第4章根轨迹分析法习题解答
- 格式:doc
- 大小:2.10 MB
- 文档页数:17
解⑴G(s)= 第四章线性系统的根轨迹法4-3单位反馈系统的开环传递函数如下,试概略绘出系统根轨迹。
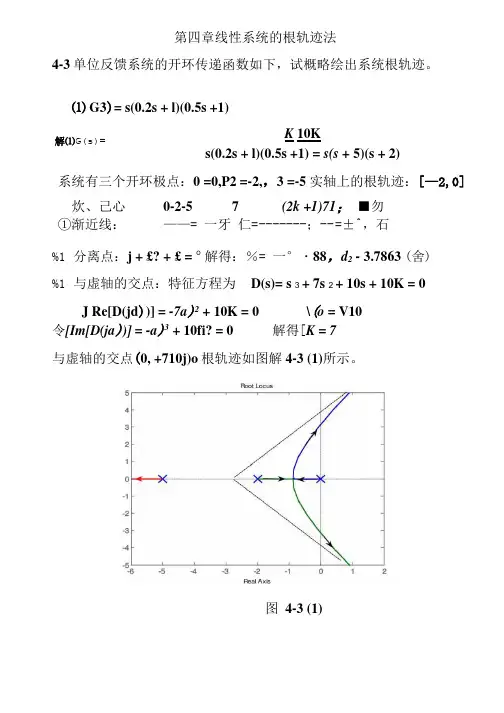
⑴ G3)= s(0.2s + l)(0.5s +1)K 10Ks(0.2s + l)(0.5s +1) = s(s + 5)(s + 2)系统有三个开环极点:0 =0,P2 =-2,,3 =-5 实轴上的根轨迹:[—2,0]炊、己心0-2-5 7 (2k +1)71;■勿①渐近线:——= 一牙仁= -------;-- =±^,石%1分离点:j + £? + £ = °解得:%= 一°・88,d2 - 3.7863 (舍)%1与虚轴的交点:特征方程为D(s)= s 3 + 7s 2 + 10s + 10K = 0 J Re[D(jd))] = -7a)2 + 10K = 0 \(o = V10令[Im[D(ja))] = -a)3 + 10fi? = 0 解得[K = 7与虚轴的交点(0, +710j)o根轨迹如图解4-3 (1)所示。
图4-3 (1)K*(s + 2)⑴ G(s) =⑴(s + i + 〃)(s + l 一以)解:①实轴上的根轨迹:(-00-2]1 1 1②分离点:d + 1 + j2+ d + l-j2 = d + 2解之得:=-4.23③起始角:° PI = 180。
+ 63.435 -90 =153.43°,另一起始角由对称性得:-153.43°。
图4-4 (1)4-5已知单位反馈系统的开环传递函数G(s),要求:(2)确定G(s)= “EK::、、产生纯虚根为±顶1的z值和K*值S十_LV八S 十)解(2)闭环特征方程:D(s) = $2 (s + 10)(s + 20) + K* (s + z)=s4 + 30s3 + 200s2 + K*s + K*Z = 0有:D(j(o) = 3 一200妒 + K*Z)+ - 30切3)=0刃4 -200妒+矿々=0令实、虚部分别等于零即:如•勿-30妒=0把刃=1 代入得:K*=30, z = 199/30。
第四章 根轨迹分析法习题4-2 单位回馈控制系统的开环传递函数1)(+=s K s G r,试用解析法绘出r K 从零变化到无穷时的死循环根轨迹图,并判断-2, j1, (-3+j2)是否在根轨迹上。
解:1-s 01s 0r=⇒=+=时,K2-s 02s 1r=⇒=+=时,K3-s 03s 2r=⇒=+=时,K……-2 在根轨迹上,(-3+j2),j1不在根轨迹上。
4-3 回馈控制系统的开环传递函数如下,0≥r K ,试画出各系统的根轨迹图。
(2) )4)(1()5.1()(+++=s s s s K s G r (3) 2)1()(+=s s K s G r , 解:(2)1)开环零、极点:p 1=0,p 2=-1,p 3=-4,z=,n=3,m=1 2)实轴上根轨迹段:(0,-1),(,-4) 3)根轨迹的渐近线:︒±=±=-+±=-=----=902)12(,75.12)5.1(410)2( ππϕσm n k aa夹角交点条渐近线4)分离点和会合点6.05.1141111-=+=++++d d d d d 试探法求得(3)2)实轴上根轨迹段:(0,-1),(-1,-∞) 3)根轨迹的渐近线:±=-+±=-=--=3)12(,323110)3( ππϕσm n k aa夹角交点条渐近线4)分离点和会合点310121-=⇒=++d d d 5)与虚轴交点:223++s s4-5 系统的开环传递函数为)1()2()(++=s s s K s G r ,(1) 画出系统的根轨迹,标出分离点和会合点;(2) 当增益r K 为何值时,复数特征根的实部为-2求出此根。
