第三章 维纳滤波和卡尔曼滤波
- 格式:pptx
- 大小:2.72 MB
- 文档页数:156
频域复原算法
频域复原算法是一种用于信号处理和图像处理的技术,它通过对信号或图像进行频域分析和处理,以恢复原始信号或图像。
常见的频域复原算法包括:
- 维纳滤波:维纳滤波是一种经典的频域复原算法,它通过在频域中估计信号的功率谱密度,并根据估计值对信号进行滤波,以恢复原始信号。
维纳滤波在图像处理中常用于去噪和恢复图像的细节。
- 最小二乘法:最小二乘法是一种基于模型的频域复原算法,它通过最小化误差函数来估计信号的参数,以恢复原始信号。
最小二乘法在图像处理中常用于图像去模糊和恢复图像的细节。
- 卡尔曼滤波:卡尔曼滤波是一种递归的频域复原算法,它通过对信号的状态进行估计和更新,以恢复原始信号。
卡尔曼滤波在图像处理中常用于图像去模糊和恢复图像的细节。
这些频域复原算法都有各自的优缺点和适用范围,需要根据具体的应用场景和需求选择合适的算法。
微弱信号检测技术的原理及应用2018年1月一、微弱信号检测的基本原理、方法及技术在自然现象和规律的科学研究和工程实践中,经常会遇到需要检测诸如地震的波形和波速、材料分析时测定荧光光强、卫星信号的接收、红外探测以及生物电信号测量等。
这些测量量被强背景噪声或检测电路的噪声所淹没,无法用传统的测量方法检测出来。
微弱信号,为了检测被背景噪声淹没的微弱信号,人们进行了长期的研究工作,分析背景噪声产生的原因和规律,研究被测信号的特点、相关性以及噪声的统计特性,以寻找出从背景噪声中检测出目标信号的方法。
微弱信号检测技术的首要任务是提高信噪比,这就需要采用电子学、信息论和物理学的方法,以便从强噪声中检测出有用的微弱信号。
微弱信号检测技术不同于一般的检测技术,主要是考虑如何抑制噪声和提高信嗓比,因此可以说,微弱信号检测是一门专门抑制噪声的技术。
抑制噪声的现代信号处理手段的理论基础是概率论、数理统计和非线性科学。
1、经典检测与估计理论时期这一时期检测理论主要是建立在统计学家工作的基础上的。
美国科学家WienerN .将随机过程和数理统计的观点引入到通信和控制系统中,提出了信息传输和处理过程的统计本质,建立了最佳线性滤波理论,即维纳滤波理论。
NorthD.O.于1943年提出以输出最大信噪比为准则的匹配滤波器理论;1946年卡切尼科夫(BA.K)提出了错误判决概率为最小的理想接收机理论,证明了理想接收机应在其输出端重现出后验概率为最大的信号,即是将最大后验概率准则作为一个最佳准则。
1950年在仙农信息理论的基础上,WoodwardP.M.把信息量的概念用于雷达信号的检测中,提出了理想接收机应能从接收到的信号加噪声的混合波形中提取尽可能多的有用信息。
但要知道后验概率分布。
所以,理想接收机应该是一个计算后验概率分布的装里。
1953年以后,人们直接利用统计推断中的判决和统计理论来研究雷达信号检测和参盘估计。
密德尔顿(Middleton D)等用贝叶斯准则(最小风险准则)来处理最佳接收问题,并使各种最佳准则统一于风险理论。
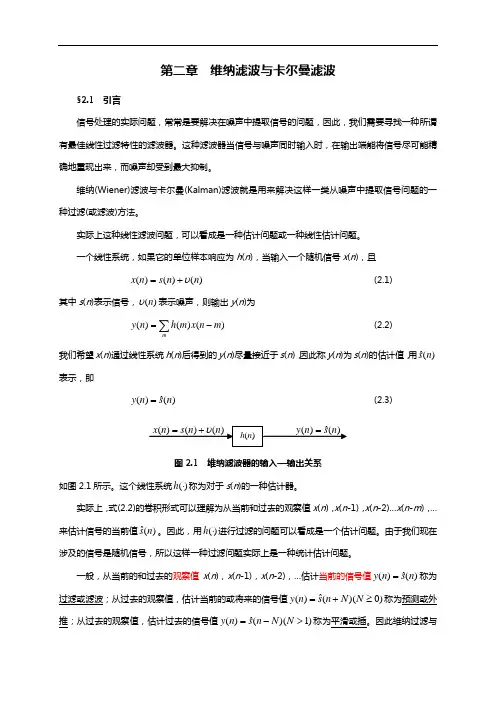
第二章 维纳滤波与卡尔曼滤波§2.1 引言信号处理的实际问题,常常是要解决在噪声中提取信号的问题,因此,我们需要寻找一种所谓有最佳线性过滤特性的滤波器。
这种滤波器当信号与噪声同时输入时,在输出端能将信号尽可能精确地重现出来,而噪声却受到最大抑制。
维纳(Wiener)滤波与卡尔曼(Kalman)滤波就是用来解决这样一类从噪声中提取信号问题的一种过滤(或滤波)方法。
实际上这种线性滤波问题,可以看成是一种估计问题或一种线性估计问题。
一个线性系统,如果它的单位样本响应为h (n ),当输入一个随机信号x (n ),且)()()(n n s n x υ+=(2.1)其中s (n )表示信号,)(n υ表示噪声,则输出y (n )为∑-=mm n x m h n y )()()((2.2)我们希望x (n )通过线性系统h (n )后得到的y (n )尽量接近于s (n ),因此称y (n )为s (n )的估计值,用)(ˆn s表示,即)(ˆ)(n sn y = (2.3)图2.1 维纳滤波器的输入—输出关系如图2.1所示。
这个线性系统)(⋅h 称为对于s (n )的一种估计器。
实际上,式(2.2)的卷积形式可以理解为从当前和过去的观察值x (n ),x (n -1),x (n -2)…x (n -m ),…来估计信号的当前值)(ˆn s。
