指导手册里,我们列举了常见的各种解决方案的实现步骤,典型的运动控制案例及核心技术的实现方式,同时,还介绍了运动控制系统基本的选型设计及设计软件。
随书光盘里附有实际案例供参考和调用。
本书是运动控制技术部优秀工程师们智慧和经验的结晶。
这里我特别感谢李彬,冯洋和李融工程师,他们在编写过程中,为确保案例的正确做了大量的实验,同时,也把在实际应用中常出现的问题做了详细阐述;我还要感谢邓末寒先生为本手册的成文所做的大量工作。
由于时间紧迫,错误之处在所难免,敬请批评指正,以便日后更正。
技术支持经理施耐德电气运动控制技术部李幼涵 目 录 第一章伺服系统的选型 (1)一. 确定传动结构,计算转动惯量 (2)二. 确定运动方式和运动轨迹曲线 (10)三. 计算选择合适的电机及驱动器匹配 (18)四. 得出选型报告 (24)第二章采用脉冲方式控制Lexium 05伺服 (27)一. 概述 (28)二. 脉冲控制方式的接线 (28)三. 脉冲控制方式的设置 (30)四. 脉冲比例的设置 (31)第三章采用模拟量控制Lexium 05伺服 (33)一. 模拟输出量的位置控制结构 (34)二. 模拟量控制方式的接线 (34)三. 模拟量控制方式的设置 (35)四. 典型的控制系统构成 (37)第四章采用Modbus总线通讯控制Lexium 05伺服 (38)一. 概述 (39)二.Modbus总线通讯的硬件连接 (39)三.Modbus总线通讯的软件设置 (40)第五章采用Canopen总线通讯控制Lexium 05伺服 (47)一.概述 (48)二.Canopen总线通讯的硬件连接 (48)三.Canopen总线通讯的软件设置 (50)第六章采用Profibus总线通讯控制Lexium 05伺服 (68)一.概述 (69)二.Profibus总线通讯的硬件连接 (69)三.Profibus总线通讯的软件设置 (70)第一章 伺服系统的选型 第一章 伺服系统的选型 第一章 伺服系统的选型 一.确定传动结构,计算转动惯量设计一套运动控制系统并使系统能够达到设计要求稳定运行,选择合适的驱动器和电机是至关重要的。
第六章. 运动控制6.1 运动控制的定义6.2 运动控制的组成6.2.1 同步伺服电机6.2.2 步进电机6.2.3 驱动器6.2.4 控制器6.3 运动控制系统的结构6.4 运动控制要解决的问题6.5 伺服电机的选型计算6.6 典型应用6.1 运动控制的定义运动控制是指动作的单元以非常精确的设定速度在规定时间到达准确位置的可控运动. 运动单元的运动有如下特点:路径: 有一个初始位置有一个终点位置稳定的速度和上升,下降斜率动作: 静态和动态响应非常精确运动响应很快运动很稳定位置: 有绝对位置有相对位置根据不同的应用工艺, 我们把运动分为有限轴运动和无限轴运动.有限轴运动是指运动体的运动在一定范围内, 如机械手的运动在设计范围内抓取工件. 无限轴运动是指运动体连续不断的向一个方向运动,没有边界. 如传送带的运动.6.2 运动控制的组成运动控制的组成离不开以下4个单元,如图:运动控制器: 控制运动按照设定的轨迹动作,不断计算位置和速度的匹配驱动器: 把普通电能转化为向电机提供运动的动力电机: 产生对负载推动的扭矩位置传感器: 提供电机轴实时的位置和速度所以, 运动控制要完成可控的动作, 主要对3个变量进行控制.即: 电机的力矩, 速度, 位置如图所示6.2.1 同步伺服电机首先让我们看一下运动控制中的执行器: 伺服电机电机是把电枢电流转化为电机轴输出力矩的一种装置.从技术角度, 我们通常把电机分为异步电机, 同步电机和步进电机. 从运动形式来分,可分为旋转电机和直线电机。
