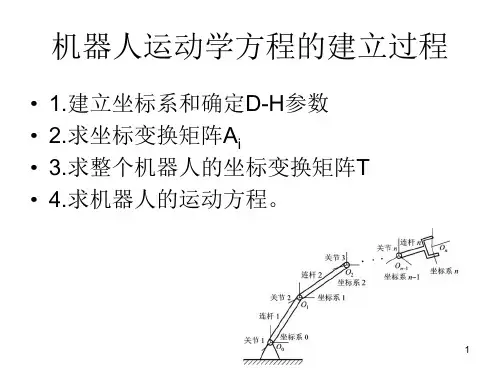
运动学方程的建立
- 格式:ppt
- 大小:1.15 MB
- 文档页数:17
轨迹方程和运动学方程一、引言在物理学中,轨迹方程和运动学方程是描述物体运动的重要工具。
轨迹方程用于描述物体在空间中的运动轨迹,而运动学方程则用于描述物体在时间上的变化规律。
本文将分别介绍轨迹方程和运动学方程的概念、应用以及相关原理。
二、轨迹方程轨迹方程是描述物体在空间中运动轨迹的数学表达式。
对于一个质点在二维平面上的运动,其轨迹可以用参数方程表示。
常见的参数方程包括直角坐标系下的x=f(t)和y=g(t),极坐标系下的r=f(θ)。
例如,一个物体在水平方向以匀速v0运动,竖直方向受重力加速度g的影响,则其轨迹方程可以表示为x=v0t,y=1/2gt^2。
对于三维空间中的运动,常用的轨迹方程是参数方程。
例如,一个物体在水平方向以速度v0运动,竖直方向受重力加速度g的影响,则其轨迹方程可以表示为x=v0t,y=0,z=1/2gt^2。
轨迹方程的应用非常广泛。
例如,在天文学中,轨迹方程可以用于描述行星、卫星等天体的运动轨迹;在工程学中,轨迹方程可以用于描述机器人、无人机等设备的运动轨迹。
三、运动学方程运动学方程是描述物体在时间上变化规律的数学表达式。
在经典力学中,常用的运动学方程包括位移-时间关系、速度-时间关系和加速度-时间关系。
位移-时间关系是描述物体位移随时间变化的规律。
对于匀速运动,位移-时间关系可以表示为s=v0t,其中s为位移,v0为速度,t为时间。
对于匀加速运动,位移-时间关系可以表示为s=v0t+1/2at^2,其中a为加速度。
速度-时间关系是描述物体速度随时间变化的规律。
对于匀速运动,速度-时间关系可以表示为v=v0,其中v为速度,v0为初速度。
对于匀加速运动,速度-时间关系可以表示为v=v0+at,其中a为加速度。
加速度-时间关系是描述物体加速度随时间变化的规律。
对于匀加速运动,加速度-时间关系可以表示为a=a0,其中a为加速度,a0为常数。
运动学方程的应用也非常广泛。
例如,在机械工程中,运动学方程可以用于分析机械臂、滑动轨道等设备的运动规律;在交通工程中,运动学方程可以用于研究车辆的行驶速度和加速度。
六自由度机器人逆向运动学解题过程
六自由度机器人逆向运动学主要是通过求解机器人末端执行器的位姿,从而得到关节的角度。
逆向运动学求解的过程如下:
1. 了解机器人运动学模型:首先需要了解六自由度机器人的运动学模型,包括机器人臂部的结构、关节类型和运动学参数。
常见的运动学模型有DH(Denavit-Hartenberg)模型和旋量法。
2. 建立运动学方程:根据机器人臂部的结构,建立运动学方程。
对于DH模型,运动学方程为:
θ1 * A1 + θ2 * A2 + θ3 * A3 + θ4 * A4 + θ5 * A5 + θ6 * A6 = T
其中,θ1-θ6为六个关节的角度,A1-A6为相邻两个关节之间的变换矩阵。
3. 初始化关节角度:给定一个初始的关节角度序列,作为求解逆向运动学的输入。
4. 求解位姿:利用运动学方程,将关节角度序列代入,计算出末端
执行器的位姿。
5. 评价求解结果:根据实际应用需求,评价求解结果的精度和实用性。
如果结果不满足要求,可以调整初始关节角度序列,重复步骤2-4,直至得到满意的解。
6. 应用:将求解得到的关节角度序列应用于机器人控制系统,实现机器人的运动。
在求解过程中,可以使用一些优化算法,如牛顿法、梯度下降法等,以提高求解速度和精度。
同时,为了减少计算复杂度,可以采用一些技巧,如LU分解、QR分解等。
需要注意的是,六自由度机器人逆向运动学求解过程依赖于机器人运动学模型的精确性、运动学方程的稳定性和求解算法的性能。
