同步电机数学模型
- 格式:docx
- 大小:176.23 KB
- 文档页数:8
![新编[工学]高等电力系统之同步电机数学模型](https://uimg.taocdn.com/0f593fdf0242a8956bece49e.webp)
上篇 电力系统元件数学模型1 同步电机数学模型1.1 abc 坐标下的有名值方程1.1.1 理想电机同步电机是电力系统的心脏,它是一种集旋转与静止、电磁变化与机械运动于一体,实现电能与机械能变换的元件,其动态性能十分复杂,而且其动态性能又对全电力系统的动态性能有极大影响,因此应对它作深入分析,以便建立用于研究分析电力系统各种物理问题的同步电机数学模型。
为了建立同步电机的数学模型,必须对实际的三相同步电机作必要的假定,以便简化分析计算。
通常假定:(1)电机磁铁部分的磁导率为常数,既忽略掉磁滞、磁饱和的影响,也不计涡流及集肤作用等的影响。
(2)对纵轴及横轴而言,电机转子在结构上是完全对称的。
(3)定子的3个绕组的位置在空间互相相差120º电角度,3个绕组在结构上完全相同。
同时,它们均在气隙中产生正弦形分布的磁动势。
(4)定子及转子的槽及通风沟等不影响电机定子及转子的电感,即认为电机的定子及转子具有光滑的表面。
满足上述假定条件的电机称为理想电机。
这些假定在大多数情况下已能满足实际工程问题研究的需要,下面的同步电机基本方程推导即基于上述理想电机的假定。
当需要考虑某些因素(如磁饱和等)时,则要对基本方程作相应修正。
图1-l 是双极理想电机的示意图,图中标明了各绕组电磁量的正方向。
必须特别强调的是,后面导出的同步电机基本方程是与图1-l 中所定义的电磁量正方向相对应的。
下面对图1-1中所定义的各电磁量正方向作必要的说明。
定子abc 三相绕组的对称轴a ,b ,c 空间互差120º电角度。
设转子逆时针旋转为旋转正方向,则其依次与静止的a ,b ,c 三轴相遇。
定子三相绕组磁链c b a ΨΨΨ,,的正方向分别与a ,b ,c 三轴正方向一致。
定子三相电流c b a i i i ,,的正方向如图1-1所示。
正值相电流产生相应相的负值磁动势和磁链。
这种正方向设定与正常运行时定子电流的去磁作用(电枢反应)相对应,有利于分析计算。
同步电机系统传递函数模型和状态空间模型同步电机系统传递函数模型和状态空间模型引言同步电机是一种重要的电动机类型,广泛应用于工业领域。
为了能够准确描述同步电机的运行特性,传递函数模型和状态空间模型是常用的数学工具。
本文将从基础理论出发,系统地介绍同步电机系统的传递函数模型和状态空间模型。
同步电机的传递函数模型传递函数模型是用来描述系统输入和输出之间关系的数学模型。
同步电机的传递函数模型可以通过对其系统方程进行 Laplace 变换获得。
系统方程同步电机的系统方程可以用以下形式表示:G(s)⋅I(s)=E(s)其中,G(s)是系统的传递函数,I(s)是电机的输入信号(电流),E(s)是电机的输出信号(电动势)。
传递函数通过对系统方程进行变换,可以得到同步电机的传递函数:G(s)=E(s) I(s)同步电机的传递函数一般为一个复数多项式的比值。
同步电机的状态空间模型状态空间模型是一种更加直观、直接的描述系统动态行为的数学模型。
同步电机的状态空间模型可以通过将系统方程转换成状态方程的形式来表示。
状态方程同步电机的状态方程可以用以下形式表示:dx(t)=Ax(t)+Bu(t)dty(t)=Cx(t)+Du(t)其中,x(t)是状态向量(包含电机的各种状态),u(t)是输入向量(电机的输入信号),y(t)是输出向量(电机的输出信号),A、B、C和D是系统的系数矩阵。
系数矩阵系数矩阵A是描述状态变量之间相互关系的矩阵,矩阵的维度与状态量的个数相同。
系数矩阵B是描述输入信号对状态变量的影响的矩阵,矩阵的维度与输入量的个数相同。
