异步电机数学模型
- 格式:doc
- 大小:1.32 MB
- 文档页数:6
异步电机的数学模型是一个高阶、非线性、强耦合的多变量系统[1]。
在研究异步电机的多变量数学模型时,常作如下假设:(1)三相绕组在空间对称互差ο120,磁势在空间按正弦分布; (2)忽略铁芯损耗;(3)不考虑磁路饱和,即认为各绕组间互感和自感都是线性的; (4)不考虑温度和频率变化对电机参数的影响。
异步电机在两相静止坐标系上的数学模型:仿真的基本思想是利用物理的或数学的模型来类比模仿现实过程,以寻求过程和规律。
在实际过程中,系统可能太复杂,无法求得其解析解,可以通过仿真求得其数值解。
计算机仿真是利用计算机对所研究系统的结构、功能和行为以及参与系统控制的主动者——人的思维过程和行为,进行动态性的比较和模仿,利用建立的仿真模型对系统进行研究和分析,并可将系统过程演示出来。
系统仿真软件MATLAB 不但在数值计算和符号计算方面具有强大的功能,而且在计算结果的分析和数据可视化方面有着其他类似软件难以匹敌的优势。
界面友好,编程效率高,扩展性强。
MATLAB 提供的SIMULINK 是一个用来对动态系统进行建模、仿真和分析的软件包。
SIMULINK 的目的是让用户能够把更多的精力投入到模型设计本身。
它提供了一些基本的模块,这些模块放在浏览器里面,用户可以随时调用。
当模型构造之后,用户可以进行仿真,等待结果,或者改变参数,再进行仿真。
异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统,其动态和静态特性都相当复杂。
以下将介绍用SIMULINK 如何来建立三相异步电机的计算机仿真模型,为以后的系统仿真做好准备。
经过三相静止/两相静止坐标变换及两相旋转/两相静止坐标变换,可得异步电机在两相静止坐标系上的数学模型。
电压方程:⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+--+++=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡βαβαβαβαωωωωr r s s r r r m m r r r r m r m m S m S r r s s i i i i P L R L P L L L P L R L P L P L P L R P L P L R u u u u 22110000磁链方程:⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡βαβαβαβαψψψψr r s s r mr m m sm s r r s s i i i i L L L L L L L L 00000000转矩方程:[])(0110βααββαβαr s r s m p r r s s m p e i i i i L n i i i i L n T -=⎥⎦⎤⎢⎣⎡⋅⎥⎦⎤⎢⎣⎡-⋅= 转速方程:L e rp T T dt d n J -=ω式中: m m L L 123=—οβα、、静止坐标系上定子与转子绕组间的互感,m s s L L L 123+=σ—οβα、、静止坐标系上两相定子绕组的自感,m r r L L L 123+=σ—οβα、、静止坐标系上两相转子绕组的自感,1R 、2R —定、转子电阻,L T 为负载阻转矩,J 为机组的转动惯量,p n 极对数,r ω为电机转子的旋转角速度。

异步电动机的数学模型和电压空间矢量异步电动机的数学模型异步电动机的数学模型是一个高阶、非线性、强耦合的多变量系统。
在建立其数学模型时作如下假定。
(1)电动机定、转子三相绕组完全对称,所产生的磁势在气隙空间中呈正弦分布。
(2)忽略铁芯涡流、饱和及磁滞损耗的影响,各绕组的自感和互感都是线性的。
(3)暂不考虑频率和温度变化对电机参数的影响。
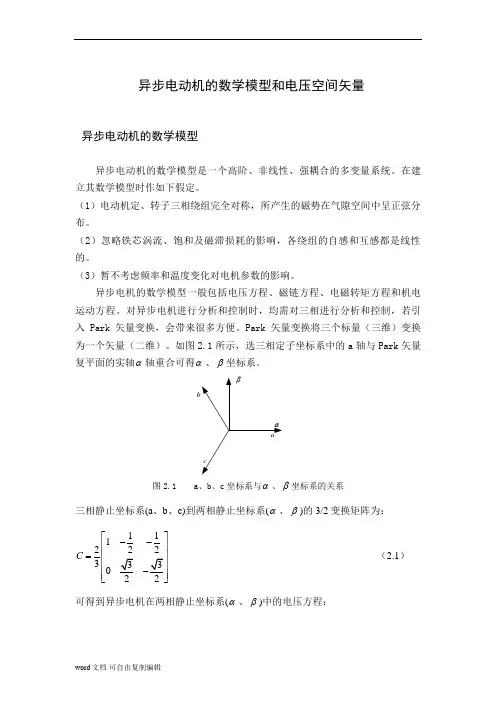
异步电机的数学模型一般包括电压方程、磁链方程、电磁转矩方程和机电运动方程。
对异步电机进行分析和控制时,均需对三相进行分析和控制,若引入Park 矢量变换,会带来很多方便。
Park 矢量变换将三个标量(三维)变换为一个矢量(二维)。
如图2.1所示,选三相定子坐标系中的a 轴与Park 矢量复平面的实轴α轴重合可得α、β坐标系。
