Elmo应用案例集锦
- 格式:pdf
- 大小:2.80 MB
- 文档页数:28
多模态大模型的十大应用案例
嘿,朋友们!今天咱就来聊聊多模态大模型的十大应用案例,保证让你大开眼界!
先来说说自动驾驶,你想想啊,就像有个超级智能的司机在掌控车子,它能同时处理图像、声音等各种信息,多厉害呀!特斯拉不就是在搞这个嘛!
再看看医疗领域,哇塞,多模态大模型可以帮助医生更准确地诊断疾病呢!就好比给医生配了一个超级厉害的助手,能分析各种检查结果,这不是能拯救好多人的生命嘛!
还有智能客服呀,那不就跟和一个懂超多知识的朋友聊天似的嘛,不管啥问题都能给你快速又准确的回答,多方便!好多大公司不都在用嘛。
教育方面呢,就像是给学生们请了个全能的家教,能教各种科目,还能随时根据学生的特点调整教学方式。
在娱乐行业,哇哦,它可以创造出超级逼真的虚拟场景和角色,让你仿佛身临其境,那感觉,爽不爽?
设计领域也少不了它呀,就像有个创意无限的大师在旁边给你出点子,让设计变得更酷炫。
制造业里面,它能帮忙检测产品质量,这不就像有个火眼金睛的检验员嘛。
营销领域呢,多模态大模型可以精准分析消费者喜好,那不就是知道你心里在想啥,给你推送你喜欢的东西嘛,厉害吧!
金融领域也有它的身影哦,能帮着分析各种数据,做出更明智的投资决策呀。
最后就是智慧家居啦,就跟家里有个智能管家一样,能帮你控制各种设备,多舒适的生活呀!
总之,多模态大模型的应用真是无处不在,它真的是在改变我们的生活呀!你们说是不是超级厉害呢!这十大应用案例只是其中的一部分,未来它肯定还会给我们带来更多的惊喜和改变,让我们一起期待吧!。
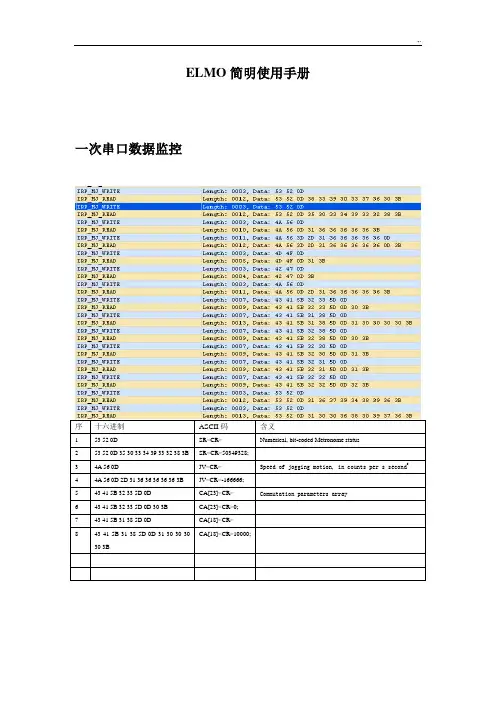
ELMO简明使用手册一次串口数据监控序十六进制ASCII码含义1 53 52 0D SR<CR> Numerical, bit-coded Metronome status2 53 52 0D 35 30 33 34 39 33 32 38 3B SR<CR>50349328;3 4A 56 0D JV<CR> Speed of jogging motion, in counts per s second24 4A 56 0D 2D 31 36 36 36 36 36 3B JV<CR>-166666;5 43 41 5B 32 33 5D 0D CA[23]<CR> Commutation parameters array6 43 41 5B 32 33 5D 0D 30 3B CA[23]<CR>0;7 43 41 5B 31 38 5D 0D CA[18]<CR>8 43 41 5B 31 38 5D 0D 31 30 30 30CA[18]<CR>10000;30 3B上电ELMO演示箱连接演示箱的ELMO演示箱的COM1 到电脑的串口(COM1)打开ELMO软件(软件可以到官方网站下载)单击完成选择速度模式(Velocity Mode)单击圈选的按钮(motor on)进入速度模式输入一个速度值,单击GO,电机以输入的速度运转单击Stop停止,单击Direction改变方向。
输入20000(cnt/sec)按回车后,相当于输入JV=20000;BG我们可以在命令输入框内输入命令实现控制。
输入:JV=30000;回车BG 回车电机以30000cnt/sec运转输入:ST 回车电机将停止提示:ST(相当于STOP)BG(相当于BEGIN)设定数字输入端口的功能我们可以设定INPUT 1为高电平,硬停止通过命令输入JV=30000;BG电机开始旋转,然后将INPUT 1拨动到高电平,电机停止,当INPUT 1拨回高电平后,电机恢复运转,因为硬停止,并不更改软件的运动状态。
elmo驱动原理Elmo驱动原理1. 引言Elmo是一种常见的驱动器,用于控制电机或执行器的运动。
它采用先进的技术,使得电机的控制更加精确、高效。
本文将从浅入深地介绍Elmo驱动原理。
2. 电机控制基础知识在深入Elmo驱动原理之前,有必要了解一些电机控制的基础知识。
电机控制涉及三个主要方面:电流控制、速度控制和位置控制。
电流控制是通过对电机加入不同的电流来控制电机的转矩;速度控制是通过改变电机的转速;位置控制是使电机运动到特定的位置。
3. Elmo驱动原理概述Elmo驱动器是一种先进的驱动器,采用了独特的控制算法和硬件设计,以实现更高精度的电机控制。