系数矩阵C是描述状态变量对输出信号的影响的矩阵,矩阵的维度与输出量的个数相同。
系数矩阵D是描述直接影响输出信号的输入信号的矩阵。
状态空间模型的优势与传递函数模型相比,状态空间模型具有以下优势: 1. 直观性:状态空间模型能够更加直接、直观地描述系统的动态行为。
2. 灵活性:状态空间模型能够更加灵活地处理多输入多输出系统。
(1)两相静止坐标下永磁同步电动机的数学模型永磁同步电动机是一种采用永磁体产生磁场的电机,其具有高效率、高功率密度、高转速响应等优点,在工业和交通领域得到广泛应用。
了解永磁同步电动机的数学模型对于设计和控制该电机具有重要意义。
永磁同步电动机的数学模型可以分为两个坐标系,即静止坐标系和旋转坐标系。
在静止坐标系下,电机的动态方程可以表示为:dψ_s/dt = (V_s - R_s * i_s - L_s * di_s/dt)/Lm其中,ψ_s是永磁体磁链,V_s是电机的定子电压,R_s是定子电阻,i_s是定子电流,L_s是定子电感,Lm是磁链互感。
这个方程描述了静止坐标系下永磁同步电动机的电磁特性。
在旋转坐标系下,电机的动态方程可以表示为:dψ_r/dt = (V_r - R_r * i_r - L_r * di_r/dt)/Lm其中,ψ_r是旋转坐标系下的磁链,V_r是电机的转子电压,R_r 是转子电阻,i_r是转子电流,L_r是转子电感。
这个方程描述了旋转坐标系下永磁同步电动机的电磁特性。
根据上述两个动态方程,可以计算出电机的磁链、电流和电压等相关参数。
同时,可以通过对这些参数的控制,实现对电动机的转矩、速度和位置等性能的控制。
除了上述动态方程,永磁同步电动机的数学模型还包括转子位置估算、磁链定向控制和电流控制等算法。
这些算法可以帮助实现电动机的高效率和高性能运行。
在实际应用中,可以根据具体需求选择合适的数学模型,并结合控制策略,来实现永磁同步电动机的精确控制。
这些数学模型和算法为电机的设计、控制和优化提供了重要的理论基础。
总之,了解永磁同步电动机的数学模型对于实现其高效率和高性能运行具有重要意义。
通过深入研究和应用数学模型,可以更好地理解和控制永磁同步电动机的电磁特性,从而提高电机的工作效率和性能。
永磁同步电机数学模型建立永磁同步电机是一种常用的电动机类型,具有高效率、高功率密度和高控制精度等优点,在工业和交通领域得到广泛应用。
为了实现对永磁同步电机的控制和优化设计,需要建立其数学模型。
本文将介绍永磁同步电机的数学模型建立过程,并对其进行详细分析。
首先,永磁同步电机的数学模型可以分为两个部分:电磁模型和机械模型。
电磁模型描述了电机的电磁特性,包括电机的电感、电阻和磁链等参数;机械模型描述了电机的机械特性,包括电机的转动惯量、摩擦力和负载扭矩等参数。
在电磁模型中,首先需要建立电机的磁链方程。
磁链方程描述了电机的磁链与电机的电流之间的关系。
对于永磁同步电机而言,其磁链方程可以表示为:ψ= Ld * id + Lq * iq其中,ψ表示电机的磁链,Ld和Lq分别表示电机的d轴和q轴的电感,id和iq分别表示电机的d轴和q轴的电流。
接下来,需要建立电机的电流方程。
电流方程描述了电机的电流与电机的电压之间的关系。
对于永磁同步电机而言,其电流方程可以表示为:ud = R * id + ω* Lq * iq + ω* ψuq = R * iq - ω* Ld * id其中,ud和uq分别表示电机的d轴和q轴的电压,R表示电机的电阻,ω表示电机的角速度。
在机械模型中,首先需要建立电机的转动方程。
转动方程描述了电机的转动惯量与电机的转矩之间的关系。
对于永磁同步电机而言,其转动方程可以表示为:J * dω/dt = Tm - Tl - Tf其中,J表示电机的转动惯量,Tm表示电机的电磁转矩,Tl表示电机的负载转矩,Tf表示电机的摩擦转矩。
最后,需要建立电机的速度方程。