如图所示:在运动控制系统中,用到的电机通常为同步无刷电机。
6.2.1.2 无刷伺服电机的工作原理:集成有位置编码器的电机(位置测量),其转子是永久磁铁, 定子是与异步电机一样的线圈绕组.当定子线圈通上交变电流, 就会在转子周围产生旋转磁场,而转子的磁场就会与定子产生的磁场相互作用, 驱动器根据位置反馈情况, 来调整定子磁场,使转子磁场与定子磁场成90度角,使力矩最大.同时,位置传感器测量出电机轴的旋转角度. 这里,转子的磁场是恒定的(由永久磁铁产生). 而定子的磁场是变化的, 它取决于通到线圈绕组电流的变化频率. 这样转子的转动就跟随着定子的旋转磁场一起运动. 即转子与旋转磁场同步.集成的位置传感器一般为电压分解器形式, 耐用且够一定精度.6.2.1.3 同步伺服电机的特性电机的输出力矩与定子电流( Is )成正比T=C1x Is C1: 为常数电机的转速与定子电流的频率(Freq.Is)成正比S=C2 x Freq.Is C2: 为常数电机在一定重量下,力矩的大小取决于转子的磁性材料的特性,如磁性材料为钕铁硼,或钐钴等.从上式可以看出, 磁通量越大, 轴输出力矩也越大.力矩/速度曲线,电机与驱动器组合通过力矩/速度曲线, 我们可以看出无刷伺服电机,有着低速高转矩,高过载力矩的特性.因此,这种电机能够胜任高精度,高动态响应的运动任务.6.2.2 步进电机.步进电机原理: 步进电机的定子是带有若干对磁极的永久磁铁. 定子是至少有两相绕组的线圈. 当一个绕组线圈通电时,产生磁场,转子被吸到一个磁极, 当另一个绕组通电时,产生另一个磁场,把转子吸到另一个磁极, 就这样定子线圈分步通电, 转子就被吸着一步一步转动了. (如图所示)所以,步进电机不需要位置反馈. 运动方式是开环的.6.2.3 位置传感器位置传感器集成在电机轴上,用来反馈电机旋转的位置和速度.通常有3种位置传感器1.电压分解器型2.增量编码器型3.绝对编码器型位置传感器的特性由3个参数来定义, 这3个参数是:分辨率, 精度和一致性分辨率是指测量一个位置的最小单元. 通常是一转多少脉冲。
所以,编码器的分辨率取决于一转多少个脉冲。
(例如,编码器分辨率=1024个脉冲/每转)分辨率越高,可以达到的精度就越高。
精度:是指实际位置与测量位置的偏差值。
(单位是弧分)如果速度源自于位置值,则精度影响速度的测量值。
一致性:是指每个周期,编码的重复精度是否一致。
这个例子显示,精度很低,但一致性很好。
6.2.3.1: 电压分解器型位置传感器电压分解器型位置传感器是一种旋转变压器,它在励磁线圈的激励下,产生正弦,余弦信号, 然后再把正,余弦信号从模拟量转化为数字量, 从而提供出输出轴的绝对位置.6.2.3.2: 增量编码器型位置传感器增量编码器通常在旋转时产生两路信号, 这两路信号记录了旋转的脉冲数, 同时由于两路信号相差90度,可以辨别旋转的方向. 第三路信号是一转只产生一个信号的零度标志信号.6.2.3.3: 绝对编码器型位置传感器绝对位置编码器有很多组码盘,它可以定义电机轴一圈或多圈中的每一个位置. 如图所示:通过机械联接,可以把一个个码盘连接起来,这样就可以对多圈位置进行定义,组成多圈绝对编码. 这些编码存储起来,通过串行通讯发送出来.6.2.4 驱动器驱动器的作用: 用来控制速度并提供电机所需交变电流.驱动器原理: 通过功率变换单元,驱动器调节电机的电流和速度,同时,如有控制器集成在驱动器里,它也可控制电机的位置.6.2.5 控制器运动控制器组合单轴运动的顺序和多轴运动的程序轨迹. 它可以定义好运动轨迹,并且按照定义的轨迹形成与时间相关的位置,速度给定作为运动的参考.如图6.2.5.1 几种典型运动1. 独立轴的运动2. 