它主要包括以下几个方面:电机模型Elmo驱动器采用一种准确的电机模型来估计电机的动态响应特性。
这种电机模型可以通过观察电机的反馈信号和输入信号之间的关系来建立。
通过准确估计电机模型,Elmo驱动器可以更好地控制电机的转矩、速度和位置。
闭环控制Elmo驱动器采用闭环控制系统,通过不断监测电机的反馈信号和期望输出信号之间的误差,来调整电机的控制信号。
这种闭环控制可以根据需要进行电流、速度或位置控制。
高速数据采集Elmo驱动器具备高速数据采集功能,可以以非常高的频率采集电机的反馈信号。
这使Elmo驱动器能够对电机的动态响应进行更准确的估计,并能够更快速地校正控制信号。
智能算法Elmo驱动器内置智能算法,可以根据实际应用场景和电机特性进行自适应控制。
它可以根据需要调整控制参数,以实现更高的控制精度和响应速度。
4. Elmo驱动应用Elmo驱动器广泛应用于各种需要精确电机控制的领域,例如机器人、自动化生产线、医疗设备等。
它的高精度控制能力和智能算法使其成为许多关键应用的首选。
5. 结论Elmo驱动器是一种先进的电机驱动器,具备高精度控制和智能算法。
它的独特设计和先进技术,使其在电机控制领域有着广泛的应用。
通过了解Elmo驱动原理,我们可以更好地理解其工作原理,并在实际应用中发挥其优势。
广州周立功单片机科技有限公司ElLMOS E527.05雨量成传感器方案 类别内容 关键词雨量传感器、ELMOS 、E527.05 摘 要 为实现环境光和雨量的监测,elmose 推出了环境光和雨量监测的集成传感器方案——E527.05,此款传感器芯片只需要外接几颗红外发光管和光电二极管,就能实现环境光和雨量的监测,大大降低了电路的设计复杂度。
WeChat NoteElLMOS E527.05雨量成传感器方案摘要:为实现环境光和雨量的监测,elmose推出了环境光和雨量监测的集成传感器方案——E527.05,此款传感器芯片只需要外接几颗红外发光管和光电二极管,就能实现环境光和雨量的监测,大大降低了电路的设计复杂度。
推送目的:干货分享是否原创:是关键字:雨量传感器、ELMOS、E527.05正文:随着科技发展,车载设备的自动化程度越来越高。
如图为市面上流行的汽车自动感应大灯开关及雨量传感器。
当大灯开关指向AUTO处时,大灯在天黑到一定程度时就会自动打开,例如在过隧道的时候会自动打开,出了隧道会自动熄灭。
如果有雨点滴在雨量传感器上,它可感应雨量大小控制雨刮频率而无需手动调节。
为实现环境光和雨量的监测,elmose推出了环境光和雨量监测的集成传感器方案——E527.05,此款传感器芯片只需要外接几颗红外发光管和光电二极管,就能实现环境光和雨量的监测,大大降低了电路的设计复杂度。
此外传感器芯片还提供了LIN Bus接口,方便传感器加入到汽车的通信网络。
此方案对环境光和雨量的测量是基于光学系统实现的:在没有水滴的情况下,挡风玻璃内部发射光线的反射角应该比挡风玻璃内部全反射临界角大(玻璃到空气的临界角为41°,斯涅尔定律)在有水滴的情况下,挡风玻璃内部发射光线的反射角应该比挡风玻璃内部全反射临界角角小(玻璃到水的临界角为61°,斯涅尔定律)在光学系统满足以上两点特性的情况下,挡风玻璃表面无水时内部光线产生全反射,有水时不产生全反射(产生反射和折射)。
ELMo解读(论⽂+PyTorch源码)ELMo的概念也是很早就出了,应该是18年初的事情了。
但我仍然是后知后觉,居然还是等BERT出来很久之后,才知道有这么个东西。
这两天才仔细看了下论⽂和源码,在这⾥做⼀些记录,如果有不详实的地⽅,欢迎指出~⽂章⽬录前⾔⼀. ELMo原理1. ELMo整体模型结构2. 字符编码层3. biLMs原理4. ⽣成ELMo词向量5. 结合下游NLP任务⼆. PyTorch实现1. 字符编码层2. biLMs层3. ⽣成ELMo词向量三. 实验四. ⼀些分析1. 使⽤哪些层的输出?2. 在哪⾥加⼊ELMo?3. 每层输出的侧重点是什么?4. 效率分析五. 总结传送门前⾔ELMo出⾃Allen研究所在NAACL2018会议上发表的⼀篇论⽂《Deep contextualized word representations》,从论⽂名称看,应该是提出了⼀个新的词表征的⽅法。
据他们⾃⼰的介绍:ELMo是⼀个深度带上下⽂的词表征模型,能同时建模(1)单词使⽤的复杂特征(例如,语法和语义);(2)这些特征在上下⽂中会有何变化(如歧义等)。
