第三章 正运动学方程
- 格式:ppt
- 大小:787.50 KB
- 文档页数:38
第三章机器人运动学机器人运动学是研究机器人如何在二维或三维空间中进行运动的学科。
它涉及到机器人的轨迹规划、运动控制和路径规划等重要内容。
本章将介绍机器人运动学的基本概念和常用模型,帮助读者全面了解机器人的运动规律和控制原理。
1. 机器人运动学的基本概念机器人运动学是研究机器人位置和姿态变化的学科,包括正运动学和逆运动学两个方面。
正运动学研究机器人的末端执行器的位置和姿态如何由关节变量确定;逆运动学则研究机器人如何通过末端执行器的位置和姿态来确定关节变量的值。
机器人的运动学建模一般采用DH(Denavit-Hartenberg)参数表示方法。
DH 参数是由Denavit和Hartenberg提出的一种机器人坐标系的选择和旋转轴的确定方法。
通过定义一系列关节坐标系,建立起机器人的坐标系链,并确定各个关节的旋转轴和约定的方向,可以方便地描述机器人的运动学特性。
2. 机器人正运动学机器人正运动学是研究机器人末端执行器位置和姿态如何由关节变量确定的问题。
在机器人的正运动学中,常用的方法有几何法和代数法。
2.1 几何法几何法是一种较为直观的方法,通过对机器人各个关节坐标系的位置和旋转进行推导,得到机器人末端执行器的位置和姿态。
几何法适用于无约束和无外力干扰的情况,可以简单快速地推导出机器人的正运动学方程。
2.2 代数法代数法是一种基于运动学链的代数运算的方法,通过DH参数建立起机器人的坐标系链,并通过矩阵运算推导出机器人的正运动学方程。
代数法在机器人正运动学的推导和计算过程中更具有普适性和灵活性。
3. 机器人逆运动学机器人逆运动学是研究机器人如何通过末端执行器的位置和姿态来确定关节变量的值的问题。
机器人逆运动学在机器人运动规划和路径控制中起到重要的作用。
机器人逆运动学的求解一般采用迭代方法,通过迭代计算来逼近解析解,实现对机器人关节变量的求解。
逆运动学的求解过程中可能会出现奇异点和多解的情况,需要通过约束条件和优化方法来处理。
运动学方程及应用运动学是物理学中研究物体运动的学科,是研究物体位置、速度和加速度与时间之间关系的一门学科。
运动学方程是描述物体运动状态的方程,通过运动学方程可以计算物体的位移、速度和加速度等参数,进而揭示物体运动的规律和特点。
运动学方程及其应用在物理学、工程学等领域具有重要的意义。
一维运动学方程是研究物体沿着一条直线运动时的方程。
其中最基本的方程是位移-时间关系方程,即x = x0 + v0t + (1/2)at^2。
这里x0表示起始位置,v0表示起始速度,t表示时间,a表示加速度。
该方程表达了物体的位移与时间的关系,可以计算在给定初始条件下物体的具体位置。
在应用中,运动学方程可以用于解决诸如自由落体、匀速直线运动、匀加速直线运动等问题。
例如,可以利用x = x0 + v0t + (1/2)at^2来计算一个物体自由落体的高度。
如果物体自由落体时没有起始速度,即v0为0,方程简化为x = (1/2)gt^2,其中g为重力加速度。
通过该方程,可以计算物体在任意时间下的高度,从而揭示物体自由落体运动的规律。
另一方面,运动学方程也可用于解决匀速直线运动的问题。
在匀速直线运动中,物体的加速度为0,所以运动学方程可以写成x = x0 + v0t。
这里x0表示起始位置,v0表示起始速度,t表示时间。
通过该方程,可以计算物体在匀速直线运动中的位置。
运动学方程在匀加速直线运动中的应用也非常广泛。
在匀加速直线运动中,物体的加速度是恒定的,所以运动学方程可以写成x = x0 + v0t + (1/2)at^2。
这里x0表示起始位置,v0表示起始速度,t表示时间,a表示加速度。
通过该方程,可以计算物体在匀加速直线运动中的位置。
除了一维运动之外,运动学方程还可以推广到二维和三维运动中。
在二维和三维运动中,物体在平面或空间中的位置可以用矢量表示。