速度方程描述了电机的速度与电机的转矩之间的关系。
对于永磁同步电机而言,其速度方程可以表示为:dθ/dt = ω其中,θ表示电机的转角,ω表示电机的角速度。
通过以上的数学模型,可以对永磁同步电机进行建模和仿真,实现对电机的控制和优化设计。
在实际应用中,可以通过调节电机的电流和电压来控制电机的转矩和速度,从而实现对电机的精确控制。
上篇 电力系统元件数学模型1 同步电机数学模型1.1 abc 坐标下的有名值方程1.1.1 理想电机同步电机是电力系统的心脏,它是一种集旋转与静止、电磁变化与机械运动于一体,实现电能与机械能变换的元件,其动态性能十分复杂,而且其动态性能又对全电力系统的动态性能有极大影响,因此应对它作深入分析,以便建立用于研究分析电力系统各种物理问题的同步电机数学模型。
为了建立同步电机的数学模型,必须对实际的三相同步电机作必要的假定,以便简化分析计算。
通常假定:(1)电机磁铁部分的磁导率为常数,既忽略掉磁滞、磁饱和的影响,也不计涡流及集肤作用等的影响。
(2)对纵轴及横轴而言,电机转子在结构上是完全对称的。
(3)定子的3个绕组的位置在空间互相相差120º电角度,3个绕组在结构上完全相同。
同时,它们均在气隙中产生正弦形分布的磁动势。
(4)定子及转子的槽及通风沟等不影响电机定子及转子的电感,即认为电机的定子及转子具有光滑的表面。
满足上述假定条件的电机称为理想电机。
这些假定在大多数情况下已能满足实际工程问题研究的需要,下面的同步电机基本方程推导即基于上述理想电机的假定。
当需要考虑某些因素(如磁饱和等)时,则要对基本方程作相应修正。
图1-l 是双极理想电机的示意图,图中标明了各绕组电磁量的正方向。
必须特别强调的是,后面导出的同步电机基本方程是与图1-l 中所定义的电磁量正方向相对应的。
下面对图1-1中所定义的各电磁量正方向作必要的说明。
定子abc 三相绕组的对称轴a ,b ,c 空间互差120º电角度。
设转子逆时针旋转为旋转正方向,则其依次与静止的a ,b ,c 三轴相遇。
定子三相绕组磁链c b a ΨΨΨ,,的正方向分别与a ,b ,c 三轴正方向一致。
定子三相电流c b a i i i ,,的正方向如图1-1所示。
正值相电流产生相应相的负值磁动势和磁链。
这种正方向设定与正常运行时定子电流的去磁作用(电枢反应)相对应,有利于分析计算。
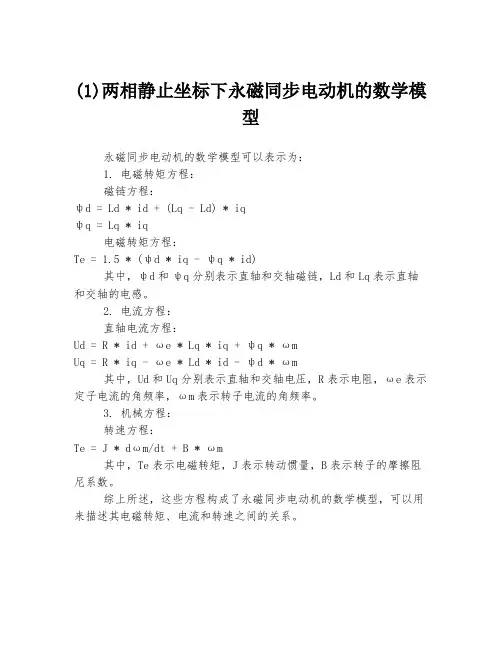
(1)两相静止坐标下永磁同步电动机的数学模
型
永磁同步电动机的数学模型可以表示为:
1. 电磁转矩方程:
磁链方程:
ψd = Ld * id + (Lq - Ld) * iq
ψq = Lq * iq
电磁转矩方程:
Te = 1.5 * (ψd * iq - ψq * id)
其中,ψd和ψq分别表示直轴和交轴磁链,Ld和Lq表示直轴和交轴的电感。
2. 电流方程:
直轴电流方程:
Ud = R * id + ωe * Lq * iq + ψq * ωm
Uq = R * iq - ωe * Ld * id - ψd * ωm
其中,Ud和Uq分别表示直轴和交轴电压,R表示电阻,ωe表示定子电流的角频率,ωm表示转子电流的角频率。
3. 机械方程:
转速方程:
Te = J * dωm/dt + B * ωm
其中,Te表示电磁转矩,J表示转动惯量,B表示转子的摩擦阻尼系数。
综上所述,这些方程构成了永磁同步电动机的数学模型,可以用来描述其电磁转矩、电流和转速之间的关系。
永磁同步电机的复数数学模型
永磁同步电机是一种采用永磁体作为励磁源的同步电机,其复
数数学模型可以通过磁动势方程和电磁转矩方程来描述。
首先,我
们可以从永磁同步电机的磁动势方程入手。
磁动势方程描述了永磁
同步电机中磁场的分布和变化规律。
其数学表达式为:
∇ × H = J + ∂D/∂t.
