LS-DYNA显式时间步长与沙漏控制
- 格式:ppt
- 大小:2.18 MB
- 文档页数:50
利用LS-DYNA进行成形仿真的输入控制参数Translated by SunnyWinterLS-DYNA已广泛用于汽车碰撞分析。
默认的输入参数一般能给出有效,精确的碰撞模拟结果。
但是,这些默认值对于成形仿真分析并不一定理想。
下面是一个标准的金属成形过程。
为及时参考,推荐输入参数用黑体字标识,并包含在盒状关键字输入框中。
模型明确要求的数据,如终止时间等参数,输入黑体的0值。
一般问题设定在显式成形仿真中,利用质量比例缩放和(或者)人为的高工具速度,运行时间可以大大缩减。
这两种方法都会引入人为的动力学影响,因此必须将其减小到在工程意义上合理的水平。
一个单独的描述人为动力影响的参数是:工具每运动1毫米所采用的显式时间步进值(或周期)数目。
当成形过程允许大的无限的板料运动,比如冲击成形,需要更多的毫米周期数。
当板料被压边圈和冲模支撑较强的约束住时,较少的毫米周期数是必要的。
对大多数的仿真来说,100到1000之间的毫米周期数能产生合理的结果。
如果可能,或者有必要重复一个仿真,可利用两个不同的毫米周期值并比较分析结果去估计其对人为动力学影响的敏感性。
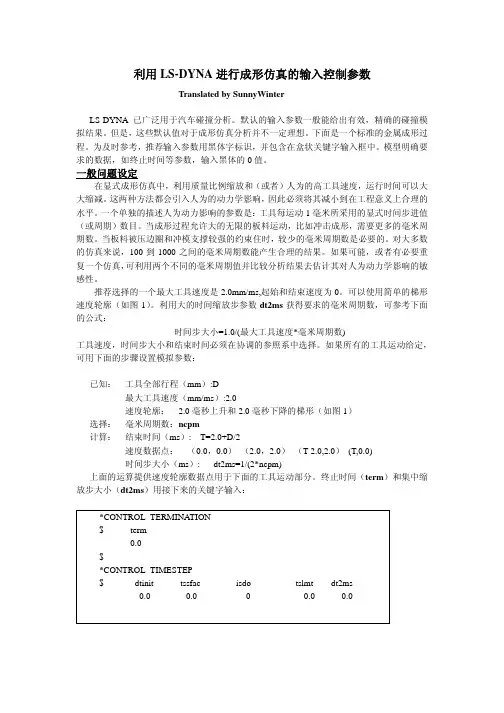
推荐选择的一个最大工具速度是2.0mm/ms,起始和结束速度为0。
可以使用简单的梯形速度轮廓(如图1)。
利用大的时间缩放步参数dt2ms获得要求的毫米周期数,可参考下面的公式:时间步大小=1.0/(最大工具速度*毫米周期数)工具速度,时间步大小和结束时间必须在协调的参照系中选择。
如果所有的工具运动给定,可用下面的步骤设置模拟参数:已知:工具全部行程(mm):D最大工具速度(mm/ms):2.0速度轮廓: 2.0毫秒上升和2.0毫秒下降的梯形(如图1)选择:毫米周期数:ncpm计算:结束时间(ms): T=2.0+D/2速度数据点:(0.0,0.0)(2.0,2.0)(T-2.0,2.0) (T,0.0)时间步大小(ms): dt2ms=1/(2*ncpm)上面的运算提供速度轮廓数据点用于下面的工具运动部分。
一、关于dyna中材料失效准则的定义有些材料类型中有关于失效准则的定义,但是也有些材料类型没有失效准则的材料类型,这时需要额外的失效准则定义,与材料参数一块定义材料特性。
需要用到*mat_add_erosion关键字,对于这个关键字有几个需要注意的地方。
1、材料的通用性破坏准则:`材料通常为拉破坏或者剪切破坏,静水压是以压为正,拉为负,所以静水压破坏就是给出最小的承受压力,当然需要小于0(即拉力),如果静水压小于该值,则材料破坏。
相反,应力则是以压为负,拉为正,故最大主应力或最大等效应力或最大剪应力破坏等等都是给出最大的应力极限,当然大于0,如果拉应力大于该值,则材料破坏,无论是*MAT_ADD_EROSION,还是材料内部自带的破坏准则还是其他软件,都遵循以上准则。
注意:屈服不是失效。
2、单元失效模拟的功能与目的单元删除功能是为了克服有限元本身的缺陷而提出的一项方法,由于有限元本身是基于连续介质力学的,而在连续介质力学中,所研究的物体需要是连续的,既物质域在空间中连续。
在这样的理论假设框架下,单元本身是不会消失的。
然而在实际情况下,由于损伤断裂的存在,势必会使得一些单元消失或者完全的失效,所以为了能够模拟这种情况,DYNA 提供了单元失效功能。
破坏、失效、断裂,都是工程性的概念,它表示在达到某一准则后,结构、构件、或者构件中的某一部分,从结构中退出工作,不再影响整体结构的受力。
