第四章 根轨迹分析法3_2
- 格式:ppt
- 大小:373.50 KB
- 文档页数:41
《根轨迹分析法》课件1. 课件简介根轨迹分析法是一种用于分析和设计反馈控制系统的方法,通过绘制系统的根轨迹来了解系统在不同参数下的稳定性和动态性能。
本课件将介绍根轨迹分析法的基本概念、方法和应用。
2. 课件内容2.1 根轨迹分析法的基本概念2.1.1 根轨迹的定义根轨迹是指在系统参数变化范围内,使闭环系统稳定的闭环极点轨迹。
2.1.2 根轨迹的性质(1)根轨迹是闭环极点在复平面上的轨迹,反映了闭环系统的稳定性。
(2)根轨迹的形状由系统开环传递函数的极点和零点决定。
(3)根轨迹的分布与系统参数有关,通过改变参数可以改变系统的稳定性和动态性能。
2.2 根轨迹分析法的方法2.2.1 绘制根轨迹的基本步骤(1)确定系统开环传递函数。
(2)画出开环传递函数的极点和零点。
(3)根据系统参数的变化,绘制出根轨迹。
(4)分析根轨迹的形状,判断闭环系统的稳定性。
2.2.2 根轨迹的绘制技巧(1)利用软件工具,如MATLAB,自动绘制根轨迹。
(2)手动绘制根轨迹时,注意利用对称性和周期性简化绘制过程。
2.3 根轨迹分析法的应用2.3.1 设计控制器通过分析根轨迹,可以确定控制器参数,使闭环系统具有所需的稳定性和动态性能。
2.3.2 系统优化根轨迹分析法可以帮助我们找到系统参数的最佳组合,从而优化系统的性能。
2.3.3 故障诊断分析根轨迹可以帮助我们发现系统中的故障,为故障诊断提供依据。
3. 课件总结本课件介绍了根轨迹分析法的基本概念、方法和应用。
通过学习本课件,您可以了解根轨迹分析法在控制系统设计和分析中的重要性,并掌握绘制根轨迹的基本方法。
希望这有助于您在实际工作中更好地应用根轨迹分析法。
科学性:1. 内容准确:课件内容基于控制理论的基本原理,准确地介绍了根轨迹分析法的概念、方法和应用。
2. 逻辑清晰:课件从基本概念入手,逐步深入到方法介绍和应用实例,逻辑结构清晰,易于理解。
3. 实例典型:课件中提供了控制系统的实例,帮助学习者更好地理解根轨迹分析法的应用场景。

第四章根轨迹分析法一、主要内容<1)根轨迹法的基本概念<2)绘制180o根轨迹的基本法则<3)绘制0o根轨迹的基本法则<4)参变量系统的根轨迹<5)非最小相位系统的根轨迹<6)控制系统的根轨迹分析二、基本要求<1)理解根轨迹法、根轨迹、根轨迹方程、180o根轨迹和0o根轨迹等概念。
<2)掌握180o根轨迹的绘制方法,理解和熟记根轨迹的绘制法则,会用幅值方程求对应的<或)值。
<3)了解闭环零、极点分布和系统阶跃响应的定性关系,掌握系统根轨迹分析的基本思路。
<4)掌握0o根轨迹、参变量系统根轨迹和非最小相位系统根轨迹绘制的方法。
三、内容提要1、根轨迹法的基本概念<1)根轨迹:当系统开环传递函数中某参数<如根轨迹增益)在某一范围内<如)连续变化时,闭环特征根在S平面上移动的轨迹,称为根轨迹。
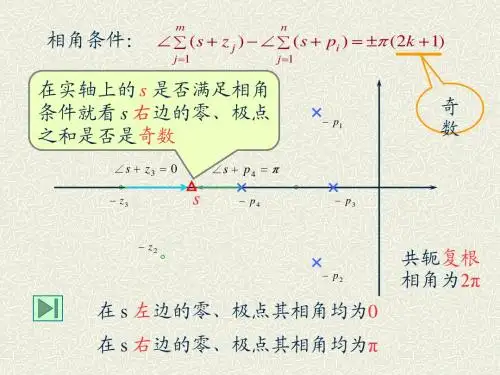
b5E2RGbCAP<2)根轨迹方程幅值方程:相角方程:。