解: (1)1)开环零、极点:p 1=0,p 22)实轴上根轨迹段:(0,-13)分离点和会合点.3,586.02111121-=-=⇒+=++d d d d d123ss s s r2K-r211K rKj,202rr±==⇒=-s K K(2)系统特征方程为02)1(rr2=+++K s K s2j 2322122,1rr±-==-=+-=-s K Ka b ,,得:由4-6 单位回馈系统的前向信道函数为)3)(1()(++=s s s K s G r,为使死循环主导极点具有阻尼比5.0=ξ,试确定r K 的值。

第四章 根轨迹法习题及答案4-1 系统的开环传递函数为)4s )(2s )(1s (K )s (H )s (G *+++=试证明3j 1s 1+-=在根轨迹上,并求出相应的根轨迹增益*K 和开环增益K 。
解 若点1s 在根轨迹上,则点1s 应满足相角条件π)12()()(+±=∠k s H s G ,如图所示。
对于31j s +-=,由相角条件=∠)s (H )s (G 11-++-∠-)13j 1(0=++-∠-++-∠)43j 1()23j 1(ππππ-=---632满足相角条件,因此311j s +-=在根轨迹上。
将1s 代入幅值条件:143j 123j 113j 1K s H )s (G *11=++-⋅++-⋅++-=)(解出 : 12K *= , 238K K *==4-2 已知单位反馈系统的开环传递函数如下,试求参数b 从零变化到无穷大时的根轨迹方程,并写出2b =时系统的闭环传递函数。
(1))b s )(4s (02)s (G ++=(2))b s )(2s (s )b 2s (01)s (G +++=解 (1) )4j 2s )(4j 2s ()4s (b 20s 4s )4s (b )s (G 2-++++=+++=' 28s 6s 20)s (G 1)s (G )s (2++=+=Φ(2) )10s 2s (s )20s 2s (b )s (G 22++++='=)3j 1s )(3j 1s (s )19j 1s )(19j 1s (b -+++-+++ 40s 14s 4s )4s (10)s (G 1)s (G )s (23++++=+=Φ 4-3 已知单位反馈系统的开环传递函数)b s )(4s (s2)s (G ++=,试绘制参数b 从零变化到无穷大时的根轨迹,并写出s=-2这一点对应的闭环传递函数。
解 )6s (s )4s (b )s (G ++='根轨迹如图。
第四章 根轨迹法4-1试粗略画出对应反馈控制系统具有以下前向和反馈传递函数的根轨迹图: ()()()()s s H s s s K s G 6.01,01.01.02+=++=4-2 试粗略地画出反馈系统函数 ()()()()2411+-+=s s s Ks G 的根轨迹。
4-3 对应负反馈控制系统,其前向和反馈传递函数为 ()()()()1,42)1(2=+++=s H s s s s K s G 试粗略地画出系统的根轨迹。
4-4 对应正反馈重做习题4-3,试问从你的结果中得出什么结论?4-5 试画出具有以下前向和反馈传递函数的,正反馈系统根轨迹的粗略图。
()()()()1,4122=++=s H s s Ks G4-6 试确定反馈系统开环传递函数为 ()()()()()5284)2(2+++++=s s s s s s K s H s G 对应-∞<K<∞的根轨迹。
指明所有根轨迹上的相应特征。
4-7 设一负反馈系统,其开环传递函数 ()()()()()90020040)4(2++++=s s s s s K s H s G a) 画出根轨迹并表明根轨迹上全部特征值。
b) 增益值在一个什么样的范围内,系统才是稳定的? c) 画出系统的伯德图,并使其稳定性和不稳定性区域,与根轨迹图连系起来说明。
4-8 对应负反馈情况,重做习题4-7.4-9 对应如下的负反馈控制系统,粗略地作出根轨迹,并确定系统稳定下K 的范围。