在实际应用中,可能需要根据具体情况调整模型和算法,以获得更优的求解结果。
两轮车运动学模型建立
两轮车的运动学模型可以分为纵向运动和横向运动两个方面。
1. 纵向运动:
- 纵向速度:根据牛顿第二定律,可以得到纵向速度的动力学方程:$F_f - F_r = m \cdot a$,其中 $F_f$ 是前轮的纵向力,$F_r$ 是后轮的纵向力,$m$ 是车辆质量,$a$ 是车辆的纵向加速度。
- 纵向位移:根据运动学关系,可以得到纵向位移的方程:$s = s_0 + v_0 \cdot t + \frac{1}{2} \cdot a \cdot t^2$,其中 $s$ 是纵向位移,$s_0$ 是初始位移,$v_0$ 是初始速度,$t$ 是时间。
2. 横向运动:
- 横向速度:可以根据车辆的转弯半径$R$ 和车辆的纵向速度$v$,计算车辆的横向速度 $v_y$:$v_y = \frac{v^2}{R}$。
- 横向位移:可以根据车辆的横向速度$v_y$ 和时间$t$ 计算车辆的横向位移 $y$:$y = v_y \cdot t$。
需要注意的是,以上模型是理想化的模型,没有考虑到车辆的滑移、转向角度等实际因素。
在实际应用中,还需要考虑到轮胎的摩擦力、车辆的悬挂系统等因素,以得到更准确的运动学模型。
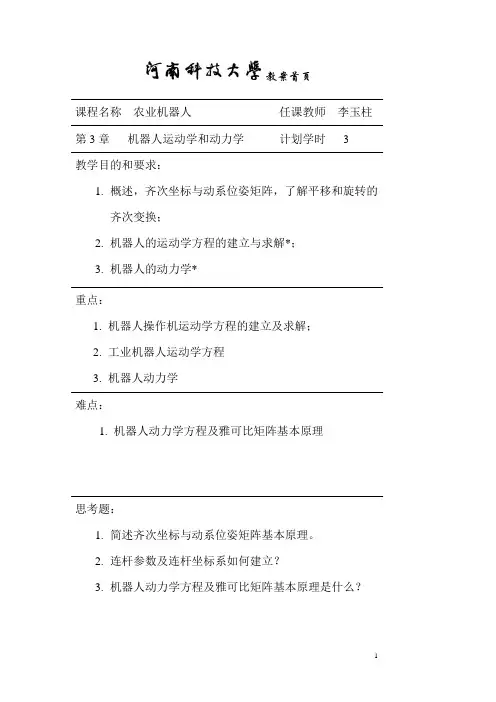
教案首页课程名称农业机器人任课教师李玉柱第3章机器人运动学和动力学计划学时 3教学目的和要求:1.概述,齐次坐标与动系位姿矩阵,了解平移和旋转的齐次变换;2.机器人的运动学方程的建立与求解*;3.机器人的动力学*重点:1.机器人操作机运动学方程的建立及求解;2.工业机器人运动学方程3.机器人动力学难点:1. 机器人动力学方程及雅可比矩阵基本原理思考题:1.简述齐次坐标与动系位姿矩阵基本原理。
2.连杆参数及连杆坐标系如何建立?3.机器人动力学方程及雅可比矩阵基本原理是什么?第3章机器人运动学和动力学教学主要内容:3.2 齐次坐标与动系位姿矩阵3.3 齐次变换3.4 机器操作机运动学方程的建立与求解3.5 机器人运动学方程3.6 机器人动力学本章将主要讨论机器人运动学和动力学基本问题。
先后引入了齐次坐标与动系位姿矩阵、齐次变换,通过对机器人的位姿分析,介绍了机器人运动学方程;在此基础上有对机器人运动学方程进行了较为深入的探讨。
3.1 概述机器人,尤其是关节型机器人最有代表性。
关节型机器人实质上是由一系列关节连接而成的空间连杆开式链机构,要研究关节型机器人,必须对运动学和动力学知识有一个基本的了解。
分析机器人连杆的位置和姿态与关节角之间的关系,理论称为运动学,而研究机器人运动和受力之间的关系的理论则是动力学。
3.2 齐次坐标与动系位姿矩阵3.2.1 点的位置描述在关节型机器人的位姿控制中,首先要精确描述各连杆的位置。
为此,先定义一个固定的坐标系,其原点为机器人处于初始状态的正下方地面上的那个点,如图3-1(a)所示。
记该坐标系为世界坐标系。
在选定的直角坐标系{A}中,空间任一点P的位置可以用3×1的位置向量A P表示,其左上标表示选定的坐标系{A},此时有A P=XYZ P P P ⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦式中:P X、P Y、P Z—点P在坐标系{A}中的三个位置坐标分量,如图3-1(b)。
3.2.2 齐次坐标将一个n维空间的点用n+1维坐标表示,则该n+1维坐标即为n维坐标的齐次坐标....。
力学运动与运动学方程力学运动是物体在受到力作用下的运动,而运动学方程则是描述物体运动的方程。