因此,用)(⋅h 进行过滤的问题可以看成是一个估计问题。
由于我们现在涉及的信号是随机信号,所以这样一种过滤问题实际上是一种统计估计问题。
一般,从当前的和过去的观察值x (n ),x (n -1),x (n -2),…估计当前的信号值)(ˆ)(n s n y =称为过滤或滤波;从过去的观察值,估计当前的或将来的信号值)0)((ˆ)(≥+=N N n sn y 称为预测或外推;从过去的观察值,估计过去的信号值)1)((ˆ)(>-=N N n sn y 称为平滑或插。

实验五不同滤波器的比较比较维纳滤波器、卡尔曼滤波器、匹配滤波器、自适应滤波器的异同一、维纳滤波器维纳滤波器是由数学家维纳提出的一种以最小平方为最优准则的线性滤波器。
在一定的约束条件下,其输出与一给定函数(通常称为期望输出)的差的平方达到最小,通过数学运算最终可变为一个托布利兹方程的求解问题。
维纳滤波是利用平稳随机过程的相关特性和频谱特性对混有噪声的信号进行滤波的方法。
设维纳滤波器的输入为含噪声的随机信号。
期望输出与实际输出之间的差值为误差,对该误差求均方,即为均方误差。
因此均方误差越小,噪声滤除效果就越好。
为使均方误差最小,关键在于求冲激响应。
如果能够满足维纳-霍夫方程,就可使维纳滤波器达到最佳。
根据维纳-霍夫方程,最佳维纳滤波器的冲激响应,完全由输入自相关函数以及输入与期望输出的互相关函数所决定。
维纳滤波器的优点是适应面较广,无论平稳随机过程是连续的还是离散的,是标量的还是向量的,都可应用。
对某些问题,还可求出滤波器传递函数的显式解,并进而采用由简单的物理元件组成的网络构成维纳滤波器。
维纳滤波器的缺点是,要求得到半无限时间区间内的全部观察数据的条件很难满足,同时它也不能用于噪声为非平稳的随机过程的情况,对于向量情况应用也不方便。
因此,维纳滤波在实际问题中应用不多。
实现维纳滤波的要求是:①输入过程是广义平稳的;②输入过程的统计特性是已知的。
根据其他最佳准则的滤波器亦有同样要求。
二、卡尔曼滤波器卡尔曼滤波是一种高效率的递归滤波器(自回归滤波器), 它能够从一系列的不完全及包含噪声的测量中,估计动态系统的状态。
状态估计是卡尔曼滤波的重要组成部分。
一般来说,根据观测数据对随机量进行定量推断就是估计问题,特别是对动态行为的状态估计,它能实现实时运行状态的估计和预测功能。
最常用的是最小二乘估计,线性最小方差估计、最小方差估计、递推最小二乘估计等。
卡尔曼提出的递推最优估计理论,采用状态空间描述法,在算法采用递推形式,卡尔曼滤波能处理多维和非平稳的随机过程。
随机信号或随机过程(random process)是普遍存在的。
一方面,任何确定性信号经过测量后往往就会引入随机性误差而使该信号随机化;另一方面,任何信号本身都存在随机干扰,通常把对信号或系统功能起干扰作用的随机信号称之为噪声。
噪声按功率谱密度划分可以分为白噪声(white noise )和色噪声(color noise ),我们把均值为0的白噪声叫纯随机信号(pure random signal )。
因此,任何其它随机信号都可看成是纯随机信号与确定性信号并存的混合随机信号或简称为随机信号。
要区别干扰(interference )和噪声( noise)两种事实和两个概念。
非目标信号(nonobjective signal )都可叫干扰。
干扰可以是确定信号,如国内的50Hz 工频干扰。
干扰也可以是噪声,纯随机信号(白噪声)加上一个直流成分(确定性信号),就成了最简单的混合随机信号。
医学数字信号处理的目的是要提取包含在随机信号中的确定成分,并探求它与生理、病理过程的关系,为医学决策提供一定的依据。
例如从自发脑电中提取诱发脑电信号,就是把自发脑电看成是干扰信号,从中提取出需要的信息成分。
因此我们需要寻找一种最佳线性滤波器,当信号和干扰以及随机噪声同时输入该滤波器时,在输出端能将信号尽可能精确地表现出来。
维纳滤波和卡尔曼滤波就是用来解决这样一类问题的方法:从噪声中提取出有用的信号。
实际上,这种线性滤波方法也被看成是一种估计问题或者线性预测问题。
由当前时刻的观测值和过去时刻的观测值、、…的估计值。
用当前的和过去的观测值来估计当前的信号称为滤波;用过去的观测值来估计当前的或将来的信号,N ,称为预测;用过去的观测值来估计过去的信号,N ,称为平滑或者内插。
本章将讨论滤波和预测问题。
维纳滤波和卡尔曼滤波都是解决线性滤波和预测问题的方法,并且都是以均方误差最小为准则的,在平稳条件下两者的稳态结果是一致的。
但是它们解决问题的方法有很大区别。