()()()()1,41)6(=+++=s H s s s s K s G4-10 对应习题4-10图所示系统,根据以下条件,试确定导致系统稳定的正实数增益K 的范围:a) 具有负反馈的系统。
b) 具有正反馈的系统。
习题4-10图4-11 已知反馈系统的开环传递函数*()()(1)(2)K G s H s s s s =++ 试绘制系统的根轨迹图,详细列写根轨迹的计算过程,其中包括零点、极点、渐近线及与实轴交点,根轨迹分离点及与虚轴的交点、渐近线与实轴夹角。

1 已知系统的开环传递函数为()()()()21++=s s s ks H s G ,(1)试绘制该系统的概略根轨迹图;(2)利用根轨迹图分析系统稳定时K 的取值范围。
解:(1)根据绘制根轨迹的基本法则,可知: ① 实轴上的根轨迹区域为:(-∞,-2]和[0.-1]。
② 根轨迹总共有三条,其中二条将趋向无穷远处,其渐近线为: a 与实轴的交点坐标(a δ,0j )()()1321011-=-+-+=--=∑∑==mn zp n i mj ji a δb 与实轴的夹角:()⎪⎩⎪⎨⎧-=-===+=-+=1601180060318012180)12(0000k k k k m n k o a ϕ③ 根轨迹的分离点()()()()()(){}()423.0,578.121210211)(121-=-=⇒++-=⇒++-=⇒=+++=+s s dss s s d ds dk s s s k s s s k s G g g g舍去④ 根轨迹与虚轴的交点()()()()0,6,0,20210211)(1=±=⇒=+++⇒=⇒=+++=+g g gk k j j j j s s s k s G 对应的代入上式:令s ωωωωω系统稳定的充要条件为所有的闭环极点都要复平面的左半平面,根据以上绘制根轨迹的第4点,系统稳定时K 的取值范围为60<<K 。
2 已知系统的开环传递函数为)3)(2()5()(*+++=s s s s K s G ,(1)试绘制该系统的概略根轨迹图;(2)利用根轨迹图分析系统稳定时K*的取值范围。
(1)根据根轨迹的绘制法则,可知:① 实轴上的根轨迹:[]3,5--, []0,2--1-2j② 渐近线: ⎪⎪⎩⎪⎪⎨⎧±=+==----=22)12(02)5(320ππϕσk a a③ 分离点: 5131211+=++++d d d d 用试探法可得886.0-=d 。
四 根轨迹分析法2-4-1 设系统的开环零、极点分布如题2-4-1图所示,试绘制相应的根轨迹草图。
题2-4-1图【解】:题2-4-1解图2-4-2 设负反馈系统的开环传递函数分别如下: (1))1)(5.0)(2.0()(+++=s s s Ks G (2))12()1()(++=s s s K s G(3))52()2()(2+++=s s s K s G (4))136)(5)(1()(2++++=s s s s Ks G试绘制K 由+∞→0变化的闭环根轨迹图。
【解】:(1)系统有三个开环极点 1,5.0,2.0321-=--=--=-p p p 。
① 0,3==m n ,有三条根轨迹,均趋于无穷远。
② 实轴上的根轨迹在区间]][2.0,5.01,(----∞。
③ 渐近线 ()()2,1,0180,6031801257.0315.02.0=︒︒±=︒⋅+=-=---=-k k θσ ④ 分离点。
方法一 由0)()()()(='-'s Q s P s Q s P 得33.0,8.008.04.332,12--=⇒=++s s s8.01-=s 不在根轨迹上,舍去。
分离点为33.0-。
分离点处K 值为 014.0)()(33.0=-=-=s s P s Q K方法二 特征方程为:01.08.07.123=++++K s s s重合点处特征方程:0)2()2()()(22232=+++++=++b a s a ab s b a s b s a s 令各项系数对应相等求出重合点坐标和重合点处增益取值。
⑤ 根轨迹与虚轴的交点。