其中,∇ × H表示磁场的旋度,J表示电流密度,D表示电位
移矢量。
这个方程描述了磁场随时间和电流分布的变化关系。
接下来是永磁同步电机的电磁转矩方程。
电磁转矩方程描述了
电机在给定电流下产生的转矩。
其数学表达式为:
T_e = 1.5 (P/2) (ψ_m I_q ψ_q I_m)。
其中,T_e表示电磁转矩,P表示极对数,ψ_m和ψ_q分别表
示磁通链和电流的磁链,I_q和I_m分别表示电流的直轴分量和交
轴分量。
这个方程描述了电机的输出转矩与磁链和电流之间的关系。
综合考虑磁动势方程和电磁转矩方程,可以建立永磁同步电机的复数数学模型。
在这个模型中,磁链、电流和转矩可以用复数表示,从而方便进行分析和控制。
通过对这个复数数学模型的分析,可以设计出高效、精准的永磁同步电机控制策略,实现电机的高性能运行。
除了上述的磁动势方程和电磁转矩方程,永磁同步电机的复数数学模型还涉及到电机的参数、转子和定子的磁链方程、电流方程等内容。
这些内容综合起来构成了永磁同步电机的全面复数数学模型,为电机的分析、设计和控制提供了重要的理论基础。
同步电机的基本方程式及数学模型派克方程1。
1 理想电机假设(1)电机磁铁部分的磁导率为常数,因此可以忽略掉磁滞、磁饱和的影响,也不计涡流及集肤效应作用等的影响;(2)定子的三个绕组的位置在空间互相相差120°电角度,3个绕组在结构上完全相同。
同时,他们均在气隙中产生正弦分布的磁动势;(3)定子及转子的槽及通风沟等不影响电机定子及转子的电感,因此认为电机的定子及转子具有光滑的表面;为了分析计算,还需要设定绕组电流、磁链正方向。
1.2 abc 坐标下的有名值方程同步电机共有6个绕组分别为:定子绕组a,b,c ,转子励磁绕组f ,转子d 轴阻尼绕组D 以及转子q 轴阻尼绕组Q 。
需要求出每个绕组的电压、电流和磁链未知数,因此一共需要18个方程才能求解。
电压方程:00a a a ab b b b cc c c f f f f D D D D QQ Q Q u p r i u p r i u p r iu p r i u p r i u p r i ψψψψψψ=-⎧⎪=-⎨⎪=-⎩=-⎧⎪=-≡⎨⎪=-≡⎩D 绕组与Q 绕组均为无外接电源闭合绕组,因此电压均为0,从而上式中一共有8个方程。
磁链方程:11a a aa ab ac af aD aQ b b ba bb bc bf bD bQ c c ca cb cc cf cD cQ f f fa fb fc ff fD fQ Da Db Dc Df DD DQ D D Qa Qb Qc Qf QDQQ Q Q i L L L L L L i L L L L L L i L L L L L L i L L L L L L L L L L L L i L L L L L L i L ψψψψψψ-⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦=(33)12(33)21(33)22(33)abc fDQ i L L L i ⨯⨯⨯⨯-⎡⎤⎡⎤⎢⎥⎢⎥⎣⎦⎣⎦在电感矩阵中(针对凸极机),定子绕组自感和互感参数是随转子位置而变化的参数,而在转子绕组中,转子的自感和互感参数均为常数,而且D 轴与Q 轴正交,则D 轴绕组与Q轴绕组互感为0。
PMSM 电机在旋转dq 坐标系中定子电压和定子磁链方程为d ds d q q qs q d d d d f qq q d u R i dtd u R i dtL i L iψωψψωψψψψ⎧=+-⎪⎪⎪=++⎨⎪=+⎪⎪=⎩ (1)d u ,q u 为d 、q 轴的定子电压;d L ,q L 为d 、q 轴的电枢电感,对于隐极电机来说d L =q L =L ; d i ,q i 为d 、q 轴的电枢电流;d ψ,q ψ为d 、q 轴的定子磁链;s R 为电枢绕组电阻;f ψ为永磁铁产生的磁链,为常量;ω为电机电角速度,有r p ωω=,p 为电机的极对数,r ω为电机转子角速度;由式(1)推出:11d sd r q d q f s r d q r q di R i p i u dt L Ldi