这些词向量从深度双向语⾔模型(biLM)的隐层状态中衍⽣出来,biLM 是在⼤规模的语料上⾯Pretrain的。
它们可以灵活轻松地加⼊到现有的模型中,并且能在很多NLP任务中显著提升现有的表现,⽐如问答、⽂本蕴含和情感分析等。
听起来⾮常的exciting,它的原理也⼗分reasonable!下⾯就将针对论⽂及其PyTorch源码进⾏剖析,具体的资料参见⽂末的传送门。
这⾥先声明⼀点:笔者认为“ELMo”这个名称既可以代表得到词向量的模型,也可以是得出的词向量本⾝,就像Word2Vec、GloVe这些名称⼀样,都是可以代表两个含义的。
下⾯提到ELMo时,⼀般带有“模型”相关字眼的就是指的训练出词向量的模型,⽽带有“词向量”相关字眼的就是指的得出的词向量。
ELMO简明使用手册ELMO简明使用手册欢迎使用ELMO(Emotional Language Modeling Toolkit)。
ELMO是一个强大的情感分析工具,可以帮助大家理解和生成情绪化的文本。
以下是使用ELMO的简要指南。
一、安装ELMO首先,确保您的系统满足ELMO的最低要求。
ELMO需要Python 3.5或更高版本,以及一些常用的Python库,如numpy和tensorflow。
您可以通过以下命令使用pip安装ELMO:二、导入ELMO导入ELMO模块,您需要使用以下代码:三、准备数据ELMO需要情感分析的文本数据。
您需要将文本数据分为训练集和测试集。
训练集用于训练ELMO模型,而测试集用于评估模型的性能。
四、创建ELMO模型使用ELMO,您需要创建一个情感分析模型。
以下是如何创建一个情感分析模型的示例代码:在上面的代码中,num_layers参数指定了ELMO模型的层数。
您可以根据需要调整该参数。
五、训练ELMO模型使用ELMO进行情感分析时,您需要训练模型。
以下是如何训练ELMO 模型的示例代码:在上面的代码中,training_data参数是用于训练ELMO模型的文本数据,epochs参数指定了训练的轮数,batch_size参数指定了每批次训练的文本数量。
您可以根据需要调整这些参数。
六、使用ELMO进行情感分析一旦您的ELMO模型经过训练,您可以使用它进行情感分析。
以下是如何使用ELMO进行情感分析的示例代码:在上面的代码中,test_data参数是用于测试ELMO模型的文本数据,predictions变量包含ELMO模型对测试数据的情感分析结果。
您可以根据需要使用这些结果。
七、评估ELMO模型为了评估ELMO模型的性能,您可以使用一些评估指标,如准确率、精确度和召回率等。
以下是如何评估ELMO模型的示例代码:在上面的代码中,test_data参数是用于评估ELMO模型的文本数据,metrics变量包含ELMO模型的评估结果。
elmos上位机理解Elmo's上位机是指Elmo运动控制器的上层控制软件,它是Elmo运动控制系统中的一个重要组成部分。
Elmo运动控制器是一种先进的运动控制设备,广泛应用于工业自动化、机器人、医疗设备和其他领域。
Elmo's上位机的主要功能是通过图形界面与Elmo运动控制器进行交互,实现对控制器的参数配置、运动控制、监控和诊断等操作。
从功能角度来看,Elmo's上位机具有以下几个方面的理解:1. 参数配置,用户可以通过Elmo's上位机对运动控制器的参数进行配置,包括电机参数、运动模式、控制策略等。
这些参数的设置直接影响到控制系统的性能和行为,因此需要通过上位机进行精细调整。
2. 运动控制,Elmo's上位机提供了丰富的运动控制功能,用户可以通过图形界面轻松实现对电机的速度控制、位置控制、力控制等。
同时,上位机还支持运动轨迹的规划和执行,可以实现复杂的多轴协同运动。
3. 监控与诊断,上位机可以实时监测运动控制器和电机的工作状态,包括电流、速度、位置等参数的实时显示。
同时,上位机还可以对系统进行诊断,提供故障诊断和报警功能,帮助用户快速定位和解决问题。
从应用角度来看,Elmo's上位机的使用对于工程师和技术人员来说具有重要意义:1. 工程师可以通过Elmo's上位机对机器人、自动化设备等系统进行调试和优化,提高系统的性能和稳定性。
2. 技术人员可以通过上位机对运动控制系统进行故障诊断和维护,保证设备的正常运行和生产效率。
总的来说,Elmo's上位机作为Elmo运动控制系统的重要组成部分,具有丰富的功能和广泛的应用价值,对于实现精密运动控制和提高自动化设备的性能具有重要意义。
希望以上回答能够满足你的需求。