系统的特征方程为01.08.07.1)(23=++++=K s s s s D方法一 令ωj s +,得⎪⎩⎪⎨⎧=±=⇒⎪⎩⎪⎨⎧=++-=+-⇒=+++--26.18.001.07.108.001.08.07.12323K K K j j ωωωωωωω 方法二 将特征方程列劳斯表为Ks K s Ks s ++-+1.07.11.08.01.07.18.010123令1s 行等于0,得26.1=K 。
习题4.1 已知下列负反馈的开环传递函数,应画零度根轨迹的是:(A)A *(2)(1)K s s s -+B *(1)(5)K s s s -+C *2(31)K s s s -+D *(1)(2)K s s s --4.2 若两个系统的根轨迹相同,则有相同的:(A)A 闭环零点和极点B 开环零点C 闭环极点D 阶跃响应4.3 己知单位负反馈控制系统的开环传递函数为*()()(6)(3)K G s H s s s s =++(1) 绘制系统的根轨迹图(*0K <<∞);(2) 求系统临界稳定时的*K 值与系统的闭环极点。
解:系统有三个开环极点分别为10p =、23p =-、36p =-。
系统有3条根轨迹分支,分别起始于开环极点,并沿渐进线终止于无穷远。
实轴上的根轨迹区段为(],6-∞-、[]3,0-。
根轨迹的渐近线与实轴交点和夹角分别为()()36 33a σ-+-==-,() (0)321 (1)3 (2)3a k k k k πϕππ⎧=⎪+⎪===⎨⎪⎪-=⎩求分离点方程为111036d d d ++=++ 经整理得2660d d ++=,解方程得到1 4.732d =-、2 1.268d =-。
显然分离点位于实轴上[]3,0-间,故取2 1.268d =-。
求根轨迹与虚轴交点,系统闭环特征方程为32*()9180D s s s s K =+++=令j s ω=,然后代入特征方程中,令实部与虚部方程为零,则有[][]2*3Re (j )(j )190Im (j )(j )1180G H K G H ωωωωωωω⎧+=-+=⎪⎨+=-+=⎪⎩ 解之得 *00K ω=⎧⎨=⎩、*162K ω⎧=±⎪⎨=⎪⎩显然第一组解是根轨迹的起点,故舍去。
根轨迹与虚轴的交点为s =±,对应的根轨迹增益*162K =为临界根轨迹增益。
根轨迹与虚轴的交点为临界稳定的2个闭环极点,第三个闭环极点可由根之和法则求得1233036λλλλ--=++=+解之得39λ=-。
第4章 根轨迹法4-1 根轨迹法适用于哪类系统的分析?答:根轨迹法适用于分析高阶系统。
4-2 为什么可以利用系统开环零点和开环极点绘制闭环系统的根轨迹?答:绘制根轨迹的依据是幅角条件,而系统的幅角关系为式中:;为开环有限零点-z i 到s 的矢量幅角;为开环极点-p j 到s 的矢量幅角。
由此可知,可以利用系统开环零点和开环极点来绘制闭环系统的根轨迹。
4-3 绘制根轨迹的依据是什么?答:绘制根轨迹的依据是幅角条件,即幅角的和总等于。
4-4 为什么说幅角条件是绘制根轨迹的充分必要条件?答:由根轨迹的定义可知,根轨迹由特征方程式的幅值条件和幅角条件决定,但因为K g 在0→∞范围内连续变化,总有一个K g 能满足幅值条件,所以,绘制根轨迹的依据是幅角条件。
4-5 系统开环零、极点对根轨迹形状有什么影响?答:(1)增加开环零点将使系统的根轨迹向左弯曲,并在趋向于附加零点的方向发生变形。
(2)增加开环极点将使系统的根轨迹向右弯曲,使对应同一个K g值的复数极点的实数部分和虚数部分数值减小,从而系统的调节时间加长,振荡频率减小。
4-6 求下列各开环传递函数所对应的负反馈系统的根轨迹。
解:(1)①起点:两个开环极点为-p1=-1,-p2=-2;终点:系统有一个开环有限零点为-z=-3。
②实轴上的根轨迹区间为(-∞,-3],[-2,-1]。
③根轨迹的分离点、会合点计算。
即因为根轨迹在(-∞,-3]和[-2,-1]上,所以,分离点为-1.58,会合点为-4.42。