相角方程是根轨迹的充分必要条件,而幅值方程的作用主要用来确定对应点的增益。
2、绘制180o根轨迹的基本法则法则1:根轨迹的起点和终点根轨迹起始于系统的开环极点<包括重极点),m条根轨迹终止于开环零点,条根轨迹分支终止于无穷远处。
法则2:根轨迹的连续性和分支数根轨迹具有连续性,且对称于实轴。
法则3:根轨迹的分支数根轨迹的分支数等于,即系统的阶数。
法则4:根轨迹的渐近线有条渐近线,渐近线与实轴正方向的夹角为:,渐近线与实轴的交点为:法则5:实轴上根轨迹的分布实轴上某区域,若其右边的开环零点和开环极点个数之和为奇数,则该区域必是根轨迹。
法则6:根轨迹的分离<会合)点根轨迹的分离<会合)点实质上闭环特征方程的重根,因而可以用求解方程式重根的方法来确定其在复平面上的位置。
p1EanqFDPw 设系统闭环特征方程为:满足以下任何一个方程,且保证为正实数的解,即是根轨迹的分离<会合)点。
第4章 根轨迹分析法通过对控制系统的时域分析,我们知道,系统的稳定性和输出响应中的瞬态分量都由系统闭环特征方程的特征根(闭环传递函数的极点)所决定。
你可能有问题:当系统的某个参数发生变化时,特征根会随之在复平面上移动,系统的性能也就会发生变化。
是的,确实如此!因此,我们可以根据特征根在复平面上的分布来分析系统的性能,也可以根据系统的性能指标要求来确定满足该指标的特征根的位置,并进一步确定相关的系统参数。
这就是根轨迹分析的意义。
s s 鉴于高阶特征方程的求解具有较大的难度,1948年伊文思(W••R••Evans)提出了一种求闭环系统特征根的简便图解法,称为根轨迹法。
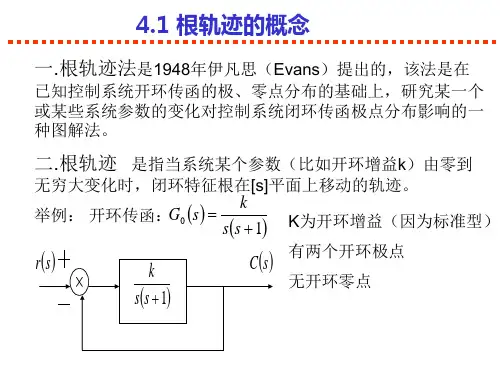
4.1 根轨迹的基本概念根轨迹法主要研究当系统的某一参数发生变化时,如何根据系统已知的开环传递函数的零极点,来确定系统的闭环特征根的移动轨迹。
下面我们可以结合具体的例子来说明根轨迹的含义。
)2()(+=s s Ks G 设控制系统的结构如图4.1所示,图中,,系统的开环传递函数为1)(=s H图4.1 系统结构图)2()()(+=s s Ks H s GK 其中,为开环传递函数零极点形式的放大系数,也称为根轨迹增益。
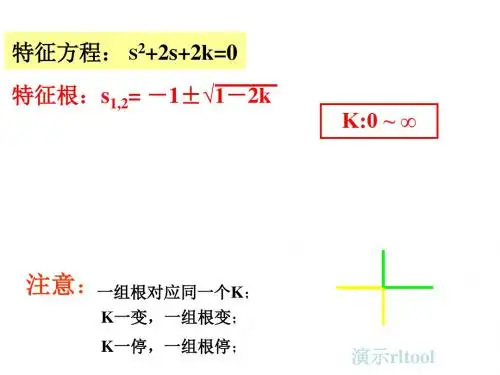
系统的闭环传递函数为Ks s Ks R s C ++=2)()(2 则闭环特征方程为022=++K s sK s −+−=111K s −−−=112可以解出该方程的根为 ,可见,、是随参数1s 2s K 的变化而变化的。
改变K 值时,特征根、的变化值如表4.1所示,在平面上的轨迹变化如图4.2所示。
图中的粗实线就称为系统的根轨迹,根轨迹上的箭头方向表示1s 2s s ∞→K 时,闭环极点的变化方向,标注的数据代表与闭环极点位置相应的开环增益K 的数值。
表4.1 S S 12K 0 0 -2 0.5 -0.29 -1.7071 -1 -1图4.2 闭环特征根的轨迹实际上,图中的根轨迹是由两条分支组成的:①当0=K 时,闭环特征根、与开环极点重合,即开环极点为根轨迹的起点。