图2.1 a 、b 、c 坐标系与α、β坐标系的关系三相静止坐标系(a 、b 、c)到两相静止坐标系(α、β)的3/2变换矩阵为:1112223022C ⎡⎤--⎢⎥⎢=⎢-⎢⎣⎦ (2.1) 可得到异步电机在两相静止坐标系(α、β)中的电压方程:0000s s s s m s s s s m r r m r mr r r r r r r mm r rr r U i R L p L p U i R L pL p U i L p L R L p L U i L L pL R L p ααββααββωωωω+⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥+⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥+⎢⎥⎢⎥⎢⎥--+⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦ (2.2) 式中:s R 、r R ――分别为定子电阻和转子电阻;s L 、r L 、m L ――分别为定子自感、转子自感和定、转子互感;r ω――电机转子角速度(电角速度);s U α、s U β――分别为定子电压的α、β分量;r U α、r U β――分别为转子电压的α、β分量,在鼠笼机中r U α=r U β=0; s i α、s i β――分别为定子电流的α、β分量; r i α、r i β――分别为转子电流的α、β分量;p ――微分算子,dp dt=。

异步电动机动态数学模型
异步电动机是目前应用最广泛的电机之一,它在各种工业和民用
领域中扮演着重要角色。
为了更好地控制异步电动机的运转,需要对
其进行动态数学模型建立。
异步电动机动态数学模型主要有两种,分别为转子定子“dq”坐
标模型和矢量控制模型。
下面针对这两种模型来进行详细介绍。
转子定子“dq”坐标模型是一种传统的动态数学模型,它通过转
子电流和定子电压的之间的相互作用来描述异步电动机的运转。
该模
型采用dq坐标系来描述电机转子和定子磁电量的动态变化规律。
在该
模型中,异步电动机的动态方程由Vdq、Idq、ω、ψd、ψq等变量的
微分方程组成,其中Vdq为定子dq坐标系瞬时电压,Idq为定子dq坐标系电流,ω为转子机械角速度,ψd和ψq分别为定子dq坐标系磁链。
矢量控制模型是一种比较新的动态数学模型,它采用磁场定向原
理来描述异步电动机的运转。
该模型通过电机磁链的矢量控制来实现
对电机的动态控制。
在该模型中,磁链矢量控制可以通过控制电机空
间矢量波的角度和大小来实现。
该模型可以使用Park变换和Clarke
变换将电机三相坐标系转换为dq坐标系,进而通过PI控制算法实现
对电机的动态控制。
总体来说,异步电动机动态数学模型可以帮助我们更好地掌握异
步电动机的运转规律,为实际控制提供指导意义。
无论采用哪种模型,
都需要进行模型参数的识别和校正,并根据具体情况确定控制策略,才能更好地实现对异步电动机的控制。
异步电机的数学模型是一个高阶、非线性、强耦合的多变量系统[1]。
在研究异步电机的多变量数学模型时,常作如下假设:(1)三相绕组在空间对称互差 120,磁势在空间按正弦分布; (2)忽略铁芯损耗;(3)不考虑磁路饱和,即认为各绕组间互感和自感都是线性的; (4)不考虑温度和频率变化对电机参数的影响。
异步电机在两相静止坐标系上的数学模型:仿真的基本思想是利用物理的或数学的模型来类比模仿现实过程,以寻求过程和规律。
在实际过程中,系统可能太复杂,无法求得其解析解,可以通过仿真求得其数值解。
计算机仿真是利用计算机对所研究系统的结构、功能和行为以及参与系统控制的主动者——人的思维过程和行为,进行动态性的比较和模仿,利用建立的仿真模型对系统进行研究和分析,并可将系统过程演示出来。
系统仿真软件MATLAB 不但在数值计算和符号计算方面具有强大的功能,而且在计算结果的分析和数据可视化方面有着其他类似软件难以匹敌的优势。
界面友好,编程效率高,扩展性强。
MATLAB 提供的SIMULINK 是一个用来对动态系统进行建模、仿真和分析的软件包。
SIMULINK 的目的是让用户能够把更多的精力投入到模型设计本身。
它提供了一些基本的模块,这些模块放在浏览器里面,用户可以随时调用。
当模型构造之后,用户可以进行仿真,等待结果,或者改变参数,再进行仿真。
异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统,其动态和静态特性都相当复杂。
以下将介绍用SIMULINK 如何来建立三相异步电机的计算机仿真模型,为以后的系统仿真做好准备。