自然语言处理的ELMO使用1、概述word embedding 是现在自然语言处理中最常用的word representation 的方法,常用的word embedding 是word2vec的方法,然而word2vec本质上是一个静态模型,也就是说利用word2vec训练完每个词之后,词的表示就固定了,之后使用的时候,无论新句子上下文的信息是什么,这个词的word embedding 都不会跟随上下文的场景发生变化,这种情况对于多义词是非常不友好的。
例如英文中的Bank这个单词,既有河岸的意思,又有银行的意思,但是在利用word2vec进行word embedding 预训练的时候会获得一个混合多种语义的固定向量表示。
即使在根据上下文的信息能明显知道是“银行”的情况下,它对应的word embedding的内容也不会发生改变。
ELMO的提出就是为了解决这种语境问题,动态的去更新词的word embedding。
ELMO的本质思想是:事先用语言模型在一个大的语料库上学习好词的word embedding,但此时的多义词仍然无法区分,不过没关系,我们接着用我们的训练数据(去除标签)来fine-tuning 预训练好的ELMO 模型。
作者将这种称为domain transfer。
这样利用我们训练数据的上下文信息就可以获得词在当前语境下的word embedding。
作者给出了ELMO 和Glove的对比对于Glove训练出来的word embedding来说,多义词play,根据他的embedding 找出的最接近的其他单词大多数几种在体育领域,这主要是因为训练数据中包含play的句子大多数来源于体育领域,之后在其他语境下,play的embedding依然是和体育相关的。
而使用ELMO,根据上下文动态调整后的embedding不仅能够找出对应的“表演”相同的句子,还能保证找出的句子中的play对应的词性也是相同的。
目录案例一:让“东航e学网”成为员工身边学校 (2)案例二:大唐电信E-learning建设 (7)案例三:宝钢,制造行业中的E路先锋 (10)案例四:E-Learning助民生银行“二次腾飞” (15)案例一:让“东航e学网”成为员工身边学校2010年5月,世界将目光聚集在东方。
上海再次因世博会成为人们梦想的地方。
据悉,世博期间将约有1600万人次通过航空出行到上海参访。
旅客人数急剧上升,这对航空业发展来说既是机遇,又是挑战。
2006年3月14日,中国东方航空股份有限公司(以下简称东航)在激烈的竞争中脱颖而出,成为2010上海世博会首家全球合作伙伴及唯一航空客运承运人。
为了能够为国内外的旅客架起高品质、高效率、高品位的“世博快线”,东航提出“东航,让旅行更精彩!”和“世界在您眼前,东航在您身边”的世博口号。
这一次,人们又将目光聚焦在中国东方航空股份有限公司的服务上。
为了能够“参与世博、宣传世博、服务世博”,中国东方航空股份有限公司全员上下都积极行动起来,一切为提高服务质量而努力。
中国东方航空股份有限公司培训中心充分利用东航e学网平台为员工充电加油。
东航e学网也因此受到E-Learning行业人士的关注。
6月初,记者奔赴上海采访了东航培训中心副总经理金慧青女士。
她谦逊的态度和干练的处事风格,给记者留下深刻的印象。
当提到东航E-Learning项目,金慧青脸上露出了微笑,她说她很为她的团队骄傲!大家都是靠着激情做事,经常在工作和讨论中碰撞出思想的火花,使项目建设得更加有新意,这也让她感到很有成就感。
金慧青说: “东航e学网的建设总目标是服务于生产,让员工通过网上的专业知识学习之外,还可以了解到沟通、礼仪、养身、各国民俗等知识,让他们的工作和生活更加丰富、更充实,让每一位员工都能感受到学习带来的快乐。
”航空特点促成E-Learning快速发展东航总部设在上海,是我国三大骨干航空运输集团之一。
自1988年至今,分别在国内先后成立了14家分子公司。
Leap Motion 交互案例介绍Leap Motion 是一种基于手势识别技术的无需触摸的交互设备,通过识别和追踪人手的动作和姿势,实现与电脑和移动设备的交互。
在本文中,我们将介绍 Leap Motion 的工作原理、应用场景和交互案例。
首先,我们将从 Leap Motion 的基本原理开始。
工作原理Leap Motion 是通过红外线传感器和双目摄像头来实现手势追踪的。
红外线传感器用于检测手的位置和运动,而摄像头则用于判断手部的形状和姿势。