而从有限元概念上说,对上述机制的模拟,基本手段都是一样的,就是当满足某一指标(比如某个应变大小)后,将一个单元或者一个积分点的质量、刚度和应力、应变都设为零(或者非常接近与零),这样它在整体结构计算中就不再发挥作用,进而实现了退出工作机制的模拟。
所以,无论是把纤维模型中的某个纤维、或者分层壳模型中的某一层、或者实体模型中的某个积分点,或者结构中的某个单元,让其不再参与整体结构计算,都可以达到模拟破坏退出工作的目的。
而所谓单元生死技术,是上述基本概念在有限元程序中的一个“打包”应用。
一、关于dyna中材料失效准则的定义有些材料类型中有关于失效准则的定义,但是也有些材料类型没有失效准则的材料类型,这时需要额外的失效准则定义,与材料参数一块定义材料特性。
需要用到 *mat_add_erosion关键字,对于这个关键字有几个需要注意的地方。
1、材料的通用性破坏准则:`材料通常为拉破坏或者剪切破坏,静水压是以压为正,拉为负,所以静水压破坏就是给出最小的承受压力,当然需要小于0(即拉力),如果静水压小于该值,则材料破坏。
相反,应力则是以压为负,拉为正,故最大主应力或最大等效应力或最大剪应力破坏等等都是给出最大的应力极限,当然大于0,如果拉应力大于该值,则材料破坏,无论是 *MAT_ADD_EROSION,还是材料内部自带的破坏准则还是其他软件,都遵循以上准则。
注意:屈服不是失效。
2、单元失效模拟的功能与目的单元删除功能是为了克服有限元本身的缺陷而提出的一项方法,由于有限元本身是基于连续介质力学的,而在连续介质力学中,所研究的物体需要是连续的,既物质域在空间中连续。
在这样的理论假设框架下,单元本身是不会消失的。
然而在实际情况下,由于损伤断裂的存在,势必会使得一些单元消失或者完全的失效,所以为了能够模拟这种情况,DYNA 提供了单元失效功能。
破坏、失效、断裂,都是工程性的概念,它表示在达到某一准则后,结构、构件、或者构件中的某一部分,从结构中退出工作,不再影响整体结构的受力。
而从有限元概念上说,对上述机制的模拟,基本手段都是一样的,就是当满足某一指标(比如某个应变大小)后,将一个单元或者一个积分点的质量、刚度和应力、应变都设为零(或者非常接近与零),这样它在整体结构计算中就不再发挥作用,进而实现了退出工作机制的模拟。
所以,无论是把纤维模型中的某个纤维、或者分层壳模型中的某一层、或者实体模型中的某个积分点,或者结构中的某个单元,让其不再参与整体结构计算,都可以达到模拟破坏退出工作的目的。
而所谓单元生死技术,是上述基本概念在有限元程序中的一个“打包”应用。
关于求解控制——很多时候,在显式分析中要说明的求解控制参数与隐式分析中的控制参数非常相似。
——显式求解中要说明的基本参数:1:TIME代表实际的物理时间。
实际求解时间应该很短,通常为毫秒级。
solution : time controls>solution time2: EDINT 积分点数(对)。
壳单元需要至少3-5 个积分点,这样才能捕捉到塑性效应。
solution : output control:Integ Pt Storage …3: EDRST,EDHTIM将时间步结果写入到.rst和.his文件的个数。
.rst文件记录了整个模型的结果,可供通用后处理器使用,一般典型的输出步数为10-100个(缺省为100)。
.his 文件记录了模型的一个子组的结果,可供时间历史后处理器使用。
一般输出步数为 1 000- 1 000000(缺省为1000)――除写出.his和.rst二进制结果文件以外,还可以用EDOPT命令确定写出结果文件d3plot 和d3thdt 。