根轨迹如图4-1所示。
图4-1 题4-6(1)根轨迹图(2)①起点:三个开环极点-p1=0,-p2=-3,-p3=-2;终点:系统有一个开环有限零点-z=-5。
②实轴上根轨迹区间为[-5,-3],[-2,0]。
③渐近线倾角及交点计算。
由公式求得根轨迹的渐近线倾角和渐近线与实轴的交点为④求分离点N'(s)D(s)-D'(s)N(s)=0。
第四章(答案)部门: xxx时间: xxx整理范文,仅供参考,可下载自行编辑第六次作业注:1、本次作业中根轨迹绘制部分要求有明确的步骤和文字说明。
2、本子上作业和程序作业分别打分,然后统计到成绩记录本中。
<即本次作业由两个成绩组成)4.2解:<1)渐近性与实轴的夹角为:渐近线与实轴的交点为:<2)离开复极点的出射角为:,,<3)闭环特征方程为:,其劳斯阵列为1 52令行为0,得=10,得两个虚根为4.3G(s>=,k0零极点分布图:根轨迹图:(1)令N(s>=s+2,D(s>=s+2s+3代入N’(s>D(s>-N(s>D’(s>=0 得:ss-0.27 , s-3.73实轴上根轨迹区间是:<-,-2所以,s=-2-=-3.73为会合点<舍去s=-3.73)会合点处的根轨迹增益:K=-=5.46(2> =180+(-P+Z>-(-P+P>=180+54.7-90=144.7由对称性可知=-=-144.7(3>方法一:利用圆的数学表达式根轨迹方程为1+G(s>=0 ,即:s所以:s= (*>设s=x+jy ,由(*>可得:由上式得:(x+2>+y=3所以,不在负实轴上的根轨迹是圆周上的一部分。
方法二:利用根轨迹的相角条件设s=x+jy根据根轨迹的相角条件:得到:tan-[(tan>+(tan>]=化简得:(x+2>+y=3所以,不在负实轴上的根轨迹是圆周上的一部分。
4.4解:<1)系统的开环极点为,开环零点为-1,由规则知实轴上的根轨迹区域为<2)令N(s>=s+1,D(s>=则由,得,解得所以,根轨迹与实轴的交点为<3)复极点:出射角为:45°,-45°4.5G(s>=,-由G(s>得出系统的三个开环极点为:s=-1 , s=-3 , s=-6I 当时,根据180等相角根轨迹规则,有:(1> 实轴上的根轨迹区域为:<-,-6][-3,-1](2> 渐近线与实轴的交点: -===角度为:==代入N’(s>D(s>-N(s>D’(s>=0 得:3ss-1.88, s-4.79因为:实轴上的根轨迹区域为:<-,-6][-3,-1]所以,s=-1.88是分离点<舍去s=-4.79)(4> 分离点处的根轨迹增益值为: K==4.06II当时,根据0等相角根轨迹规则,有:(1>实轴上的根轨迹区域为:[-6,-3][-1,+>(2> 渐近线与实轴的交点: -===角度为:==代入N’(s>D(s>-N(s>D’(s>=0 得:3ss-1.88, s-4.79因为:实轴上的根轨迹区域为:[-6,-3][-1,+>所以,s=-4.79是分离点(舍去s=-1.88>(4> 分离点处的根轨迹增益值为: K==-8.214.7解:1.(1)开环极点为0,-1,-1(2)渐近线有三条,倾角60,180,-60,与实轴的交点 -2/3(3)实轴上的分离点为-1/3(4)出射角180,0,-180(5)与虚轴交点<1)实轴上的根轨迹为<2)渐近线倾角为120,-120,0,与实轴的交点-2/3 <3)分离点为-1/3<4)出射角0,0,1802.(1)极点:-2,-1+j,-1-j(2)渐近线倾角:60,180,-60;与实轴的交点:-4/3(3)根轨迹与虚轴的交点为:(4)出射角:45,180,-45<1)实轴上的根轨迹区为<2)渐近线倾角为120,0,-120;与实轴的交点为:-4/3 <3)出射角为 135,0,-1353.时(1)极点0,-1,-4,零点-5,交点0(2)渐近线倾角90,-90(3)分离点-0.5(4)出射角180,0,180<1)实轴上的根轨迹为<2)渐近线倾角0,,与实轴的交点为0<3)出射角0,180,0 <4)分离会合点 -3.26,-6.264.