通过对力学运动和运动学方程的研究和应用,我们可以深入了解物体的运动规律,并利用这些规律解决实际问题。
一、力学运动力学运动是研究物体受到力作用下的运动规律的学科。
在力学运动中,主要考虑物体的速度、加速度以及运动的轨迹等因素。
力学运动可以分为匀速直线运动、变速直线运动、曲线运动等不同类型。
1. 匀速直线运动在匀速直线运动中,物体的速度保持恒定,而加速度为零。
这意味着物体在单位时间内所经过的路程相等。
匀速直线运动的运动学方程为:\[v = v_0\]\[s = v_0t\]其中,\(v\)表示物体的末速度,\(v_0\)表示物体的初速度,\(s\)表示物体的位移,\(t\)表示经过的时间。
2. 变速直线运动在变速直线运动中,物体的速度随时间而变化,加速度不为零。
变速直线运动的运动学方程为:\[v = v_0 + at\]\[s = v_0t + \frac{1}{2}at^2\]其中,\(a\)表示物体的加速度。
3. 曲线运动曲线运动是指物体运动的轨迹为曲线的运动。
在曲线运动中,物体的速度和加速度都是矢量,需要考虑其方向。
曲线运动常涉及到极坐标、曲线的参数方程等数学工具来描述。
二、运动学方程的应用运动学方程不仅是研究物体运动的基础,也是解决实际问题的重要工具。
以下是运动学方程的一些应用。
1. 路程-时间图运动学方程中的位移-时间方程可以用于绘制物体的路程-时间图。
通过分析路程-时间图,我们可以得到物体的运动方式,例如匀速运动、加速运动或者减速运动。
2. 速度-时间图在运动学方程中,速度-时间方程可以用于绘制物体的速度-时间图。
通过分析速度-时间图,我们可以了解物体的速度变化规律,例如加速度大小、正负号等。
3. 解决实际问题通过运动学方程,我们可以解决一系列与物体运动相关的实际问题。
例如,我们可以通过已知的位移和时间求解物体的平均速度、通过已知的加速度和时间求解物体的位移,或者求解加速度的大小等。
拉格朗日法是分析力学中的一种方法,用于描述多体系统的运动。
这种方法基于拉格朗日函数L,它由系统的动能T和势能V组成。
假设我们有一个n自由度的多体系统,其动能和势能分别为:T = 1/2 ∑ mi × vi^2
V = V(q1, q2, ..., qn)
其中,m是质量,v是速度,q是位置。
那么拉格朗日函数L可以定义为:
L = T - V
根据拉格朗日函数,我们可以得到系统的运动方程,也称为拉格朗日方程:
dL/dq = dT/dq - dV/dq
其中,dq表示对q的偏导数。
这个方程描述了系统在给定力的作用下如何运动。
在给定初始条件的情况下,我们可以通过解这个方程来找到系统的运动轨迹。
需要注意的是,拉格朗日方程是一种描述系统动力学的方程,它并不直接给出系统的运动轨迹。
要找到具体的运动轨迹,通常需要求解这个方程。
这可能涉及到数值方法,例如欧拉法、龙格-库塔法等。
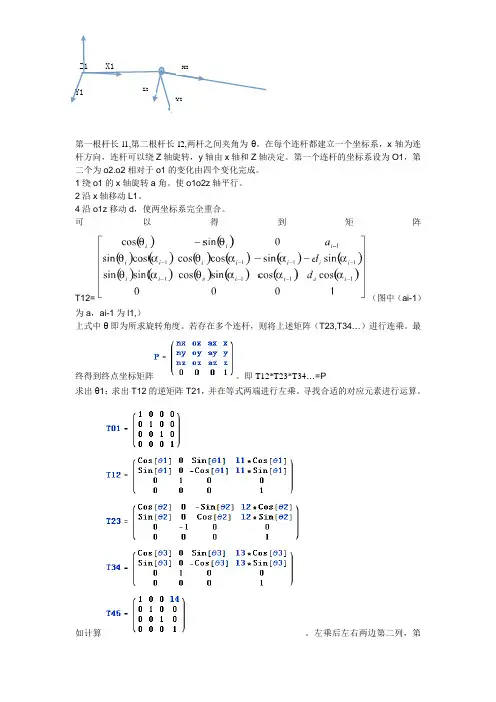
Z1 X1
Y1
第一根杆长l1,第二根杆长l2,两杆之间夹角为θ。
在每个连杆都建立一个坐标系,x 轴为连杆方向,连杆可以绕Z 轴旋转,y 轴由x 轴和Z 轴决定。
第一个连杆的坐标系设为O1,第二个为o2.o2相对于o1的变化由四个变化完成。
1绕o1的x 轴旋转a 角。
使o1o2z 轴平行。
2沿x 轴移动L1。
4沿o1z 移动d ,使两坐标系完全重合。
可以得到矩阵T12=(图中(ai-1)为a ,ai-1为l1,)
上式中θ即为所求旋转角度。
若存在多个连杆,则将上述矩阵(T23,T34…)进行连乘。
最终得到终点坐标矩阵。
即T12*T23*T34…=P
求出θ1:求出T12的逆矩阵T21,并在等式两端进行左乘。
寻找合适的对应元素进行运算。
如计算。
左乘后左右两边第二列,第X2 Z2 Y2