――用户还可以输出一系列包含特定信息的ASCII文件:GLSTA■全局模型数据,BNDOU边界条件力与能量,RWFOF刚性墙力,DEFOR离散单元力,MATSU材料能量,NCFOR节点界面力,RCFOR界面反作用力,DEFGE变形几何数据,SPCFORC 单点约束力,SWFOF节点约束反力(点焊),RBDOU刚体数据,GCEOU 几何接触实体,SLEOU滑移面能量,JNTFOR节点数据,ELOU■单元数据。
――使用三种高级求解控制选项:1, CPC控制:说明CPU限制。
2,质量缩放:调整单元质量,增加时间步长。
3,子循环:调整模型以减少CPU时间(不推荐)。
――通过调整每个单元的密度,质量缩放(根据单元的大小调整任何单元的密度)从而对每个单元调整合适的时间步。
――初始的时间步长与最小的单元有关,使用质量缩放初始时间步长加长,CPU计算时间减少68%,具有质量误差,质心坐标也会发生变化。
ANSYS/LSDYNA 经验手册显式与隐式方法对比:隐式时间积分不考虑惯性效应([C]and[M])。
在t+△t时计算位移和平均加速度:{u}={F}/[K]。
线性问题时,无条件稳定,可以用大的时间步。
非线性问题时,通过一系列线性逼近(Newton-Raphson)来求解;要求转置非线性刚度矩阵[k];收敛时候需要小的时间步;对于高度非线性问题无法保证收敛。
显式时间积分用中心差法在时间t求加速度:{a}=([F(ext)]-[F(int)])/[M]。
速度与位移由:{v}={v0}+{a}t,{u}={u0}+{v}t新的几何构型由初始构型加上{X}={X0}+{U}非线性问题时,块质量矩阵需要简单的转置;方程非耦合,可以直接求解;无须转置刚度矩阵,所有的非线性问题(包括接触)都包含在内力矢量中;内力计算是主要的计算部分;无效收敛检查;保存稳定状态需要小的时间步。
关于文件组织:jobname.lsdyna输入流文件,包括所有的几何,载荷和材料数据jobname.rst后处理文件主要用于图形后处理(post1),它包含在相对少的时间步处的结果。
jobname.his在post26中使用显示时间历程结果,它包含模型中部分与单元集合的结果数据。
时间历程ASCII文件,包含显式分析额外信息,在求解之前需要用户指定要输出的文件,它包括:GLSTAT全局信息,MATSUM材料能量,SPCFORC节点约束反作用力,RCFORC接触面反作用力,RBDOUT刚体数据,NODOUT节点数据,ELOUT单元数据……在显式动力分析中还可以生成下列文件:D3PLOT类似ansys中jobname.rstD3THDT时间历程文件,类似ansys中jobname.his关于单元:ANSYS/LSDYNA有7种单元(所有单元均为三维单元):LINK160:显式杆单元;BEAM161:显式梁单元;SHELL163:显式薄壳单元;SOLID164:显式块单元;COMBI165:显式弹簧与阻尼单元;MASS166:显式结构质量;LINK167:显式缆单元显式单元与隐式单元不同:每种单元可以用于几乎所有的材料模型。
总能量=内能+动能+滑移界面能+。
能量之间是可以相互转化的,但是对于动力学问题,总能量一般是不太变的。
也就是能量守恒原理。
沙漏模式也就零能模式,他在理论上是一种存在的一种变形模式,但是在实际模型中是不可能存上的。
零能模式就是指有变形,但是不消耗能量。
显然是一种伪变形模式,若不加以控制,计算模型会变得不稳定,并且计算出来的结果也是没有多大意义的。