p R p i i u dtL L L ωψωω-⎧=++⎪⎪⎨--⎪=-+++⎪⎩ (2)PMSM 电机在旋转dq 坐标系中电磁转矩方程为()()1.5 1.5 1.5e d q q d d q d q f q f qT p i i p L L i i i p i ψψψψ=-⎡⎤=-+⎣⎦= (3)PMSM 电机的转子动力学方程为re m r d T T b Jdtωω--= (4)e T 为电机的电磁转矩; m T 为电机的负载扭矩;b 为电机的阻尼系数; J 为电机的转动惯量;由式(3)式(4)可以推出1.5f m r q r p T d bi dt J J Jψωω--=++ (5)状态方程为X AX Bu C =++选取,d d q q r i u X i u u ω⎛⎫⎛⎫ ⎪== ⎪ ⎪⎝⎭ ⎪⎝⎭,由式(2)式(5)推出10001,0,01.5000s r f s rm f R p L L p R A p B C L LL T p b J JJ ωψωψ⎛⎫⎛⎫-⎛⎫⎪ ⎪ ⎪ ⎪ ⎪⎪⎪ ⎪=---== ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪⎪ ⎪-⎝⎭ ⎪ ⎪⎝⎭⎝⎭。
同步电机的基本方程式及数学模型派克方程1.1 理想电机假设(1)电机磁铁部分的磁导率为常数,因此可以忽略掉磁滞、磁饱和的影响,也不计涡流及集肤效应作用等的影响;(2)定子的三个绕组的位置在空间互相相差120°电角度,3个绕组在结构上完全相同。
同时,他们均在气隙中产生正弦分布的磁动势;(3)定子及转子的槽及通风沟等不影响电机定子及转子的电感,因此认为电机的定子及转子具有光滑的表面;为了分析计算,还需要设定绕组电流、磁链正方向。
1.2 abc 坐标下的有名值方程同步电机共有6个绕组分别为:定子绕组a,b,c ,转子励磁绕组f ,转子d 轴阻尼绕组D 以及转子q 轴阻尼绕组Q 。
需要求出每个绕组的电压、电流和磁链未知数,因此一共需要18个方程才能求解。
电压方程:00a a a ab b b b cc c c f f f f D D D D QQ Q Q u p r i u p r i u p r iu p r i u p r i u p r i ψψψψψψ=-⎧⎪=-⎨⎪=-⎩=-⎧⎪=-≡⎨⎪=-≡⎩D 绕组与Q 绕组均为无外接电源闭合绕组,因此电压均为0,从而上式中一共有8个方程。
磁链方程:11a a aa ab ac af aD aQ b b ba bb bc bf bD bQ c c ca cb cc cf cD cQ f f fa fb fc ff fD fQ Da Db Dc Df DD DQ D D Qa Qb Qc Qf QDQQ Q Q i L L L L L L i L L L L L L i L L L L L L i L L L L L L L L L L L L i L L L L L L i L ψψψψψψ-⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦=(33)12(33)21(33)22(33)abc fDQ i L L L i ⨯⨯⨯⨯-⎡⎤⎡⎤⎢⎥⎢⎥⎣⎦⎣⎦在电感矩阵中(针对凸极机),定子绕组自感和互感参数是随转子位置而变化的参数,而在转子绕组中,转子的自感和互感参数均为常数,而且D 轴与Q 轴正交,则D 轴绕组与Q 轴绕组互感为0。
定子与转子之间的互感参数显然是随转子位置变化的参数。
功率、力矩及转子运动方程: (1)电机输出电功率的瞬时值e a a b b c c P u i u i u i =++输出总电功率为三相绕组输出电功率之和 (2)电磁力矩瞬时值011101110T e pabc abc T P i -⎡⎤⎢⎥=-⎢⎥⎢⎥-⎣⎦利用磁链方程以及电感参数表达式代入发电机惯例电磁力矩瞬时值表达式即可得到。