插补轴运动3.凸轮轴运动把过去固定的机械凸轮转变为柔性的电子凸轮运动.6.3 运动控制系统的结构我们上面说到,一个运动控制系统由3部分组成: 控制器,驱动器和伺服电机.在实际应用中, 围绕这3个部分各个自动控制制造商给出了基于不同平台的控制结构. 这些控制结构适应了不同的应用需求. 目前主要的应用结构如下:1.基于可编程控制器的结构如图所示, 这种结构的运动控制单元挂在PLC上, 借助PLC软件资源完成各种运动任务. 这些运动控制模板通常有2种控制方式. 一种是输出+/-10V模拟电压, 控制伺服电机的速度, 同时接收伺服电机反馈回来的位置编码, 计算要达到的位置和速度, 形成一个位置闭环, 完成PLC指令下达的运动任务. 另一种方式是位置模板输出脉冲来控制伺服电机的速度和位置. 即脉冲频率控制电机速度, 脉冲个数控制施耐德电气提供了从步进电机控制器到伺服电机控制器的全套产品. 它们是基于Premium PLC的步进控制模板TSXCFY, 它输出脉冲. 控制伺服电机的TSXCAY21,TSXXCAY22, TSXCAY33,TSXCAY41, TSXCAY42. 它们输出+/-10V模拟量.具体应用指导可参见参考书<运动控制系统的结构及应用>, 由机械工业出版社出版.2.基于PC运动控制板卡的结构这种结构可借助PC的大量软件资源和高级语言编程来完成各种运动任务. 一般应用在特殊机器的控制上3.控制器集成在驱动器中的结构这种结构简捷,运动任务都存储在驱动器中, 通过数字I/O或现场总线就可以操控伺服的运动了.施耐德电气推出的LEXIUM05驱动器, 内含了电流环, 速度环和位置环,因此通过I/O可以控制伺服电机的起停. 通过总线,如MODBUS, PROFIBUS-DP, CAN_OPEN可以控制伺服电机做点到点运动, 做速度,扭矩控制, 做电子齿轮运动. 另一款驱动器LEXIUM15可以存储180条运动任务, 可以用I/O以示教的方式, 让驱动器学习走过的运动任务. 也可以通过现场总线,如:CAN_OPEN, MB+, SERCOS, PROFIBUS-DP, 以太网来控制伺服电机可以控制伺服电机做点到点运动, 做速度,扭矩控制, 做电子齿轮和电子凸轮运动.独立控制器结构是一种非常适合于特殊机器和紧凑机器制造的解决方案. 因为,这种结构不依赖于上位控制平台.控制器或驱动器本身就是一个运动控制处理和曲线计算单元, 它包含有总线通讯控制, 这些总线可以连接到人机界面HMI, 上位PLC, 远程I/O和变频器VSD.这些单元的控制程序都可以编制在驱动器或控制器内部. 其结构如图所示:这种结构在驱动器中内置了多种运动功能块,非常方便用户的编程.用户可以使用开放的编程语言IEC-61131,在驱动器里来编制需要的各种功能和运动任务.6.4 运动控制要解决的问题同步伺服电机由于其出色的动态响应, 极强的过载能力,平滑的力矩特性和精确的定位使得它在各个领域都有着广泛的应用. 归纳其核心应用,选用大概要解决如下4个问题1.恒速,恒扭矩在某些应用中,要求速度波动很小(速度精度<0.05%)才能完成工艺要求,保证产品质量.例如在卷曲运动中,微小的速度变化会影响到张力.在涂层平整时,微小的速度变化会影响涂层厚度. 这些都要求电机具有很好的速度平稳精度.同样在收/放卷时,为了控制一定的张力, 要求电机的传动在设定张力下进行.2.定位,点到点,包括插补在快速的定位, 输送和机加工中, 由于对位置要求的精度高,需要采用伺服电机.3.电子齿轮在过去的传动中,大量采用机械齿轮箱进行同步传动, 这种主从传动是固定的,有一定的传动误差和磨损. 目前,逐步采用伺服电机做主从电子传动, 称为电子齿轮. 如图所示4.