要加抵制这种变形模式就得相应的消耗一定的能量,也就是沙漏能,如果这个比值太多,就说明模型和实际的变形有很大的差别,当然是不正确的。
这也是缩减积分所付出的代价。
用全积分单元可以解决这个问题,但是效率不高,有可能导致体积锁死,过刚的一些问题。
1. 沙漏的定义沙漏hourglassing一般出现在采用缩减积分单元的情况下:比如一阶四边形缩减积分单元,该单元有四个节点“o”,但只有一个积分点“*”。
而且该积分点位于单元中心位置,此时如果单元受弯或者受剪,则必然会发生变形,如下图a所示。
但是,现实的情况却是在这三种情况下,单元积分点上的主应力和剪应力状况都没有发生变化,也就是说该单元可以自由地在这三种形态之间转变而无需外力。
很小的扰动理论上可以让单元无限地变形下去,而不会消耗任何能量,这就是所谓的沙漏的零能量模式。
这时就要对沙漏进行控制,比如人为地给单元加上一定的刚度。
沙漏只影响实体和四边形单元,而四面体单元、三角形壳单元、梁单元没有沙漏模式,但四面体单元、三角形壳单元缺点是在许多应用中被认为过于刚硬。
沙漏的影响范围:当显式动态分析使用缩减积分单元时,应判断沙漏是否会显著的影响结果。
一般准则是,沙漏能量不能超过内能的10%。
沙漏影响的查看、判断:沙漏能量和内能的对比可在ASCⅡ文件GLSTAT和MATSDM中看出(这两个需要在前处理时设置,或在K文件中设置:在*control_energy卡片中设置HGEN=2,而且用*database_glstat和*database_matsum卡分别输出系统和每一个部件的沙漏能),也可在POST20中画出。
沙漏控制的整理1.沙漏的定义沙漏hourglassing⼀般出现在采⽤缩减积分单元的情况下:⽐如⼀阶四边形缩减积分单元,该单元有四个节点“0”,但只有⼀个积分点“*”。
⽽且该积分点位于单元中⼼位置,此时如果单元受弯或者受剪,则必然会发⽣变形,如下图a所⽰。
但是,现实的情况却是在这三种情况下,单元积分点上的主应⼒和剪应⼒状况都没有发⽣变化,也就是说该单元可以⾃由地在这三种形态之间转变⽽⽆需外⼒。
很⼩的扰动理论上可以让单元⽆限地变形下去,⽽不会消耗任何能量,这就是所谓的沙漏的零能量模式。
这时就要对沙漏进⾏控制,⽐如⼈为地给单元加上⼀定的刚度。
沙漏的影响范围:沙漏只影响实体和四边形单元以及⼆维单元,⽽四⾯体单元、三⾓形壳单元、梁单元没有沙漏模式,但四⾯体单元、三⾓形壳单元缺点是在许多应⽤中被认为过于刚硬。
沙漏影响的查看、判断:当显式动态分析使⽤缩减积分单元时,应判断沙漏是否会显著的影响结果。
⼀般准则是,沙漏能量不能超过内能的10%。
沙漏能量和内能的对⽐可在ASCⅡ⽂件GLSTAT和MATSDM中看出(这两个需要在前处理时设置,或在K⽂件中设置:在*control_energy卡⽚中设置HGEN=2,⽽且⽤*database_glstat和*database_matsum卡分别输出系统和每⼀个部件的沙漏能),也可在POST20中画出。
为确保这些⽂件中记录沙漏能量结果,注意EDENERGY 中的HGEN应设为1。
对于壳单元,可以绘制出沙漏能密度云图,但事先在*database_extent_binary 卡中设置SHGE=2。
然后在LS-Prepost中选择Fcomp>Misc>hourglass energy。
2.在LS-DYNA⾥的沙漏控制⽅法1)细化模型⽹格:好的建模可以防⽌产⽣过度沙漏,基本原则是使⽤均匀⽹格。
(⼀般来说,整体⽹格细化会明显地减少沙漏的影响。
)2)避免在单点上集中加载:由于激活的单元把沙漏模式传递给相邻单元,所以点加载应扩展到⼏个相邻节点组成的⼀个⾯上,施加压⼒载荷优于在单点上加载。