(3)转子运动方程(目的方程)1m epd J T T P dt d dtωθω⎧=-⎪⎪⎨⎪=⎪⎩ 式中,θω为电角度,电角速度小结利用电压方程、磁链方程以及转子运动方程,一共有16个方程,但是需要求解的未知数有21个(,,,,,m u i T ψωθ),因此还需要五个方程,分别为: (1) f u 励磁系统输出电压,设为已知; (2) m T 原动机输出机械力矩,设为已知;(3) 定子三相绕组与网络接口对应的3个网络方程因此,利用21个方程可以解出21个未知数,但是从方程形式上看,该方程组为非线性变微分方程,处理难度比较大。
所以,有工程师提出了变换坐标系的方法来将方程组简化为非线性常微分方程,这个变换成为派克变换(刘取的书提出派克变换是采用的前苏联学者物理解释的方法,倪以信的书采用的是数学推导的方法)。
1.3 派克变换为了解决同步电机方程中存在大量变化参数的问题,通常根据同步电机的双反应理论,把定子abc 三相绕组经过适当变换而等值成2个分别固定在d 、q 轴上,并与转子同步旋转的等值定子绕组,这种变换就称为派克变换。
经过派克变换后所得的dq0坐标下的同步电机方程中的电感参数均为定常值,有助于实用计算。
经典派克变换推导变换前后的等值条件,即空间磁动势相等:a b c d q f f f f f f ∑=++=+又d ,q 相互正交,则可以得出下式:cos cos cos sin sin sin a d a b c b q abc c f f f f f θθθθθθ⎡⎤⎡⎤⎡⎤⎢⎥=⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦⎢⎥⎣⎦其中,,,,,a b c d q f f f f f 是相应轴上的投影,,,a b c θθθ为d 轴领先a ,b ,c 轴的电角度,且q 轴领先d 轴90°。
稳态对称运行时,,,a b c f f f 在时间上互差120°相位,即:cos cos(120)cos(120)a b cf F tf F t f F t ωωω=⎧⎪=-⎨⎪=+⎩ 其中F 为空间磁动势。
当d 轴与a 轴重合,且电网角频率与转子电角速同步时,则有:120120a b ct t t θωθωθω=⎧⎪=-⎨⎪=-⎩ 联立以上三式,可得:320dq f F f ⎧=⎪⎨⎪=⎩为了消去系数32,于是在变换矩阵前再加上一个因子,取为23。
cos cos cos 2sin sin sin 3a d ab c b q abc c f f f f f θθθθθθ⎡⎤⎡⎤⎡⎤⎢⎥=⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦⎢⎥⎣⎦计入零轴分量,完整派克变换取为:0cos cos cos 2sin sin sin 3111222abc d a a b c q b c f f f f f f θθθθθθ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥---⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦⎣⎦ 经典派克变换矩阵为:cos cos cos 2sin sin sin 3111222a b c ab c D θθθθθθ⎡⎤⎢⎥---⎢⎥=⎢⎥⎢⎥⎣⎦派克变换小结派克变换的最大特点是通过在d 和q 旋转坐标上观察电机电磁量,能更好地与转子旋转和凸极效应问题相适应。
经典派克变换也存在两个缺点,其一,经典派克变换在功率上不守恒,其二,利用派克变换将abc 坐标下的同步电机有名值方程转换为dq0坐标下的有名值方程时,对应的dq0坐标下有名值电感矩阵中有些互感不可逆。
1.4 dq0坐标下的有名值方程基本过程与abc 坐标下的有名值方程几乎相同,将等式两边同时乘以(33)(33)(33)(33)00D I ⨯⨯⨯⨯⎡⎤⎢⎥⎣⎦,会涉及相对复杂的数学推导,证明略去(见倪以信书)。
电压方程:00000000dq dq dq dq dq fDQ fDQ abc abc i u S r p r i u ψψ-⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤=++⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦其中00q dq d S ωψωψ-⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,为速度电动势。