(1)极点0,0,-4,零点-2-2j,-2-2j(2)渐近线1条,倾角180°(3)出射角90°,-90°,180°,入射角-45,45<1)实轴上的跟轨迹区域为<2)分离<会合)点:0,-2.4163(3> 出射角0,180,0,入射角5.(1)极点,,零点-2.5(2)渐近线倾角60,180,60,交点-7/6(3)分离会合点-3(4)出射角60,-60,143,-143,入射角180与虚轴的交点<1)实轴上的根轨迹为<2)渐近线为0,120,-120<3)分离点为-1.13<4)出射角为120,-120,36.87,-36.87,入射角0 <5)与虚轴交于0点6.(1)极点0,-1,,零点-1(2)渐近线60,180,-60,交点-4/3(3)出射角30,-30,180(4)与虚轴的交点,0<1)实轴上的根轨迹区域为(2>渐近线倾角为0,120,-120,交点-4/3 <3)出射角为0,210,-210 入射角0<4)与虚轴交点为04.9令=-1则:s(2s+1>=a(s-1>所以:整理得: (a>令K’=(K’为等效根轨迹增益>所以,等效开环传递函数为:G’(s>=,(1>等效开环零点:-ze=1等效开环极点:-pe=0 , -pe=(2>实轴上的根轨迹区域为:[,-0][1,+>(3>渐近线:-==角度为:=0(4>分离点和会合点:N(s>=s-1,D(s>=代入N’(s>D(s>-N(s>D’(s>=0 得:s=, s=所以,s=是会合点,s=是分离点。
第四章 根轨迹分析法学习要点1根轨迹的概念;2 根轨迹方程及幅值条件与相角条件的应用; 3根轨迹绘制法则与步骤;4 应用根轨迹分析参数变化对系统性能的影响。
思考与习题祥解\题 思考与总结下述问题。
(1)根轨迹的概念、根轨迹分析的意义与作用。
(2)在绘制根轨迹时,如何运用幅值条件与相角条件 (3)归纳常规根轨迹与广义根轨迹的区别与应用条件。
(4)总结增加开环零、极点对系统根轨迹的影响,归纳系统需要增加开环零、极点的情况。
答:(1)当系统某一参数发生变化时,闭环特征方程式的特征根在S 复平面移动形成的轨线称为根轨迹。
根轨迹反映系统闭环特征根随参数变化的走向与分布。
根轨迹法研究当系统的某一参数发生变化时,如何根据系统已知的开环传递函数的零极点,来确定系统的闭环特征根的移动轨迹。
因此, 对于高阶系统,不必求解微分方程,通过根轨迹便可以直观地分析系统参数对系统动态性能的影响。
应用根轨迹可以直观地分析参数变化对系统动态性能的影响,以及要满足系统动态要求,应如何配置系统的开环零极点,获得期望的根轨迹走向与分布。
(2)根轨迹上的点是闭环特征方程式的根。
根轨迹方程可由闭环特征方程式得到,且为复数方程。
可以分解为幅值条件与相角条件。
运用相角条件可以确定S 复平面上的点是否在根轨迹上;运用幅值条件可以确定根轨迹上的点对应的参数值。
(3)归纳常规根轨迹与广义根轨迹的区别与应用条件。
|考察开环放大系数或根轨迹增益变化时得到的闭环特征根移动轨迹称为常规根轨迹。
除开环放大系数或根轨迹增益变化之外的根轨迹称为广义根轨迹,如系统的参数根轨迹、正反馈系统根轨迹和滞后系统根轨迹等。
绘制参数根轨迹须通过闭环特征方程式等效变换,将要考察的参数变换到开环传递函数中开环放大系数或根轨迹增益的位置上,才可应用根轨迹绘制规则绘制参数变化时的根轨迹图。
正反馈系统的闭环特征方程0)()(1=-s H s G 与负反馈系统的闭环特征方程1()()0G s H s +=存在一个符号差别。
因此,正反馈系统的幅值条件与负反馈系统的幅值条件一致,而正反馈系统的相角条件与负反馈系统的相角条件反向。
负反馈系统的相角条件(ππk 2+)是180根轨迹,正反馈系统的相角条件(πk 20+)是0根轨迹。