三行相等。
可求出θ1=ARCtan(ox/oy)。
同理可求出θ2,θ3。

动力学的基本原理与运动方程推导动力学是物理学中研究物体运动的学科,它的基本原理和运动方程推导是了解和掌握动力学的关键。
本文将介绍动力学的基本原理,并推导出运动方程,以帮助读者更好地理解这一领域的知识。
一、动力学的基本原理动力学的基本原理包括牛顿三定律和能量守恒定律。
1. 牛顿第一定律:物体在没有外力作用下,将保持静止或匀速直线运动。
这意味着物体的速度只有在受到外力作用时才会改变。
2. 牛顿第二定律:物体的加速度与作用在其上的力成正比,与物体的质量成反比。
数学表达式为F=ma,其中F是物体所受的力,m是物体的质量,a是物体的加速度。
3. 牛顿第三定律:任何两个物体之间的相互作用力大小相等、方向相反。
这意味着物体之间的相互作用力总是成对出现的。
4. 能量守恒定律:在一个封闭系统中,能量的总量保持不变。
能量可以在不同形式之间相互转化,但总能量保持恒定。
二、运动方程的推导在了解了动力学的基本原理之后,我们可以推导出物体的运动方程。
假设一个物体在一维空间中运动,且只受到一个力的作用。
根据牛顿第二定律,我们知道物体的加速度与作用在其上的力成正比,与物体的质量成反比。
可以将牛顿第二定律表示为:F = ma其中,F是物体所受的力,m是物体的质量,a是物体的加速度。
根据运动学的定义,加速度可以表示为速度的变化率。
假设物体的初始速度为v0,加速度为a,时间为t,物体的速度可以表示为:v = v0 + at同样地,速度的变化率就是位移的变化率。
假设物体的初始位移为x0,位移为x,时间为t,物体的位移可以表示为:x = x0 + v0t + 1/2at^2这就是物体的运动方程,它描述了物体在给定时间内的位移。
通过上述推导,我们可以看到物体的运动方程与物体的质量、加速度、速度和位移之间的关系。
在实际应用中,我们可以通过测量物体的运动参数,来计算物体的质量或者力的大小。
三、动力学的应用动力学的原理和运动方程在很多领域都有广泛的应用。
习题5:某机器人采用平移关节和旋转关节构成,如图所示,其三个关节为平移关节,实现沿X、Y、Z轴的平移。
后3个关节为旋转关节分别绕J4、J5、J 6旋转,用与机器人末端姿态的调整。
一机器人在图中的姿态为初始状态,并将末端坐标系建立在机器人手抓中间。
试建立其连杆坐标系,推导正向运动学方程,并给出你想运动学的求解方法。
解:建立如图坐标系。
习题6:如图所示,一个移动机械手由移动机器人和机械手组成。
其中机械受为5个自由度串联关节机器人,5个关节皆为旋转关节。
移动机器人为差动驱动,移动机器人的坐标建立在两个驱动轮中间轴线的中点。
试建立该移动机械手的正向运动学方程。
解:由题,设所有连杆水平为初始状态。
建立坐标系:。
运动学方程的建立与求解英文回答:The equations of motion are a set of equations that describe the motion of an object under the influence of external forces. These equations can be used to predict the object's position, velocity, and acceleration at any given time.The most basic equations of motion are the following:v = u + at.s = ut + 1/2 at^2。
