第三章 工业机器人运动学-2运动学方程
- 格式:ppt
- 大小:689.00 KB
- 文档页数:40


《工业机器人》课程教学大纲课程编号:0803701069课程名称:工业机器人英文名称:Industrial Robot课程类型:专业任选课总学时:24 讲课学时:20 实验学时:4学分:1.5适用对象:四年制机械设计制造及其自动化专业、四年制机械电子工程专业先修课程:高等数学、线性代数、工程制图、机械工程材料、理论力学、材料力学、机械原理、机械设计、电子技术、电工技术、机械制造基础、互换性与技术测量、液压与气压传动、机电传动控制、单片机原理及应用、自动控制原理等。
一、课程性质、目的和任务工业机器人课程是机械设计制造及其自动化专业各专业方向的一门主要专业技术课,是一门多学科的综合性技术,它涉及自动控制、计算机、传感器、人工智能、电子技术和机械工程等多学科的内容。
其目的是使学生了解工业机器人的基本结构,了解和掌握工业机器人的基本知识,使学生对机器人及其控制系统有一个完整的理解。
培养学生在机器人技术方面分析与解决问题的能力,培养学生在机器人技术方面具有一定的动手能力,为毕业后从事专业工作打下必要的机器人技术基础。
二、教学基本要求本课程以机器人为研究对象,以工业机器人为重点。
学完本课程应达到以下基本要求:1.了解机器人的由来与发展、组成与技术参数,掌握机器人分类与应用,对各类机器人有较系统地完整认识。
2.了解机器人运动学的基本概念,能进行简单机器人的位姿分析和运动分析。
3.了解机器人本体基本结构,包括机身及臂部结构、腕部及手部结构、传动及行走机构等。
4.了解机器人控制系统的构成、编程语言与编程特点。
三、教学内容及要求绪论0.1 概述0.1.1 机器人的由来与发展0.1.2 机器人的定义0.1.3 机器人技术的研究领域与学科范围0.2 机器人的分类0.2.1 按机器人的开发内容与应用分类0.2.2 按机器人的发展程度分类0.2.3 按机器人的性能指标分类0.2.4 按机器人的结构形式分类0.2.5 按坐标形式分类0.2.6 按控制方式分类0.2.7 按驱动方式分类0.2.8 按机器人工作时的机座可动性分类0.3 机器人的应用0.3.1 工业机器人的应用0.3.2 操纵型机器人的应用0.3.3 智能机器人的应用0.4 机器人的组成与技术参数0.4.1 机器人的基本组成0.4.2 机器人主要技术参数0.4.3 MOTOMAN UP6型通用工业机器人技术参数0.4.4 MOTOMAN EA1400型弧焊机器人技术参数第一章机器人运动学1.1 齐次坐标与动系位姿矩阵1.1.1 齐次坐标1.1.2 动系的位姿表示1.2 齐次变换1.2.1 旋转的齐次变换1.2.2 平移的齐次变换1.2.3 复合变换1.3 机器人的位姿分析1.3.1杆件坐标系的建立1.3.2 连杆坐标系间的变换矩阵1.4 机器人正向运动学1.4.1 斯坦福机器人运动方程1.4.2 PUMA-560机器人运动学方程1.5 机器人逆向运动学1.5.1 逆向运动学的解1.5.2 逆向运动学求解实例第三章机器人轨迹规划3.1 机器人轨迹规划概述3.1.1 机器人轨迹的概念3.1.2 轨迹规划的一般性问题3.1.3 轨迹的生成方式3.1.4 轨迹规划涉及的主要问题3.2 插补方式分类与轨迹控制3.2.1 插补方式分类3.2.2 机器人轨迹控制过程第四章机器人本体基本结构4.1 概述4.1.1 机器人本体的基本结构形式4.1.2 机器人本体材料的选择4.2 机身及臂部结构4.2.1 机器人机身结构基本形式和特点4.2.2 机器人臂部结构基本形式和特点4.2.3 机器人的平稳性和臂杆平衡方法4.3 腕部及手部结构4.3.1 机器人腕部结构基本形式和特点4.3.2 机器人手部结构基本形式和特点4.4 传动及行走机构4.4.1 机器人传动机构结构基本形式和特点4.4.2 机器人行走机构结构基本形式和特点第五章机器人控制系统5.1 机器人传感器5.2 驱动与运动控制系统5.3 控制理论与算法第六章机器人编程语言与离线编程四、实践环节课内实验工业机器人实验安排在课程内,开设3个实验:1.焊接机器人自动跟踪系统认知实验2学时2.MOTOMAN机器人焊枪动作与编程实验2学时五、课外习题及课程讨论为达到本课程的教学基本要求,课外习题不应少于8题。
