维纳滤波器和卡尔曼滤波器
- 格式:pptx
- 大小:1.33 MB
- 文档页数:107

讲维纳和卡尔曼滤波 kay的统计信号处理基础维纳和卡尔曼滤波是两种常用的统计信号处理方法。
维纳滤波是一种线性滤波方法,用于信号的恢复和优化,而卡尔曼滤波则是一种递推滤波方法,用于动态系统状态估计和预测。
它们在信号处理、控制系统、雷达等多个领域都有广泛的应用。
维纳滤波(Wiener Filter)是由美国工程师诺尔伯特·维纳在上世纪四十年代提出的。
它的基本思想是通过最小化估计值与实际值之间的平方误差,来优化信号的恢复。
维纳滤波器是一个线性时不变系统,通过对输入信号进行加权平均来恢复原始信号。
维纳滤波器的权重函数是通过信号的功率谱密度和叠加信号的互功率谱密度来计算的。
当信号和噪声的功率谱密度已知时,维纳滤波器可以恢复出信号的最佳估计。
维纳滤波的数学模型可以表示为:\[ Y(k) = \sum_{n=0}^{N-1}h(n)X(k-n) + V(k) \]其中,Y(k)是输出信号,X(k)是输入信号,h(n)是维纳滤波器的冲激响应,V(k)是噪声。
维纳滤波器的关键是计算出冲激响应h(n),一般通过信号和噪声的功率谱密度来求解。
维纳滤波器的优点是简单易实现,计算量小,且可以通过对输入信号进行适当的加权平均来降低噪声。
但是,维纳滤波器对噪声和信号的功率谱密度的估计要求较高,对于非线性系统和非高斯噪声的处理效果较差。
相对于维纳滤波器,卡尔曼滤波(Kalman Filter)是一种更为复杂和高级的滤波方法,它由美国数学家鲁道夫·卡尔曼在上世纪五十年代提出,并在航天和导航领域得到了广泛应用。
卡尔曼滤波器是一种递推滤波方法,适用于状态变量随时间演化的动态系统。
卡尔曼滤波的基本思想是通过对系统状态进行递推估计,同时考虑系统的测量值和预测值,并根据它们的权重对估计值进行修正。
卡尔曼滤波器使用线性动力学模型来描述系统的状态变化,并基于高斯分布的统计特性来推导出滤波器的数学公式。
卡尔曼滤波器的数学模型可以表示为:\[ X_{k+1} = AX_k +Bu_k + w_k \]和\[ Z_k = HX_k + v_k \]其中,X_k是系统的状态向量,A是状态转移矩阵,B是输入控制向量,u_k是输入信号,w_k是过程噪声,Z_k是系统的观测向量,H是观测转移矩阵,v_k是观测噪声。
维纳滤波和卡尔曼滤波
哇塞!同学们,你们听说过维纳滤波和卡尔曼滤波吗?反正一开始我是完全不知道这俩是啥玩意儿。
就好像在一个神秘的科学王国里,突然冒出来两个奇怪的名字。
维纳滤波,这名字听起来是不是有点像某个超级英雄的技能?可它不是用来拯救世界的,而是在信号处理的世界里大展身手呢!
有一次上科学课,老师讲起维纳滤波,我那叫一个懵啊!老师说它就像是一个超级聪明的小助手,能把那些乱糟糟的信号变得整整齐齐。
我就想,这难道是有魔法吗?比如说,我们听到的广播里有时候会有沙沙的杂音,维纳滤波就能把这些杂音去掉,让声音变得清晰又好听。
这难道不神奇吗?
再说卡尔曼滤波,它就像是一个预测大师。
比如说,我们预测明天会不会下雨,可能不太准。
但卡尔曼滤波就能根据一堆的数据和信息,更准确地预测出一些变化。
我问同桌:“你能明白这俩滤波是咋回事不?”同桌摇摇头说:“我也迷糊着呢!”
后来老师又举了个例子,说维纳滤波好比是个精心整理房间的小管家,把房间里乱七八糟的东西归置得井井有条;卡尔曼滤波呢,就像是个能提前知道你需要什么东西的小精灵,早早地就给你准备好。
哎呀,虽然听了老师这么多例子,我还是觉得这俩滤波有点难理解。
不过我想,只要我努力学习,总有一天能搞清楚它们的!