电子凸轮采用伺服电机可以实现类似于机械凸轮的功能, 称为电子凸轮.一般伺服电机作为从轴跟随主轴做非线性的同步运动. 所以电子凸轮曲线可以编辑很多,存储在运动控制器或驱动器中,很方便地调用. 这种柔性设计大大方便了使用者.6.5 伺服电机的选型计算在设计一个运动控制系统时, 我们应尽可能的选择那些转动惯量和负载惯量相等的电机. 一般来说, 负载惯量不应大于10倍的电机转动惯量.当惯量不匹配时,会引起电机振动和超速. 当惯量比很大时,会引起机械的共振.减速机可以用来降低负载的惯量来适配伺服电机.如图所示:负载速度 = 电机速度 / 齿轮比电机力矩 = 负载力矩 / 齿轮比电机惯量 = 负载惯量 / 齿轮比所以,在选择一个合适的电机时,我们要首先计算一下负载的转动惯量惯量的计算:矩形体的计算以a-a为轴运动的惯量:公式中:以b-b为轴运动的惯量:圆柱体的惯量空心柱体惯量摆臂的惯量曲柄连杆的惯量带减速机结构的惯量齿形带传动的惯量齿轮组减速结构的惯量滚珠丝杠的惯量折算到电机的力矩传送带的惯量总惯量折算到电机的惯量折算到电机的扭矩齿轮,齿条传动惯量的计算6.6 典型应用6.6.1 雕刻机, 绣花机在雕刻机中,应用伺服电机的2维直线或圆弧插补功能, 来完成各种设计图案的加工.在这种应用中, 控制结构一般采用基于PC机的运动控制板卡. 它可以利用PC机能运行的多种通用功能软件,来方便的转化,形成各种控制指令. 如CAD软件. 用户只要用CAD软件画出图形, PC机就把图形转化为运动控制卡驱动伺服的各种指令, 来完成曲线的加工. 但在工业恶劣的环境中, PC机的可靠性和抗干扰性不高及长时工作的不稳定性,导致了一些领域必须使用基于PLC的控制结构. 如: 采用施耐德电气基于PLC的位置控制模板TSXCAY33来完成曲线的插补控制. 控制结构如图:CAY33图中标明线号为连接电缆规格,以便用户选用这种结构的优点是能够工作在较恶劣的环境下, 能够长时间连续加工,可靠性高. 但由于基于PLC, 一些通用的图形软件无法使用, 给编辑图形带来了诸多不便.根据这种情况,施耐德又推出了一款新的控制器LEXIUM PAC, 它相当于一个独立的运动控制结构.内部可以调用各种功能块来编程, 能够实现2轴的直线和圆弧插补. 曲线的编辑可以编写曲线指令或把用CAD画好的图形调入控制器即可. 其结构简捷, 可靠性提高. 如图示在控制器里, 可以存储设计好的各种图形, 通过人机界面可以调用这些图形. 人机界面可以通过以太网连到控制器,也可以通过MODBUS连到控制器. 这种控制器可以扩展需要的逻辑I/O点, 也可以外接编码器,作为主轴信号.6.6.2 绕线机绕线机的工艺实现要用到电子凸轮的功能, 由于要绕各种规格的线, 所以就需要不同的凸轮曲线. 这些凸轮曲线也要存储在控制器中, 随时调用. 目前实现这种功能, 最简单的方案就是独立运动结构.凸轮曲线的编辑可以用嵌入在控制器中的编辑器来完成.6.6.3 滚剪滚剪其功能是实现定长剪切, 剪切的材料可以是带钢, 塑料或纸张. 输送材料是连续的, 因此联在滚刀(绿色)上的伺服电机跟随后面的牵引辊做同步运动, 由于在剪切时, 刀的速度要与牵引速度一致, 因此,设计的剪切曲线必须如下所示:绿色为速度曲线, 黑色为位置曲线, 粉色为加速曲线.这样在剪切时就不会造成堆料或拉料了.6.6.4 灌装机灌装机要实现以下几种功能.1. 瓶子在进入灌装之前, 要按照工艺要求进行分列整理.即:把无序的瓶子码放整齐. 用到速度同步功能2. 灌装口与码放整齐的瓶子同步运动, 完成灌装. 用到电子凸轮功能.3. 传感器检测到瓶子位置, 用到快速位置定位功能.因此,它的控制结构为独立控制器结构。