磁链方程:00dq dq SSSR RSRR fDQ fDQ i L L L L i ψψ-⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦其中SSSR RS RR L L L L ⎡⎤⎢⎥⎣⎦为常数阵,但并不对称。
功率、力矩及转子运动方程:功率方程003()32e d d q q P u i u i u i =++电磁力矩方程3()2e pd q q d T P i i ψψ=- 转子运动方程1m ep d J T T P dtd dtωθω⎧=-⎪⎪⎨⎪=⎪⎩ 小结未知数以及方程数与abc 坐标有名值方程相同,而不同的是互感矩阵中个元素变为常数,这就使得解该方程组成为可能。
同步电机标幺制2.1 标幺值系统的选择原则(1)标幺基值的选取应使各种电路或力学定律相应的有名值方程和标幺值方程形式相同,从而使同步电机标幺值方程和有名值方程有相同的形式。
(2)标幺值方程中互感完全可逆,相应电感矩阵为对称阵 (3)选取适当基值,使传统的标幺电机参数保留在电机方程中 一般采用X ad 基值系统2.2 各绕组的基值公用基值502314.16/1B B B B Bf Hzf rad s t ωπω==≈=定子绕组基值aB R i =即额定相电流的峰值aB R u =即额定相电压的峰值,aB aB R ψ依照定义计算即可。
励磁绕组及阻尼绕组基值任选电压、电流(,fB fB u i )作为基值,并依靠该基值计算出其他基值。
阻尼绕组的确定方法类似。
2.3 原则应用(1)定子绕组与励磁绕组标幺值互感可逆的约束条件fB aB S S =同理,定子绕组与阻尼绕组也满足这样的约束条件。
则可以推得:32afB faB afB L L L ⎧=⎪⎪⎨⎪=⎪⎩定子绕组与阻尼绕组类似。
(2)保留传统的标幺电机参数的约束B df fB ad aB L i X i ω=(从定义推得的)阻尼绕组满足类似的约束条件。
2.4 dq0坐标下的标幺值方程电压方程与有名值电压方程相同 磁链方程电感矩阵变为对称阵,且矩阵中的值与发电机电抗值相对应。
功率、力矩及转子运动方程功率方程:002e d d q q P u i u i u i =++ 力矩方程:e d q q d T i i ψψ=-以上两方程仅与有名值方程有系数3/2的区别。
转子运动方程1J m e d T T T dtd dtωδω⎧=-⎪⎪⎨⎪=-⎪⎩ 转子加速度方程在速度变化不大的暂态过程中,可近似认为m e m e T T P P -=-同步电机实用模型重要假设:(1) 忽略定子绕组暂态,从而令定子电压微分方程中0d q p p ψψ==; (2) 定子电压方程中1ω≈;3.1 三阶实用模型(忽略阻尼绕组D 、Q )适用范围:精度要求不十分高,但仍需要计及励磁系统动态的电力系统动态分析中,较适用于凸极机。
基本过程:为了消去转子励磁绕组变量,引入3个定子侧等效实用变量,然后再利用3个磁链方程消去d 轴磁链,q 轴磁链和励磁电流,从而在最终同步电机模型中保留,,,',,,dq dq f q m u i E E T ωδ等9个变量,其中',,q E ωδ为状态量,电机方程由3个电压方程,2个转子运动方程组成,当,f m E T 已知,并和网络d 轴,q 轴方程联立,从而求解。
三阶模型方程组:d 轴,q 轴网络方程。
七个方程即可解出七个未知数。
3.2 五阶实用模型适用范围:对电力系统暂态稳定分析的精度要求较高,可忽略定子电磁暂态,而计及转子阻尼绕组作用的分析计算基本过程:基本过程与三阶模型推导过程基本类似,但是未知量变多了。
因为0D Q u u ==,则所含变量为,,,,,dqf dqfDQ dqfDQ m u i T ψωδ,其中f u 用f E 取代,再用5个磁链方程消去3个转子电流,fDQ dq i ψ,而,,f D Q ψψψ则用','',''q q d E E E 实用变量取代。