因此,绘制正反馈系统的根轨迹时,凡是与相角有关的绘制法则, 如实轴上的根轨迹,根轨迹渐近线与实轴的夹角, 根轨迹出射角和入射角等等,都要变ππk 2+角度为πk 20+。
(4)由于开环零、极点的分布直接影响闭环根轨迹的形状和走向,所以增加开环零、极点将使根轨迹的形状和走向发生改变,从而使系统性能也随之发生变化。
一般地,增加合适的开环零点,可使闭环系统的根轨迹产生向左变化的趋势,从而改善系统的稳定性和快速性。
增加开环极点时,增加了根轨迹的条数,改变了根轨迹渐近线的方向,可使闭环系统的根轨迹产生向右变化的趋势,削弱系统的稳定性和快速性。
增加开环零极点,都将改变根轨迹渐近线与实轴的交点与夹角,可能改变根轨迹在实轴上的分布。
如果系统期望主导极点在根轨迹左侧时,可通过增加开环零点(超前校正),使闭环系统的根轨迹向左弯曲,通过期望主导极点,满足系统动态要求;如果系统期望主导极点在根轨迹右侧时,可通过增加开环极点(滞后校正),使闭环系统的根轨迹向右弯曲,通过期望主导极点,满足系统动态要求。
题,试绘制各系统的根轨迹图。
(1)(2))4()2()()(2++=s s Ks H s G(3)3)2()()(+=s Ks H s G解: (11)起点:三个开环极点 3,4,2,0321=-=--=-=-n p p p 。
2)终点:无有限开环零点 0=m 。
3)实轴上 ]02[]4,、,(--∞- 为根轨迹区间。
4)根轨迹渐近线00180,6003)12(18020342±=-+±=-=-+-=-k A θσ 5) 求分离点 \155.33322845.03322 08123 0)()()()(212''-≈--=-≈+-==++=-s s s s s A s B s B s A 解得:得:因为实轴上的根轨迹 在]02[]4,、,(--∞- 区间内,所以分离点为1s 。
6) 根轨迹与虚轴的交点系统的闭环特征方程为: 08623=+++K s s s造劳斯表:KS K S KS S 0123068681-为使S 1 行为零,应有48=K由S 2 行得辅助方程: 04862=+s 解得: 83.28j j s ±≈±= 根轨迹如图所示。
48=48=*图 题(1)根轨迹(21)起点:三个开环极点 3,4,2,2321=-=--=--=-n p p p 。
2)终点:无有限开环零点 0=m 。
3)实轴上 ]4-∞-,( 为根轨迹区间。
4)根轨迹渐近线00180,6003)12(1803803422±=-+±=-=-++-=-k A θσ 5) 求分离点因为实轴上的根轨迹 在]4-∞-,( 区间内,且-2为系统开环重极点,所以分离点为1s 。
6) 根轨迹与虚轴的交点系统的闭环特征方程为: 01620823=++++K s s s将ωj 代人s ,整理得:0)20()168(32=-++-ωωωj K 由此可得下列联立方程:)20(016822=-=+-ωωωK解得: 144,52=±=K ω 根轨迹如图所示。
144=144=图 题(2)根轨迹.(31)起点:三个开环重极点 3,2321=-=-=-=-n p p p 。
2)终点:无有限开环零点 0=m ,因此,根轨迹分成3条,它们均由 -2 出发趋向无限远点。
3)实轴上 ]2-∞-,( 为根轨迹区间。
4)根轨迹渐近线00180,6003)12(18023222±=-+±=-=-++-=-k A θσ5) 求分离点实轴上的分离点为-2。
!6) 根轨迹与虚轴的交点系统的闭环特征方程为: 0812623=++++K s s s将ωj 代人s ,整理得:0)12()86(32=-+++-ωωωj K 由此可得下列联立方程:)12(08622=-=+-ωωωK解得: 64,32=±=K ω可见,根轨迹与其渐近线重合。
根轨迹如图所示。
64=K 64=K图 题(3)根轨迹题 已知负反馈控制系统的开环传递函数为(1))4)(2()3()()(+++=s s s K s H s G,(2))3()()(+=s K s H s G(3解:(11)起点:两个开环极点 2,4,221=-=--=-n p p 。
