第六章伺服系统
- 格式:ppt
- 大小:754.50 KB
- 文档页数:55
伺服系统培训课程设计一、课程目标知识目标:1. 学生能理解伺服系统的基本概念,掌握其工作原理和组成结构。
2. 学生能掌握伺服系统中关键参数的计算方法,如转速、扭矩、精度等。
3. 学生了解不同类型伺服系统的特点及其适用场合。
技能目标:1. 学生能运用所学知识分析和解决实际伺服系统应用中的问题。
2. 学生具备设计简单伺服系统的能力,能根据需求选择合适的组件并进行调试。
3. 学生能熟练使用相关工具和设备进行伺服系统的安装、调试和维护。
情感态度价值观目标:1. 培养学生关注工程技术发展的意识,激发对伺服系统及其应用的兴趣。
2. 培养学生严谨、细致、负责的工作态度,增强团队协作和沟通能力。
3. 培养学生具备安全意识,遵循相关操作规程,确保伺服系统应用的安全可靠。
本课程针对高年级学生,结合学科特点,注重理论与实践相结合,以实际应用为导向。
课程目标旨在使学生掌握伺服系统的基础知识,具备实际操作和问题解决能力,同时培养良好的职业素养和安全意识。
通过课程学习,为学生未来在自动化、机器人等相关领域的发展奠定基础。
二、教学内容1. 伺服系统概述:介绍伺服系统的基本概念、发展历程、应用领域及发展趋势。
- 教材章节:第一章 伺服系统概述- 内容列举:伺服系统的定义、分类、工作原理。
2. 伺服系统组成与原理:分析伺服系统的组成结构,讲解各部分功能及相互关系。
- 教材章节:第二章 伺服系统的组成与原理- 内容列举:驱动器、执行器、反馈元件、控制器等组成部分及其工作原理。
3. 伺服系统关键参数计算:学习伺服系统中转速、扭矩、精度等关键参数的计算方法。
- 教材章节:第三章 伺服系统关键参数计算- 内容列举:转速与扭矩的计算、精度分析、系统稳定性分析。
4. 伺服系统类型及特点:介绍不同类型伺服系统的特点、优缺点及适用场合。
- 教材章节:第四章 伺服系统类型及特点- 内容列举:步进伺服系统、交流伺服系统、直流伺服系统等。
5. 伺服系统应用与案例分析:分析伺服系统在实际应用中的案例,提高学生的问题解决能力。

伺服系统课件伺服系统课件伺服系统是一种广泛应用于各种机械设备中的控制系统,它具有高精度、高可靠性和高响应速度等特点。
在现代工业中,伺服系统被广泛应用于机床、机器人、自动化生产线等领域。
为了更好地理解和掌握伺服系统的原理和应用,许多学校和培训机构都开设了相关的课程,并提供相应的课件。
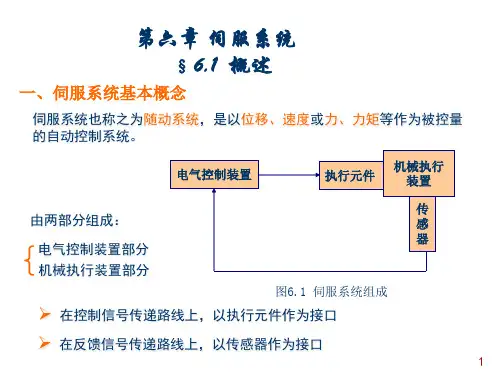
一、伺服系统的基本原理伺服系统的基本原理是通过对输出信号和反馈信号进行比较,控制执行机构的运动,使其达到预定的位置、速度或力矩。
伺服系统通常由控制器、执行机构和反馈装置组成。
控制器负责接收输入信号,并根据反馈信号进行控制算法的计算,然后输出控制信号给执行机构。
执行机构根据控制信号的变化来调整自身的运动状态。
反馈装置负责采集执行机构的运动信息,并将其反馈给控制器,以便控制器进行调整。
二、伺服系统的应用领域伺服系统在各个领域都有广泛的应用。
在机床领域,伺服系统可以实现高精度的切削加工,提高加工质量和效率。
在机器人领域,伺服系统可以实现机器人的精确定位和运动控制,使机器人能够完成各种复杂的任务。
在自动化生产线领域,伺服系统可以实现产品的高速运输和精确定位,提高生产效率和质量。
三、伺服系统的优势和挑战伺服系统相比于传统的开环控制系统具有许多优势。
首先,伺服系统具有高精度和高可靠性,可以实现对输出位置、速度和力矩的精确控制。
其次,伺服系统具有高响应速度,可以快速调整执行机构的运动状态,适应快速变化的工作环境。
此外,伺服系统还具有较低的能耗和噪音,能够提供更加舒适和安静的工作环境。
然而,伺服系统也面临一些挑战。
首先,伺服系统的设计和调试较为复杂,需要专业的知识和技能。
其次,伺服系统的成本较高,对于一些小型企业和个人来说,可能难以承受。
此外,伺服系统对环境的要求较高,对温度、湿度和电磁干扰等因素都有一定的限制。
四、伺服系统课件的设计和应用为了帮助学生更好地理解和掌握伺服系统的原理和应用,许多学校和培训机构都开设了相关的课程,并提供相应的课件。
自动控制原理伺服系统知识点总结自动控制原理中的伺服系统是一种常见而重要的控制系统,广泛应用于工业控制、机械运动控制以及航空航天等领域。
本文将对伺服系统的基本概念、结构和运作原理进行总结,希望能够帮助读者对伺服系统有更加清晰的了解。
一、基本概念伺服系统是一种能够接受输入信号并对其进行控制输出的系统。
它由控制器、执行机构和反馈装置组成。
其中,控制器用于根据输入信号生成控制指令,执行机构负责根据控制指令产生运动,而反馈装置则用于获取系统的输出信息,并将其与输入信号进行比较,实现闭环控制。
二、结构伺服系统的基本结构包括传感器、控制器、执行器和负载。
传感器用于测量系统的输出变量,并将其转化为电信号。
控制器接收传感器的信号,经过运算后生成控制信号,并将其送往执行器。
执行器根据控制信号产生相应的输出力或扭矩,作用于负载上,使其发生所需的运动。
三、运作原理伺服系统的运作原理涉及到反馈控制和误差校正两个方面。
当输入信号经过控制器处理后,由执行器产生的输出会引起系统输出变量的变化。
此时,反馈装置会将实际输出信息与期望输出进行比较,并计算出误差信号。
控制器根据误差信号进行调整,通过对执行机构施加合适的控制力或扭矩,使得系统输出逐渐趋近于期望输出。
这个过程是一个不断校正误差的闭环反馈控制过程。
四、常见的伺服系统类型1. 位置伺服系统:通过控制执行机构的位置来实现对负载位置的控制,常见的应用包括数控机床和机械臂等。
2. 速度伺服系统:通过控制执行机构的速度来实现对负载速度的控制,常见的应用包括汽车巡航控制和搬运机械等。
3. 力/扭矩伺服系统:通过控制执行机构施加的力或扭矩来实现对负载的控制,常见的应用包括机器人抓取和飞行器控制等。
五、伺服系统的性能指标伺服系统的性能指标通常包括稳定性、精度和动态响应速度等。
稳定性指系统在受到外部扰动时,是否能够快速恢复到期望状态。
精度指系统输出与期望输出之间的偏差大小。
动态响应速度指系统输出达到稳定状态所需要的时间。