v^2 = u^2 + 2as.where:v is the final velocity of the object.u is the initial velocity of the object.a is the acceleration of the object.t is the time elapsed.s is the distance traveled.These equations can be derived from the definition of acceleration:a = dv/dt.where:a is the acceleration of the object.v is the velocity of the object.t is the time elapsed.By integrating this equation, we can obtain the following equations of motion:v = u + at.s = ut + 1/2 at^2。
v^2 = u^2 + 2as.These equations can be used to solve a wide variety of problems involving the motion of objects. For example, they can be used to:Determine the velocity of an object at a given time.Determine the distance traveled by an object in a given time.Determine the acceleration of an object.The equations of motion are a powerful tool for understanding the motion of objects. They can be used tosolve a wide variety of problems, and they can also be used to develop more complex models of motion.中文回答:运动学方程是一组方程,描述了物体在外部力作用下的运动。
dh法建立机器人运动学方程
DH法(Denavit-Hartenberg法)是一种用于建立机器人运动学方程的方法。
它是由Jacques Denavit和Richard Hartenberg在1955年提出的,用于描述机器人的运动学关系。
DH法将机器人的每个关节作为旋转或平移运动来描述,然后使用一个坐标系来描述每个关节之间的相对位置和方向。
这些坐标系被称为DH 坐标系,它们是固定在机器人上的。
DH法建立机器人运动学方程的步骤如下:
1. 定义坐标系
首先,需要定义一个基准坐标系(通常是世界坐标系),然后为每个关节定义一个本地坐标系。
这些本地坐标系与基准坐标系有一定的相对位置和方向。
2. 建立DH参数表
然后,需要建立一个DH参数表,其中包含每个关节之间的距离、角度和长度等参数。
这些参数将用于计算机器人的运动学方程。
3. 计算转换矩阵
接下来,需要计算从一个本地坐标系到另一个本地坐标系的转换矩阵。
这个转换矩阵可以通过使用DH参数表中定义的参数来计算得出。
4. 建立变换矩阵
然后,需要将每个关节之间的转换矩阵相乘,以建立一个总的变换矩阵。
这个变换矩阵描述了机器人末端执行器相对于基准坐标系的位置
和方向。
5. 建立运动学方程
最后,使用总的变换矩阵来建立机器人的运动学方程。
这个方程可以
用来计算机器人末端执行器在三维空间中的位置和方向。
总之,DH法是一种非常有用的方法,可以用于建立机器人的运动学方程。
它提供了一种简单而有效的方式来描述机器人关节之间的相对位
置和方向,并计算出机器人末端执行器在三维空间中的位置和方向。