Leap Motion 基于机器学习算法,通过分析手的形状、大小、位置和动作等特征,将手势识别成不同的指令。
这些指令可以用于控制电脑和移动设备的操作,如移动鼠标、滚动屏幕、打开应用程序等。
应用场景Leap Motion 的应用场景非常广泛,可以适用于许多领域和行业。
以下是一些常见的应用场景:1. 游戏Leap Motion 可以提供更直观和沉浸式的游戏体验。
玩家可以通过手势来操控游戏中的角色和物体,增强游戏的乐趣和刺激性。
例如,玩家可以用手势来模拟射击、划动、抓取等动作,使游戏更加身临其境。
2. 教育Leap Motion 可以被用于教育领域,帮助学生更好地理解和学习各种学科。
通过手势操作,学生可以与模拟实验、虚拟地球、分子模型等进行互动,提高学习兴趣和效果。
同时,Leap Motion 还可以用于教学演示和交互式课件制作,提升教学环境和方式。
3. 医疗Leap Motion 可以在医疗领域提供更精确和高效的手术操作。
医生可以通过手势来操控和导航手术设备,实现更精细和准确的手术操作。
此外,Leap Motion 还可以用于康复训练和医疗诊断,帮助患者恢复功能和监测疾病。
4. 艺术和设计Leap Motion 可以帮助艺术家和设计师更自由和创造性地表达自己的想法和创意。
通过手势操作,他们可以绘制、建模、雕塑等,实现更直观和灵活的设计过程。
同时,Leap Motion 还可以与虚拟现实和增强现实技术结合,创造出更丰富和真实的艺术和设计作品。
eprime经典程序案例
E-Prime是一种用于心理学和神经科学研究的实验设计和控制软件。
它被广泛应用于认知心理学、神经科学、教育研究和其他行为科学领域。
E-Prime提供了一个直观易用的界面,可以用于创建各种类型的实验范式,包括反应时间实验、事件相关电位研究、眼动追踪实验等。
经典的E-Prime程序案例之一是用于研究注意力的实验。
在这个实验中,参与者通常需要在屏幕上呈现的刺激(如文字、图像或声音)出现时作出反应。
研究者可以使用E-Prime来控制刺激的呈现顺序、持续时间以及记录参与者的反应时间和准确性。
通过这种方式,研究者可以定量地测量参与者对不同类型刺激的注意力和反应特征。
另一个经典的E-Prime程序案例是用于研究记忆的实验。
在这类实验中,参与者可能需要学习一系列单词、图片或其他材料,然后在一段时间后进行记忆测试。
研究者可以使用E-Prime来呈现学习材料、控制学习和测试的时间间隔,并记录参与者的记忆表现。
通过这种方式,研究者可以研究不同条件下的记忆表现差异,比如学习材料的类型、学习时间等因素对记忆的影响。
除了这些经典的实验范式之外,E-Prime还可以用于更复杂的实验设计,比如双重任务范式、条件性学习任务等。
研究者可以利用E-Prime的编程功能来创建复杂的实验流程,实现更精细的实验控制和数据记录。
总之,E-Prime作为一款功能强大的实验设计和控制软件,为行为科学研究提供了重要的工具和支持。
关于ELMO产品在机器人方面应用1.ELMO产品介绍2.ELMO典型架构3.SIMPIQ系列驱动器介绍(WHI)4.G‐MAS介绍5.ELMO的优点6.ELMO在自走机器人上的应用7.具体功能实现实例:8.ELMO的应用案例天津罗升企业有限公司伺服产品处一: ELMO产品介绍1.公司介绍: Elmo公司成立于1988年,是专业的自动控制供应商,生产,研发,销售等均在以色列完成,驱动器拥有目前最高的功率密度与最小的体积,目前产品家族拥有三大系列:SIMPLIQ 用于通用环境下使用(工业级产品)EXTRIQ 用于扩展环境下使用(军事级产品).GOLD系列为前两个系列的扩展升级版本,也拥有工业级和军工级的产品.2.产品介绍:a.拥有全数字式伺服驱动器和模拟式驱动器,数字式包含完整的扭力,速度位置控制,并支持全闭环两路反馈.模拟式驱动器可做扭力或速度控制(通过模拟量)b.数字式驱动器拥有交流输入和直流输入两类,交流目前可提供最大380VAC,35A的驱动器,直流可提供680VDC,100A的驱动器c.军工级产品已在国内多次使用,并符合美军标3.ELMO产品系列附图二:EL MO的典型架构:1.架构简介:标准的ELMO多轴产品构架核心为ELMO的多轴控制器G‐MAS,其可以通过以太网与工控机连接,并通过CANOPEN总线控制多达100轴运行,单独驱动器可以控制电机做扭力,速度,位置控制,并通过电机本身编码器反馈,还可以做全闭环控制,同时接受电机侧和负载侧的两路编码器反馈,已提高精度.2.