同学们,你们是不是也和我一样,对维纳滤波和卡尔曼滤波充满了好奇和探索的欲望呢?反正我是下定决心要把它们弄明白啦!。


实验五不同滤波器的比较比较维纳滤波器、卡尔曼滤波器、匹配滤波器、自适应滤波器的异同一、维纳滤波器维纳滤波器是由数学家维纳提出的一种以最小平方为最优准则的线性滤波器。
在一定的约束条件下,其输出与一给定函数(通常称为期望输出)的差的平方达到最小,通过数学运算最终可变为一个托布利兹方程的求解问题。
维纳滤波是利用平稳随机过程的相关特性和频谱特性对混有噪声的信号进行滤波的方法。
设维纳滤波器的输入为含噪声的随机信号。
期望输出与实际输出之间的差值为误差,对该误差求均方,即为均方误差。
因此均方误差越小,噪声滤除效果就越好。
为使均方误差最小,关键在于求冲激响应。
如果能够满足维纳-霍夫方程,就可使维纳滤波器达到最佳。
根据维纳-霍夫方程,最佳维纳滤波器的冲激响应,完全由输入自相关函数以及输入与期望输出的互相关函数所决定。
维纳滤波器的优点是适应面较广,无论平稳随机过程是连续的还是离散的,是标量的还是向量的,都可应用。
对某些问题,还可求出滤波器传递函数的显式解,并进而采用由简单的物理元件组成的网络构成维纳滤波器。
维纳滤波器的缺点是,要求得到半无限时间区间内的全部观察数据的条件很难满足,同时它也不能用于噪声为非平稳的随机过程的情况,对于向量情况应用也不方便。
因此,维纳滤波在实际问题中应用不多。
实现维纳滤波的要求是:①输入过程是广义平稳的;②输入过程的统计特性是已知的。
根据其他最佳准则的滤波器亦有同样要求。
二、卡尔曼滤波器卡尔曼滤波是一种高效率的递归滤波器(自回归滤波器), 它能够从一系列的不完全及包含噪声的测量中,估计动态系统的状态。
状态估计是卡尔曼滤波的重要组成部分。
一般来说,根据观测数据对随机量进行定量推断就是估计问题,特别是对动态行为的状态估计,它能实现实时运行状态的估计和预测功能。
最常用的是最小二乘估计,线性最小方差估计、最小方差估计、递推最小二乘估计等。
卡尔曼提出的递推最优估计理论,采用状态空间描述法,在算法采用递推形式,卡尔曼滤波能处理多维和非平稳的随机过程。
卡尔曼滤波与维纳滤波在信号处理中的应用研究
卡尔曼滤波是一种线性的、递归的滤波算法,它能够对信号的状态进行估计和预测。
卡尔曼滤波是基于贝叶斯估计理论的一种优化方法,它不仅可以有效地消除噪声和偏差,还可以根据已有的历史数据对信号进行预测。
卡尔曼滤波广泛应用于航空航天、控制理论、信号处理等领域,是一种非常有效的信号处理算法。
维纳滤波是一种信号处理中最常用的滤波算法之一,它能够根据现有数据对信号进行优化处理,消除噪声和干扰,实现信号的恢复和重建。
维纳滤波利用了信号和噪声的统计特性,根据信号的功率谱和噪声的功率谱来进行滤波处理。
维纳滤波不仅可以用于图像处理、语音处理等多种信号处理领域,还可以应用于雷达信号处理、无线通信等工程实践中。
在实际应用中,卡尔曼滤波和维纳滤波通常结合使用,以获得更为准确和可靠的信号处理效果。
如在雷达信号处理中,利用卡尔曼滤波进行预测和估计,再经过维纳滤波进行优化处理,可以有效地消除噪声和干扰,获得高质量的信号信息。
在图像处理中,卡尔曼滤波和维纳滤波也可以结合使用,以实现图像的优化重建和增强。
总的来说,卡尔曼滤波和维纳滤波在信号处理中的应用非常广泛,可以有效地消除噪声和干扰,提高信号和数据的质量和可靠性,对于工程实践和科学研究都具有重要意义。
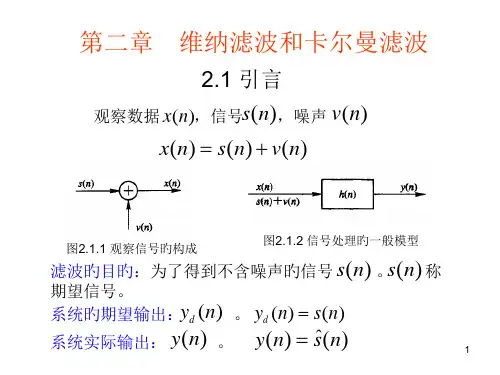
随机信号或随机过程(random process)是普遍存在的。
一方面,任何确定性信号经过测量后往往就会引入随机性误差而使该信号随机化;另一方面,任何信号本身都存在随机干扰,通常把对信号或系统功能起干扰作用的随机信号称之为噪声。
噪声按功率谱密度划分可以分为白噪声(white noise )和色噪声(color noise ),我们把均值为0的白噪声叫纯随机信号(pure random signal )。
因此,任何其它随机信号都可看成是纯随机信号与确定性信号并存的混合随机信号或简称为随机信号。
要区别干扰(interference )和噪声( noise)两种事实和两个概念。
非目标信号(nonobjective signal )都可叫干扰。
干扰可以是确定信号,如国内的50Hz 工频干扰。
干扰也可以是噪声,纯随机信号(白噪声)加上一个直流成分(确定性信号),就成了最简单的混合随机信号。
医学数字信号处理的目的是要提取包含在随机信号中的确定成分,并探求它与生理、病理过程的关系,为医学决策提供一定的依据。
例如从自发脑电中提取诱发脑电信号,就是把自发脑电看成是干扰信号,从中提取出需要的信息成分。
因此我们需要寻找一种最佳线性滤波器,当信号和干扰以及随机噪声同时输入该滤波器时,在输出端能将信号尽可能精确地表现出来。
维纳滤波和卡尔曼滤波就是用来解决这样一类问题的方法:从噪声中提取出有用的信号。
实际上,这种线性滤波方法也被看成是一种估计问题或者线性预测问题。
由当前时刻的观测值和过去时刻的观测值、、…的估计值。
用当前的和过去的观测值来估计当前的信号称为滤波;用过去的观测值来估计当前的或将来的信号,N ,称为预测;用过去的观测值来估计过去的信号,N ,称为平滑或者内插。
本章将讨论滤波和预测问题。
维纳滤波和卡尔曼滤波都是解决线性滤波和预测问题的方法,并且都是以均方误差最小为准则的,在平稳条件下两者的稳态结果是一致的。
但是它们解决问题的方法有很大区别。