对于二维运动,可以用位矢r = xi + yj来表示物体的位置,其中i和j分别是x轴和y轴的单位矢量。
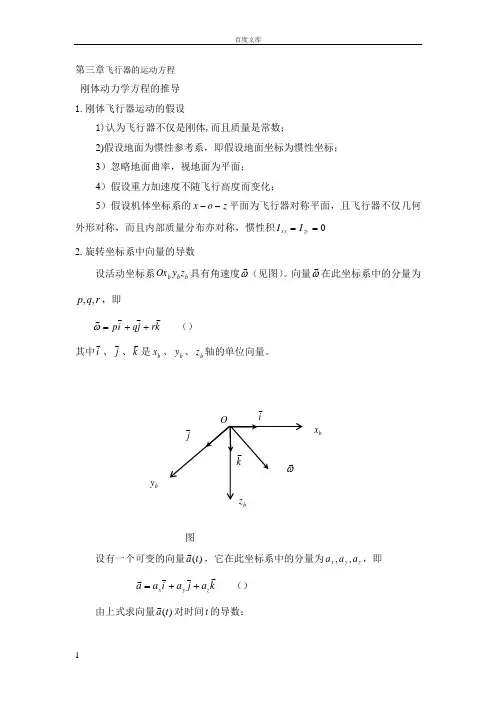
第三章飞行器的运动方程 刚体动力学方程的推导 1.刚体飞行器运动的假设1)认为飞行器不仅是刚体,而且质量是常数;2)假设地面为惯性参考系,即假设地面坐标为惯性坐标; 3)忽略地面曲率,视地面为平面; 4)假设重力加速度不随飞行高度而变化;5)假设机体坐标系的z o x --平面为飞行器对称平面,且飞行器不仅几何外形对称,而且内部质量分布亦对称,惯性积0==zy xy I I 2.旋转坐标系中向量的导数设活动坐标系b b b z y Ox 具有角速度ω (见图)。
向量ω在此坐标系中的分量为r q p ,,,即k r j q i p++=ω () 其中i 、j、k 是b x 、b y 、b z 轴的单位向量。
图设有一个可变的向量)(t a,它在此坐标系中的分量为z y x a a a ,,,即k a j a i a a z y x++= ()由上式求向量)(t a对时间t 的导数:b xωb yb zOijkdtkd a dt j d a dt i d a k dt da j dt da i dt da dt a d z y x z y x +++++= () 从理论力学知,当一个刚体绕定点以角速度ω旋转时,刚体上任何一点P的速度为r dt r d⨯=ω () 其中r是从O 点到P 点的向径。
现在,把单位向量i看作是活动坐标系中一点P 的向径,于是可得:i dtid⨯=ω () 同理可得: j dtj d⨯=ω () k dtkd⨯=ω () 将式()、()及()代入式()中,可得:)(k a j a i a k dtda j dt da i dt da dt a d z y x z y x ++⨯+++=ω () 或写为: a t a dt a d⨯+=ωδδ () 其中k dt da j dt da i dt da t a z y x++=δδ taδδ 称为在活动坐标系中的“相对导数”,相当于站在此活动坐标系中的观察者所看到的向量a 的变化率。
2.8机器人正运动学方程的D-H表示法在1955年,Denavit和Hartenberg在“ASME Journal of Applied Mechanics”发表了一篇论文,后来利用这篇论文来对机器人进行表示和建模,并导出了它们的运动方程,这已成为表示机器人和对机器人运动进行建模的标准方法,所以必须学习这部分内容。
Denavit-Hartenberg(D-H模型表示了对机器人连杆和关节进行建模的一种非常简单的方法,可用于任何机器人构型,而不管机器人的结构顺序和复杂程度如何。
它也可用于表示已经讨论过的在任何坐标中的变换,例如直角坐标、圆柱坐标、球坐标、欧拉角坐标及RPY坐标等。
另外,它也可以用于表示全旋转的链式机器人、SCARA机器人或任何可能的关节和连杆组合。
尽管采用前面的方法对机器人直接建模会更快、更直接,但D-H表示法有其附加的好处,使用它已经开发了许多技术,例如,雅克比矩阵的计算和力分析等。
假设机器人由一系列关节和连杆组成。
这些关节可能是滑动(线性)的或旋转(转动)的,它们可以按任意的顺序放置并处于任意的平面。
连杆也可以是任意的长度(包括零),它可能被弯曲或扭曲,也可能位于任意平面上。
所以任何一组关节和连杆都可以构成一个我们想要建模和表示的机器人。
为此,需要给每个关节指定一个参考坐标系,然后,确定从一个关节到下一个关节(一个坐标系到下一个坐标系)来进行变换的步骤。
如果将从基座到第一个关节,再从第一个关节到第二个关节直至到最后一个关节的所有变换结合起来,就得到了机器人的总变换矩阵。
在下一节,将根据D-H表示法确定一个一般步骤来为每个关节指定参考坐标系,然后确定如何实现任意两个相邻坐标系之间的变换,最后写出机器人的总变换矩阵。