架构图:三:GOLD系列驱动器介绍(主要介绍WHI)1.供电部分: 该系列产品均为直流母线方式供电,供电电压为12VDC – 95VDC,其输出的电流额定最大为20A,峰值40A(峰峰值)2.驱动器拥有完整的位置,速度,扭力3个环路,并支持全闭环控制.超高带宽和高速处理能力,使伺服拥有高速,高刚性,高精度特性a.电流环 14K Hzb.速度环 7kHzc.位置环 3.5KHz3.智能PID调节方式,并可以适应大多数类型负载,如刚性,柔性负载,或负载有明显偏心等.4.兼容多种类型电机a.交流永磁同步电机b.直流无刷电机c.直流有刷电机d.直线电机e.力矩电机f.音圈电机5.兼容多种编码器反馈类型a.标准增量式光电编码器b.旋转变压器c.带细分的正余弦编码器d.测速发电机/电位计e.海德汉绝对式编码器(ENDAT 2.1)6.驱动器内部可以编写复杂程序,单独控制驱动器做各种运动曲线a.内部逻辑运算,正余弦函数等b.PTP(点到点运行),JV(点动),PVT(提前或动态规划位置,速度,时间曲线运行)PT(位置,时间曲线),ECAM(电子凸轮功能),其中PVT,PT,ECAM内部支持高次平滑,7.程序编写类似于C,上手比较容易8.支持模拟量控制,精度14位9.拥有6个DI,2个DO和1个AI,且IO信号均支持任意定义功能,并可以在驱动器中通过程序控制10.可通过CAN总线与G‐MAS通讯,时时接收G‐MAS的运动控制指令,11.下图为驱动器图片四: G‐MAS介绍1.供电部分: 使用24VDC供电2.内部使用实时LINUX操作系统,标准的C++编程语言,并使用标准的PLCopen库函数作为API使用3.支持标准CAN总线通讯,最多控制100轴做高等级高精度运动控制.4.支持多种与工控机通讯方式(ETHERNET, UDP, Telnet, FTP, HTTP等)a.Ethernet: 10/100MB:2.0 12M5.超小体积,并支持内嵌式安装方式(需焊接)6.内部大容量的存储控制,方便储存用户的运动控制数据.a.Flash (32M)b.RAM(64M)DDR2 333MHz7.G‐MAS可以通过总线时时读取驱动器的运动状态,比如位置,速度,电流,IO等,并在G‐MAS中控制a.DS402 COE EtherCATb.DS402 CANopen8.控制方式:G‐MAS作为多轴控制器,主要做多轴控制的协调,由G‐MAS给各个轴发送控制指令,由驱动器执行,执行结果在反馈回G‐MAS做处理,由于GMAS内部固有的大量控制指令,所以在客户后期开发的时候,可以直接调用该函数,这样做比客户直接通过上位机来发控制指令更省力.a.单轴或多轴点动b.多轴同动(速度同步或直线插补,最多16轴)c.多轴螺旋线插补(圆弧插补)d.支持上位机动态发送位置命令,也可由G‐MAS动态生成运行曲线并控制驱动器运行.e.DS402 Homingf.高阶速度切换平滑功能,当运行2组不同速度曲线时,可确保速度切换时平滑过渡,并可设定平滑的系数,确保对系统不会冲击过大g.内建固有函数,可任意操作外部IOh.多线程运行,标准的状态机控制方式,可同时对运行状态,IO状态,驱动器或G‐MAS的运行状态进行监控并同时多线程操作i.内部存储空间较大,可存储客户数据库信息j.与上位机为标准modbus‐tcp通讯9.下图为G‐MAS图片五:ELMO的优点:1.高级同步精度:目前可以保证G‐MAS与WHI在CAN通讯下,可以确保单轴同步时间在1毫秒以内2.支持分布式控制,由于G‐MAS(多轴控制器)和WHI(伺服驱动器)都可以编写程序,可以保证双余度的安全控制,即便工控机或G‐MAS均出现死机的情况下,依旧可以依靠驱动器内部程序执行提前设定好的指令,确保系统的高可靠性与容错性.3.采用同步的LINUX系统,标准的C++语言,标准的PLCopen库函数,程序的通用性和扩展性得到极大保障,4.超小体积,超高功率密度,可以完美的使用在机器人等狭小空间.5.高可靠性,其中军工级别驱动器无故障工作时间达到50万小时(实验室测试数据)6.上手简单,各种功能可以先不通过C++编写完才能调试,可以通过内部脚本文件先行进行调试,7.高智能化的现场分析工具,可以任意监控驱动器和控制器的工作状态,可随意读取上百种系统变量,查找故障.8.