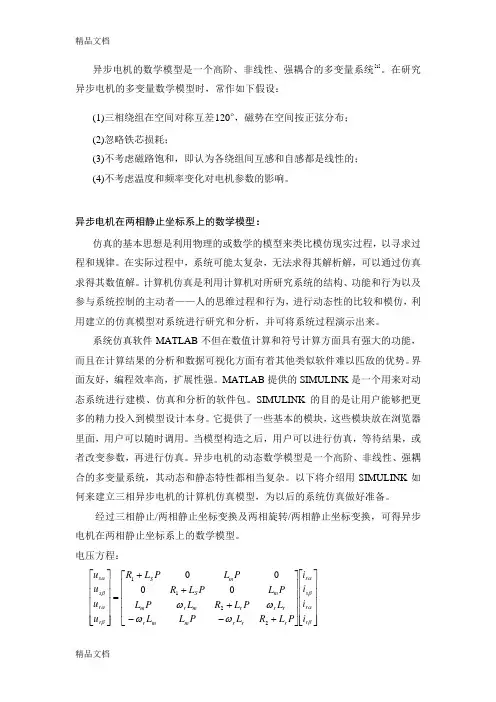
经过三相静止/两相静止坐标变换及两相旋转/两相静止坐标变换,可得异步电机在两相静止坐标系上的数学模型。
电压方程:⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+--+++=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡βαβαβαβαωωωωr r s s r r r m m r r r r m r m m S m S r r s s i i i i P L R L P L L L P L R L P L P L P L R P L P L R u u u u 22110000磁链方程:⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡βαβαβαβαψψψψr r s s r mr m m sm s r r s s i i i i L L L L L L L L 0000000转矩方程:[])(0110βααββαβαr s r s m p r r s s m p e i i i i L n i i i i L n T -=⎥⎦⎤⎢⎣⎡⋅⎥⎦⎤⎢⎣⎡-⋅= 转速方程:L e rp T T dt d n J -=ω式中: m m L L 123=—οβα、、静止坐标系上定子与转子绕组间的互感,m s s L L L 123+=σ—οβα、、静止坐标系上两相定子绕组的自感,m r r L L L 123+=σ—οβα、、静止坐标系上两相转子绕组的自感,1R 、2R —定、转子电阻,L T 为负载阻转矩,J 为机组的转动惯量,p n 极对数,r ω为电机转子的旋转角速度。
异步电机的数学模型是一个高阶、非线性、强耦合的多变量系统[1]。
在研究异步电机的多变量数学模型时,常作如下假设:
(1)三相绕组在空间对称互差 120,磁势在空间按正弦分布; (2)忽略铁芯损耗;
(3)不考虑磁路饱和,即认为各绕组间互感和自感都是线性的; (4)不考虑温度和频率变化对电机参数的影响。
异步电机在两相静止坐标系上的数学模型:
仿真的基本思想是利用物理的或数学的模型来类比模仿现实过程,以寻求过程和规律。
在实际过程中,系统可能太复杂,无法求得其解析解,可以通过仿真求得其数值解。
计算机仿真是利用计算机对所研究系统的结构、功能和行为以及参与系统控制的主动者——人的思维过程和行为,进行动态性的比较和模仿,利用建立的仿真模型对系统进行研究和分析,并可将系统过程演示出来。
系统仿真软件MATLAB 不但在数值计算和符号计算方面具有强大的功能,而且在计算结果的分析和数据可视化方面有着其他类似软件难以匹敌的优势。
界面友好,编程效率高,扩展性强。
MATLAB 提供的SIMULINK 是一个用来对动态系统进行建模、仿真和分析的软件包。
SIMULINK 的目的是让用户能够把更多的精力投入到模型设计本身。
它提供了一些基本的模块,这些模块放在浏览器里面,用户可以随时调用。
当模型构造之后,用户可以进行仿真,等待结果,或者改变参数,再进行仿真。
异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统,其动态和静态特性都相当复杂。
以下将介绍用SIMULINK 如何来建立三相异步电机的计算机仿真模型,为以后的系统仿真做好准备。
经过三相静止/两相静止坐标变换及两相旋转/两相静止坐标变换,可得异步电机在两相静止坐标系上的数学模型。
电压方程:
⎥⎥⎥⎥⎥⎦
⎤
⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+--+++=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡βαβαβαβαωωωωr r s s r r r m m r r r r m r m m S m S r r s s i i i i P L R L P L L L P L R L P L P L P L R P L P L R u u u u 22110000
磁链方程:
⎥⎥⎥⎥⎥⎦
⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡βαβαβαβαψψψψr r s s r m
r m m s
m s r r s s i i i i L L L L L L L L 0