图2.25 通用关节—连杆组合的D-H表示假设一个机器人由任意多的连杆和关节以任意形式构成。
图2.25表示了三个顺序的关节和两个连杆。
虽然这些关节和连杆并不一定与任何实际机器人的关节或连杆相似,但是他们非常常见,且能很容易地表示实际机器人的任何关节。
力学运动与运动学方程力学运动是物体在受到力作用下的运动,而运动学方程则是描述物体运动的方程。
通过对力学运动和运动学方程的研究和应用,我们可以深入了解物体的运动规律,并利用这些规律解决实际问题。
一、力学运动力学运动是研究物体受到力作用下的运动规律的学科。
在力学运动中,主要考虑物体的速度、加速度以及运动的轨迹等因素。
力学运动可以分为匀速直线运动、变速直线运动、曲线运动等不同类型。
1. 匀速直线运动在匀速直线运动中,物体的速度保持恒定,而加速度为零。
这意味着物体在单位时间内所经过的路程相等。
匀速直线运动的运动学方程为:\[v = v_0\]\[s = v_0t\]其中,\(v\)表示物体的末速度,\(v_0\)表示物体的初速度,\(s\)表示物体的位移,\(t\)表示经过的时间。
2. 变速直线运动在变速直线运动中,物体的速度随时间而变化,加速度不为零。
变速直线运动的运动学方程为:\[v = v_0 + at\]\[s = v_0t + \frac{1}{2}at^2\]其中,\(a\)表示物体的加速度。
3. 曲线运动曲线运动是指物体运动的轨迹为曲线的运动。
在曲线运动中,物体的速度和加速度都是矢量,需要考虑其方向。
曲线运动常涉及到极坐标、曲线的参数方程等数学工具来描述。
二、运动学方程的应用运动学方程不仅是研究物体运动的基础,也是解决实际问题的重要工具。
以下是运动学方程的一些应用。
1. 路程-时间图运动学方程中的位移-时间方程可以用于绘制物体的路程-时间图。
通过分析路程-时间图,我们可以得到物体的运动方式,例如匀速运动、加速运动或者减速运动。
2. 速度-时间图在运动学方程中,速度-时间方程可以用于绘制物体的速度-时间图。
通过分析速度-时间图,我们可以了解物体的速度变化规律,例如加速度大小、正负号等。
3. 解决实际问题通过运动学方程,我们可以解决一系列与物体运动相关的实际问题。
例如,我们可以通过已知的位移和时间求解物体的平均速度、通过已知的加速度和时间求解物体的位移,或者求解加速度的大小等。
习题5:某机器人采用平移关节和旋转关节构成,如图所示,其三个关节为平移关节,实现沿X、Y、Z轴的平移。
后3个关节为旋转关节分别绕J4、J5、J 6旋转,用与机器人末端姿态的调整。
一机器人在图中的姿态为初始状态,并将末端坐标系建立在机器人手抓中间。
试建立其连杆坐标系,推导正向运动学方程,并给出你想运动学的求解方法。
解:建立如图坐标系。
习题6:如图所示,一个移动机械手由移动机器人和机械手组成。
其中机械受为5个自由度串联关节机器人,5个关节皆为旋转关节。
移动机器人为差动驱动,移动机器人的坐标建立在两个驱动轮中间轴线的中点。
试建立该移动机械手的正向运动学方程。
解:由题,设所有连杆水平为初始状态。
建立坐标系:。
第三章 动量定理及其守恒定律习题解答3.5.1 质量为2kg 的质点的运动学方程为j t t i t r ˆ)133(ˆ)16(22+++-= (单位:米,秒), 求证质点受恒力而运动,并求力的方向大小。
解:∵j i dt r d a ˆ6ˆ12/22+==, j i a m F ˆ12ˆ24+==为一与时间无关的恒矢量,∴质点受恒力而运动。
F=(242+122)1/2=125N ,力与x 轴之间夹角为: '34265.0/︒===arctg F arctgFx yα3.5.2 质量为m 的质点在o-xy 平面内运动,质点的运动学方程为:j t b i t a r ˆsin ˆcos ωω+=,a,b,ω为正常数,证明作用于质点的合力总指向原点。