简单的操作界面,内部固化大量运行控制功能,无需客户进行开发,只需使用时调用该功能块即可实现客户复杂的需求六:ELMO在自走机器人上的应用:1.G‐MAS控制功能:G‐MAS是ELMO专用多轴运动控制器,其可以同时控制100轴运行.其内部支持定义群组同动或插补运行功能,由于LINUX是实时操作系统,其可以在上位机上实时计算出6轴的实时位置和速度,并发送给G‐MAS,由G‐MAS做多轴的协调控制工作,确保6轴位置速度同步.2.驱动器功能:由驱动器接收到G‐MAS的运动命令后执行,由于驱动器内部自建位置,速度,扭力闭环,其可以实际运行满足控制效果3.若出现单轮阻力过大甚至卡住现象,驱动器可瞬间提升扭力已进行补偿,确保6轴同动.4.在上位机和G‐MAS的配合下,也可以实现类似汽车ESP系统的类似功能,当其中一个轴或部分电机出现彻底卡住或悬空状况下,提升其他伺服的出力已保证正常通过大跨度障碍.5.在上位机和G‐MAS配合下,可轻松实现点动,匀速运行,倒车,任意半径转弯,当左右两侧伺服反转时,可实现已自身为圆心自转,轻松实现在复杂狭窄区间转向等功能.6.具体应用时:a.系统要求直行时:可以先把左右侧的轴编入同一个组,两侧输入相同的速度即可实现直行动作.b.系统要求倒车时:可以先把左右侧的轴编入同一个组,两侧输入相同的速度即可实现倒车动作.c.系统要求转弯时:可以把左右侧电机分别编入两个不同的组,固定一侧电机只运行另一侧电机,则可实现转弯的动作.d.在直行或转弯时,若出现大障碍造成无法通过,驱动器可时时检测当前负载状况,当小于其他伺服即进行判断,是否是打滑或障碍出现.并将信息反馈给G‐MAS或工控机等e.固化各种报警处理机制,很方便的输出报警或运行信息f.可以很方便的编组和拆组多轴.g.可以提前给系统使用TXT文件等规划系统运行参数,并且可在G‐MAS中时时修改,保存,删除数据等.七: 具体功能实现实例:1.资源的创建:资源需要提前配置,且非常简单,只需要按照实际要求创建几个组即可,之后只需要运行标准的程序套件即可轻松实现多轴同动,且效果非常好.无需进行复杂的程序编写,对调试人员的压力也小很多.(也可参看附件视频文件)2.多轴同动: (3轴螺旋线插补):该功能使用的是ELMO固有的PATH函数,由于前面已经提前定义了组,所以只需要调用固有的PATH函数即可运行该动作(也可参看附件视频文件)3.2轴任意规划曲线(蝶型曲线)八:ELMO的成功应用:1.军用履带式机器人:使用8个WHI20A系列驱动器,控制电机驱动履带运行,而G‐MAS通过TCP与工控机通讯,整个系统通过无线与主站通讯2.军用红外测量探头,使用2个HOR系列驱动器做俯仰与偏航控制3.警用排爆机器人,使用6‐8个WHI驱动器4.小型侦查机器人:使用4台HOR系列驱动器。
E L M O简明使用手册一次串口数据监控JV=20000;BG我们可以在命令输入框内输入命令实现控制。
输入:JV=30000;回车BG 回车电机以30000cnt/sec运转输入:ST 回车电机将停止提示:ST(相当于STOP)BG(相当于BEGIN)设定数字输入端口的功能我们可以设定INPUT 1为高电平,硬停止通过命令输入JV=30000;BG电机开始旋转,然后将INPUT 1拨动到高电平,电机停止,当INPUT 1拨回高电平后,电机恢复运转,因为硬停止,并不更改软件的运动状态。
但是,当我们使用“Soft Stop”时,当我们置INPUT 1为高电平后,软件也停止了,即使,再让INPUT 1为高电平后,电机也不能恢复运转。
referencing enabled/disabled所有命令:Command DescriptionPP[N]Define the parameters of the CAN or RS-232communicationCommand DescriptionAG[N]Analog gains arrayAS[N]Analog input offsets arrayBP[N]Brake parameterCA[N]Commutation parameters arrayCL[N]Current continuous limitations arrayEF[N]Encoder filter frequencyEM[N]ECAM parametersET[N]Entries for ECAM tableFF[N]Feed forwardFR[N]Follower ratioHM[N]Homing and capture modeKG[N]Gain scheduled controller parametersKI[N]PID integral terms arrayKP[N]PID proportional terms arrayKV[N]Advanced filter for speed loopXA[N]Extra parameters?