2)终点:有一个有限开环零点1,3=-=-m z 。
3)实轴上 ]2,3[]4---∞-、,( 为根轨迹区间。
4)根轨迹渐近线018012)12(180312342=-+±=-=--+-=-k A θσ即:系统根轨迹分成两条,一条从) 0 2 (,-点出发,终止于有限开环零点) 0 3 (,-,另一条从) 0 4 (,-点出发,沿正实轴方向趋于无限远点。
根轨迹如图所示。
【图 题(1)根轨迹(21)起点:三个开环极点 3,4,2,0321=-=--=-=-n p p p 。
2)终点:一个有限开环零点13=-=-m z ,。
3)实轴上 ]0 2[ ]3 4[,、,--- 为根轨迹区间。
4)根轨迹渐近线00913)12(18023133420±=-+±=-=--++-=-k A θσ5) 求分离点 |2463152s 0)()()()(23''=+++=-s s s A s B s B s A 得:因为实轴上的分离点应该在 ] 0 2 [,- 区间内,利用凑试法可得1.11-≈s 。
根轨迹如图所示。
图 题(2)根轨迹(31)起点:三个开环极点 3,1,1,0321=---=-+-=-=-n j p j p p 。
2)终点:一个有限开环零点12=-=-m z ,。
3)实轴上 ]02[,- 为根轨迹区间。
?4)根轨迹渐近线0913)12(1800132110±=-+±==---+++-=-k j j A θσ)()( 即渐近线为虚轴。
5) 根轨迹的出射角20000011110 0)4590135(180 )(180 ==-+-=--=∑∑-==θθϕθθ故得:由n j mi i j l 根轨迹如图所示。
图 题(3)题 有一个开环传递函数为)15.0()1()()(2++=s s s K s H s G 的负反馈系统,试绘制系统的根轨迹。
$解: 1)起点:三个开环极点 3,2,0321=-=-=-=-n p p p 。
2)终点:一个有限开环零点11=-=-m z ,。
3)实轴上 ] 1 2[--, 为根轨迹区间。
4)根轨迹渐近线00913)12(18021131-200±=-+±=-=-++-=-k A θσ根轨迹如图所示。
图 题根轨迹题 已知负反馈控制系统的开环传递函数为)4)(2)(1()()(+++=s s s Ks H s G ,试证明31j s +-=是该系统根轨迹上的一点,并求出相应的K 值。
解: 系统有三个开环极点,无开环有限零点。
开环零极点与31j s +-=点的分布如图所示。
;图 题 系统开环零极点分布1) 若s 为根轨迹上的点,则必满足相角条件,即:∵ 0000321180306090)()()(=++=+∠++∠++∠P s P s P s ∴ s 是根轨迹上的一点。
2) 求与s 相应的K 值。
根据幅值条件: 12132231))()((11321=⨯⨯=+++=P s P s P s K 所以 12=K,设负反馈系统的开环传递函数为)4()6()()(++=s s s K s H s G ,试证明该系统根轨迹为一圆形,并指出其圆心和半径。
证明: 设s 为系统根轨迹上的一点,则根据相角条件有: 0180)4()()6 180)4()6(=++∠-+∠-++∠+==+∠-∠-+∠ωσωσωσωσj j j j s s s s (可得令即:018046=+--+σωσωσωarctg arctgarctg整理得:418060++=-+σωσωσωarctgarctg arctg 利用反正切公式,可得:41806160++=⋅++-+σωσωσωσωσωarctg arctg等式两端取正切:4616+=⋅++-+σωσωσωσωσω整理得:12)6(22=++ωσ可知,上式为一圆的方程,圆心)0 6(,-,半径为32。
:题试用K 值,并求出此时闭环系统的特征根。
解: 系统的根轨迹如图所示。