证明:∵r j t b i t a dtr d a2222)ˆsin ˆcos (/ωωωω-=+-==r m a m F2ω-==, ∴作用于质点的合力总指向原点。
3.5.3 在脱粒机中往往装有振动鱼鳞筛,一方面由筛孔漏出谷粒,一方面逐出秸杆,筛面微微倾斜,是为了从较低的一边将秸杆逐出,因角度很小,可近似看作水平,筛面与谷粒发生相对运动才可能将谷粒筛出,若谷粒与筛面静摩擦系数为0.4,问筛沿水平方向的加速度至少多大才能使谷物和筛面发生相对运动?解:以地为参考系,设谷物的质量为m ,所受到的最大静摩擦力为 mg f oμ=,谷物能获得的最大加速度为2/92.38.94.0/s m g m f a o =⨯===μ ∴筛面水平方向的加速度至少等于3.92米/秒2,才能使谷物与筛面发生相对运动。
3.5.3 题图 3.5.4题图3.5.4 桌面上叠放着两块木板,质量各为m 1 ,m 2,如图所示,m 2和桌面间的摩擦系数为μ2,m 1和m 2间的摩擦系数为μ1,问沿水平方向用多大的力才能把下面的木板抽出来。
解:以地为参考系,隔离m 1、m 2,其受力与运动情况如图所示,其中,N 1'=N 1,f 1'=f 1=μ1N 1,f 2=μ2N 2,选图示坐标系o-xy ,对m 1,m 2分别应用牛顿二定律,有 00212222211111111=--=--=-=g m N N a m N N F g m N a m N μμμ 解方程组,得()2221211211/m g m g m gm F a ga μμμμ---==要把木板从下面抽出来,必须满足12a a >,即 gm g m g m g m F 12221211μμμμ>---()()g m m F 2121++>∴μμ3.5.5 质量为m 2的斜面可在光滑的水平面上滑动,斜面倾角为α,质量为m 1的运动员与斜面之间亦无摩擦,求运动员相对于斜面的加速度及其对斜面的压力。
第三章牛顿运动定律·动量守恒定律习题解答3.5.1质量为2kg的质点的运动方程为r=(6t2-10)i+(3t2+3t+10)j(t为时间,单位为s;长度单位为m)求证质点受恒力而运动,并求力的大小方向.解:运动学方程为恒矢量。
3.5.2质量为m的质点在Oxy平面内运动,质点的运动方程为r=acoswt i+bsinwt ja,b,w为正常数,证明作用于质点的合力总指向原点.解:运动学方程则与方向相反指向原点。
3.5.3在脱粒机中往往装有振动鱼鳞筛,一方面由筛孔漏出谷粒,一方面逐出秸杆,筛面微微倾斜,是为了从较低的一边将知杆逐出,因角度很小,可近似看作水平,筛面与谷粒发生相对运动才可能将谷粒筛出,若谷粒与得到面静摩擦系数为0.4,问得到沿水平方向的加速度至少多大才能使谷粒和得到面发生相对运动.解:摩擦力满足μmg ≤ ma则 a 至少为μg=0.4*9.8m/s2才能使它们发生相对运动。
3.5.4桌面上叠反放着两块木版,质量各为m1,m2,如图所示m2和桌面的摩察系数为μ2,m1和m2间的静摩察系数为μ1.沿水平方向用多大的力才能把下面的木版抽出来.解:研究对象分别为<m1><m2>坐标系:o-xy受力分析:m1: m2: 列方程坐标分量式①②③④联立解得:只有a2x≥ a1x 时,才能抽出。
3.5.5质量为m2的斜面可在光滑水平面上运动,斜面倾角为a,质量为m1的小球与斜面之间亦无摩察,求小球相对于斜面的加速度及其对斜面的压力.解:研究对象分别为<m1><m2>坐标系:o-xy受力分析:m1:m2:列方程坐标分量式①②③④由相对运动:投影:解得:3.5.6在图示的装置中两物体的质量各为m1,m2.物体之间及物体与桌面的间摩察系数都为μ.求在力F的作用下两物体加速度及其绳内张力.不计滑轮和绳的质量及轴承摩察,绳不可伸长.