(more)XP[N]Extra parametersCommand DescriptionBH Get a sample signal as hexadecimalRC Variables to record (two variables at each recordingsequence)RG Recording gap, in samples. Gap between consecutivedata recordings.RL Record lengthRP[N]Recorder parametersRR Recording on/offRV[N]Recorded variablesYM[N]Auxiliary sensor modulo countCommand DescriptionAB[N]Absolute encoder setting parametersID Read active currentUF[N]User float arrayUI[N]User integerWI[N]Metronome data, mainly for use by ComposerWS[N]Metronome data, mainly for use by ComposerZP[N]Integer wizard parametersZX[N]User program and auto-tuning temporary storage Command DescriptionAN[N]Read analog inputsIB[N]Bit-wise digital inputIF[N]Digital input filterIP Read all digital inputsOB[N]Bit-wise digital outputOC[N]Output CompareOL[N]Output LogicOP Set all digital outputsCommand DescriptionAC Acceleration, in counts per second2BG Begin motionBT Begin motion at defined timeDC Deceleration, in counts per second2limitation algorithmMF Motor fault: code for last motor-disable cause MS Motion status reportingPK Peak memorySN Serial numberSR Numerical, bit-coded Metronome statusTI[N]Temperature indications arrayVR Software (firmware) versionCommand DescriptionCC Compile programCP Clear application programDL Receive a program downloaded from host computer toMetronome. Can be used only in Composer software. HP Halt program executionKL Kill motion and stop program (like HP)LP[N]List parametersLS List programMI Mask interruptPS Program statusXC Continue program execution from current pointer,il[1]=7il[2]=7il[3]=7il[4]=7il[5]=7mo=1while(1)if(ib[1]==1)jv=20000 elseif(ib[2]==1)jv=-20000 elseif(ib[3]==1) jv=50000 elseif(ib[4]==1) jv=-50000 elseif(ib[0]==1) jv=an[1]*60000 endbgend。