000000
转矩方程:
[
]
)(0110βααββαβαr s r s m p r r s s m p e i i i i L n i i i i L n T -=⎥⎦
⎤
⎢⎣⎡⋅⎥
⎦⎤⎢⎣⎡-⋅= 转速方程:
L e r
p T T dt d n J -=ω
式中: m m L L 12
3
=
—οβα、、静止坐标系上定子与转子绕组间的互感,m s s L L L 123
+
=σ—οβα、、静止坐标系上两相定子绕组的自感,m r r L L L 12
3
+=σ—οβα、、静止坐标系上两相转子绕组的自感,1R 、2R —定、转
子电阻,L T 为负载阻转矩,J 为机组的转动惯量,p n 极对数,r ω为电机转子的旋转角速度。
在进行交流传动控制系统仿真时,第一步必须建立异步电动机的仿真模型。
为了使仿真结果尽可能地接近异步电动机的实际运行状况,仿真模型应该与异步电动机的原始模型尽量保持一致,在这种情况下,所得到的仿真结果才具有现实指导意义。
在这里,以两相静止οβα、、坐标系中的数学模型作为建立仿真模型的依据,该数学模型是在变换前后功率保持不变的约束条件下,经过三相静止到两相静止坐标变换得到的,不需要其他假设条件。
根据上式所列的电压、磁链、转矩和转速方程,就可得到异步电机在两相静止坐标系中的仿真模型,如图1所示。
图1 异步电机在两相静止坐标系下的模型
在图1中,
/,/Us is Us is ααββ模块实现的功能就是异步电机在两相静止坐标系上的电压方程,/,/ir ir ir ir βααβ即为磁链方程。
下面,我们来分析/,/Us is Us is ααββ模块的实现方法,以/Us is αα为例,采用电压方程的第一列:
1()s s s m r u R L p i L pi ααα=++根据这一公式,可建立模块如图2:
图2 /Us is αα模块
同样的方法,可建立/Us is ββ模型,求出s i β。
根据电机的转矩方程,可建立电机模型的转矩模块,即图中的i-Te 模块,然后根据转速方程求出转子的旋转角速度r ω。
下面我们建立电机的磁链方程,求
出电机的转子电流r i α和r i β,由于采用鼠笼式异步电机,所以电机的转子电压为0,由电压方程第3、4行转子电压方程可以得出:
20()m s r m s r r r r r L pi L i R L p i L i αβαβωω=++++ 对以上公式进行转换可得:
2///r m s r r m s r r r r r pi L pi L L i L i R i L ααββαωω=----
根据以上的公式,可建立模型/ir ir βα如图3,根据此模块可求出转子电流在α轴上的分量,同理可建立/ir ir αβ模型,求出在β轴上的分量。
图3 /ir ir βα模块
以上各个模块建立好了以后分别进行封装,然后进行连接,即可得到图1所示的电机仿真模型。
通过3/2变换,将三相静止坐标系中的电压a u 、b u 、c u 转换成两相静止坐标系上的电压αs u 、βs u (图4)。
图中,111213K K K ===
,14152
K K ==。
根据两相旋转/静止变换,将两相静止坐标系中的定子电流αs i 、βs i 转换成三相静止坐标系上的定子电流a i 、b i 、c i (图5)。
图中,2122K K ==
,23 K =
2
3
,24K =2
3
-。
图4 三相静止电压/两相静止电压
图5 两相静止电流/三相静止电流
综合图1、4、5,就能得到异步电机的仿真模型,见图6。
图6 异步电机模型
在运行电机模型时,我们需要已知的电机参数,先运行参数才可运行电机模型。
电机所用参数为一m文件,如下所示:
R1=12; %R1=1.85 ; %¶¨×Óµç×è
R2=10.7;%2.658; %R2=4.86 %ת×Óµç×è
L1=0.8097 %0.2940 %L1=0.388
L2=0.8090 %0.2898 %=0.389
Lm1=0.7104 %0.2838 %=0.370
Ls=0.8097 %0.2940 %0.388
Lr=0.8090 %0.2898 %0.389
Lm=0.7104 %0.2838 %0.370
np=2
J=0.01486*0.2 %0.1284*0.2 %0.01486*0.2
%Ts=0.001 %1k
Ts=0.0002 %5k
运行完参数程序以后,即可运行电机仿真模型,可给电机加上三相正弦电源,验证模型的正确性。