解:研究对象分别为<m1><m2>坐标系:o-x受力分析: m1:m2:列方程坐标分量式①②③3.5.7在图示的装置中,物体A,B,C 的质量各为m1,m2,m3且两两不相等,若物体A,B 与桌面间的摩擦系数均为μ,求三个物体的加速度及绳内的张力,不计绳和油轮质量,不计轴承摩擦.绳不可伸长.解:研究对象分别为<m1><m2><m3> 坐标系:o-xy 受力分析:m1:m2:m3:列方程T1= T1′= T2 = T2′= T 坐标分量式①②③辅助方程:(绳子的总长度一定)3.5.8天平左端挂一定滑轮,一轻绳跨过滑轮,绳的两端分别系上质量为m1,m2的物体(m1≠m2).天平右端的托盘内放有砝码.问天平托盘和砝码共重若干诸能保持天平平衡?不计滑轮和绳的质量及轴承摩擦,绳不伸长.解:研究对象分别为<m1><m2>坐标系:o-xm1:受力分析:m2:列方程坐标分量式①②绳不伸长,解得:于是天平左端受力大小为 2T右端的砝码和托盘重为:3.5.9跳伞运动员初张伞时的速度为,阻力大小与速度平方成正比:,人伞总质量为m,求的函数(提示:积分时可利用式.)解:,积分时变为则则则3.5.10一巨石与斜面因地震而分裂,脱离斜面下滑至水平石面之速度为v0,求在水平面上巨石速度与时间的关系,摩擦系数为(注:不必求v 作为t的显函数).解:在水平面上,t=0,则3.5.11棒球质量为0.14kg,用棒击棒球的力随时间的变化如图所示,设棒被击前后速度增量大小为70m/s.求力的最大值,打击时,不计重力.解:0 - 0.05s内:F=20Fmaxt0.05-0.08s内:F=Fmax(8-100t)冲量:=0.025Fmax+0.015Fmax=0.04 Fmax动量的增量:∴Fmax=245N3.5.12沿铅直向上发射玩具火箭的推力随时间变化如图所示.火箭的质量为2kg,t=0时处于静止.求火箭发射后的最大速率和最大高度(注意,推力>重力时才起动).解:由动量守恒:F > mg 时才起动,,t = 4 s 时F = mg时间应从t > 4 s 开始。
正逆运动学方程一、正运动学方程正运动学方程是从关节空间到笛卡尔空间的映射,即通过机器人的关节角度来求解机器人末端执行器的位置和姿态。
对于一个n自由度的机器人,其正运动学方程可以表示为:x = f(q)其中,x表示机器人末端执行器的位置和姿态,q表示机器人的关节角度。
正运动学方程可以通过机器人的几何模型和关节变量求解得到,其中涉及到一系列的向量和矩阵运算。
具体地,正运动学方程可以由以下步骤得到:1. 根据机器人的连杆参数(如长度、夹角等)确定连杆变换矩阵;2. 将这些连杆变换矩阵按照关节顺序进行乘积,得到从机器人基座到末端执行器的总变换矩阵;3. 从总变换矩阵中提取位置和姿态信息,得到机器人末端执行器的位置和姿态;4. 将位置和姿态信息表示为坐标系中的坐标值。
二、逆运动学方程逆运动学方程是从笛卡尔空间到关节空间的映射,即通过已知的机器人末端执行器的位置和姿态来求解机器人的关节角度。
由于笛卡尔空间中的位置和姿态信息是冗余的,因此逆运动学方程往往是多解的。
对于一个n自由度的机器人,其逆运动学方程可以表示为:q = g(x)其中,q表示机器人的关节角度,x表示机器人末端执行器的位置和姿态。
逆运动学方程可以通过迭代优化、解析解法或试错法等方法求解。
具体地,逆运动学方程的求解可以分为以下步骤:1. 根据机器人末端执行器的位置和姿态信息,构建一个或多个约束方程;2. 解约束方程,得到关节角度的解;3. 根据不同的优化目标,选择最优的关节角度解;4. 将最优解映射回关节空间。
三、正逆运动学在机器人中的应用正逆运动学是机器人学中的基本概念,是实现机器人运动控制和路径规划的基础。
在机器人应用中,正逆运动学的具体作用如下:1. 运动控制:通过正运动学,机器人可以根据给定的关节角度计算出末端执行器的位置和姿态,从而实现精确的运动轨迹控制。
在实时控制系统中,正运动学方程用于计算末端执行器的期望位置和姿态,并通过反馈控制算法实现机器人的精确跟踪。