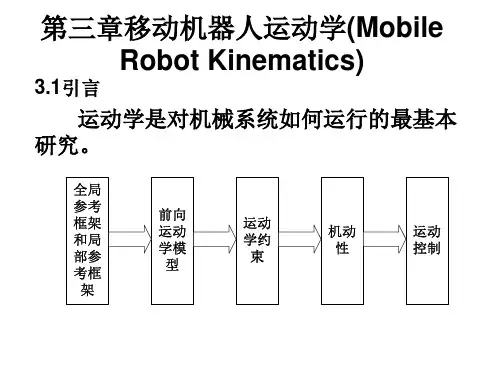
第3章工业机器人运动学和动力学机器人操作臂可看成一个开式运动链,它是由一系列连杆通过转动或移动关节串联而成。
开链的一端固定在基座上,另一端是自由的,安装着工具,用以操作物体,完成各种作业。
关节由驱动器驱动,关节的相对运动导致连杆的运动,使手爪到达所需的位姿。
在轨迹规划时,最感兴趣的是末端执行器相对于固定参考系的空间描述。
为了研究机器人各连杆之间的位移关系,可在每个连杆上固接一个坐标系,然后描述这些坐标系之间的关系。
Denavit和Hartenberg提出一种通用方法,用一个4*4的齐次变换矩阵描述相邻两连杆的空间关系,从而推导出“手爪坐标系”相对于“参考系”的等价齐次变换矩阵,建立出操作臂的运动方程。
称之为D-H矩阵法。
3.1 工业机器人的运动学教学时数:4学时教学目标:理解工业机器人的位姿描述和齐次变换;掌握齐次坐标和齐次变换矩阵的运算;理解连杆参数、连杆变换和运动学方程的求解;教学重点:掌握齐次变换及运动学方程的求解教学难点:齐次变换及运算教学方法:讲授教学步骤:齐次变换有较直观的几何意义,而且可描述各杆件之间的关系,所以常用于解决运动学问题。
已知关节运动学参数,求出末端执行器运动学参数是工业机器人正向运动学问题的求解;反之,是工业机器人逆向运动学问题的求解。
3.1.1 工业机器人位姿描述1.点的位置描述在选定的指教坐标系{A}中,空间任一点P的位置可用3*1的位置矢量表示,其左上标代表选定的参考坐标系。
2.点的齐次坐标如果用四个数组成4*1列阵表示三维空间直角坐标系{A}中点P,则该列阵称为三维空间点P的齐次坐标,如下:必须注意,齐次坐标的表示不是惟一的。
我们将其各元素同乘一个非零因子后,仍然代表同一点P,即其中:,,。
该列阵也表示P点,齐次坐标的表示不是惟一的。
3.坐标轴方向的描述用i、j、k分别表示直角坐标系中X、Y、Z坐标轴的单位向量,用齐次坐标来描述X、Y、Z轴的方向,则有,,从上可知,我们规定:4*1列阵中第四个元素为零,且,则表示某轴(某矢量)的方向。
教案首页课程名称农业机器人任课教师李玉柱第3章机器人运动学和动力学计划学时 3教学目的和要求:1.概述,齐次坐标与动系位姿矩阵,了解平移和旋转的齐次变换;2.机器人的运动学方程的建立与求解*;3.机器人的动力学*重点:1.机器人操作机运动学方程的建立及求解;2.工业机器人运动学方程3.机器人动力学难点:1. 机器人动力学方程及雅可比矩阵基本原理思考题:1.简述齐次坐标与动系位姿矩阵基本原理。
2.连杆参数及连杆坐标系如何建立?3.机器人动力学方程及雅可比矩阵基本原理是什么?第3章机器人运动学和动力学教学主要内容:3.2 齐次坐标与动系位姿矩阵3.3 齐次变换3.4 机器操作机运动学方程的建立与求解3.5 机器人运动学方程3.6 机器人动力学本章将主要讨论机器人运动学和动力学基本问题。
先后引入了齐次坐标与动系位姿矩阵、齐次变换,通过对机器人的位姿分析,介绍了机器人运动学方程;在此基础上有对机器人运动学方程进行了较为深入的探讨。
3.1 概述机器人,尤其是关节型机器人最有代表性。
关节型机器人实质上是由一系列关节连接而成的空间连杆开式链机构,要研究关节型机器人,必须对运动学和动力学知识有一个基本的了解。
分析机器人连杆的位置和姿态与关节角之间的关系,理论称为运动学,而研究机器人运动和受力之间的关系的理论则是动力学。
3.2 齐次坐标与动系位姿矩阵3.2.1 点的位置描述在关节型机器人的位姿控制中,首先要精确描述各连杆的位置。
为此,先定义一个固定的坐标系,其原点为机器人处于初始状态的正下方地面上的那个点,如图3-1(a)所示。
记该坐标系为世界坐标系。
在选定的直角坐标系{A}中,空间任一点P的位置可以用3×1的位置向量A P表示,其左上标表示选定的坐标系{A},此时有A P=XYZ P P P ⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦式中:P X、P Y、P Z—点P在坐标系{A}中的三个位置坐标分量,如图3-1(b)。
3.2.2 齐次坐标将一个n维空间的点用n+1维坐标表示,则该n+1维坐标即为n维坐标的齐次坐标....。