第六章_伺服系统检测元件概论
- 格式:ppt
- 大小:3.64 MB
- 文档页数:80


第5章 位置检测装置习题及答案1.伺服系统中常用的位置检测装置有几种?各有什么特点?答:伺服系统中常用的位置检测装置有:旋转变压器、感应同步器、脉冲编码器和光栅,各检测装置的特点如下:旋转变压器:又称同步分解器,是利用电磁感应原理的一种模拟式测角器件,是一种旋转式的小型交流电动机,在结构上和二相绕线式异步电动机相似,由定子和转子组成,分有刷和无刷两种。
其特点是坚固、耐热、耐冲击、抗干扰、成本低,是数控系统中较为常用的位置传感器;感应同步器:感应同步器是从旋转变压器发展而来的直线式感应器,相当于一个展开的多级旋转变压器。
踏实利用滑尺上的励磁绕组和定尺上的感应绕组之间相对位置的变化而产生电磁耦合的变化,从而发出相应的位置信号来实现位移检测的,其特点为:精度高,工作可靠,抗干扰能力强,维修简单、寿命长,测量距离长,工艺好、成本低、便于成批生产;脉冲编码器:脉冲编码器分为光电式、接触式和电磁感应式三种。
数控机床主要使用光电式脉冲编码器。
光电式脉冲编码器按编码方式又分为绝对值式和增量式两种,常用的为增量式脉冲编码器,其优点是结构简单、成本低、使用方便,缺点是有可能由于噪声或其它外界的干扰产生计数误差,若因停电、刀具破损而停机,事故排除后不能再找到事故发生前执行部件的正确位置;光栅:在高精度数控机床和数显系统中,常使用光栅作为位置检测装置。
它是将机械位移或模拟量转变为数字脉冲,反馈给CNC或数显装置来实现闭环控制的。
计量光栅分为圆光栅和长光栅两种。
圆光栅用于测量转角位移,长光栅用于测量直线位移,由于激光技术的发展,光栅制作的精度有了很大的提高,现在光栅精度可以达到微米级甚至亚微米级。
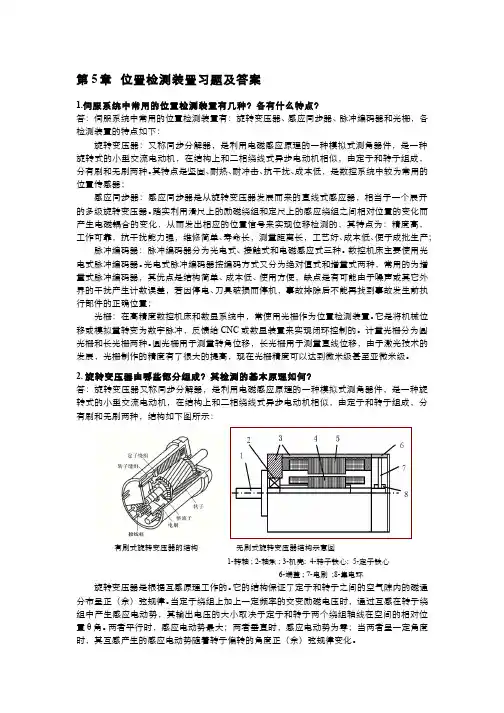
2. 旋转变压器由哪些部分组成?其检测的基本原理如何?答:旋转变压器又称同步分解器,是利用电磁感应原理的一种模拟式测角器件,是一种旋转式的小型交流电动机,在结构上和二相绕线式异步电动机相似,由定子和转子组成,分有刷和无刷两种,结构如下图所示:有刷式旋转变压器的结构无刷式旋转变压器结构示意图1-转轴 ; 2-轴承 ; 3-机壳; 4-转子铁心; 5-定子铁心6-端盖 ; 7-电刷 ;8-集电环旋转变压器是根据互感原理工作的。
伺服控制系统- 概述第六章伺服控制系统第一节概述伺服控制系统是一种能够跟踪输入的指令信号进行动作,从而获得精确的位置、速度及动力输出的自动控制系统。
如防空雷达控制就是一个典型的伺服控制过程,它是以空中的目标为输入指令要求,雷达天线要一直跟踪目标,为地面炮台提供目标方位;加工中心的机械制造过程也是伺服控制过程,位移传感器不断地将刀具进给的位移传送给计算机,通过与加工位置目标比较,计算机输出继续加工或停止加工的控制信号。
绝大部分机电一体化系统都具有伺服功能,机电一体化系统中的伺服控制是为执行机构按设计要求实现运动而提供控制和动力的重要环节。
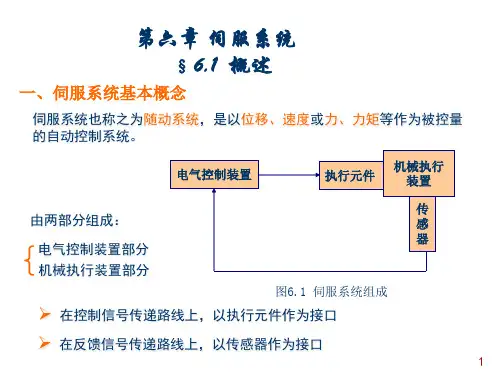
一、伺服系统的结构组成机电一体化的伺服控制系统的结构、类型繁多,但从自动控制理论的角度来分析,伺服控制系统一般包括控制器、被控对象、执行环节、检测环节、比较环节等五部分。
如图6-1给出了系统组成原理框图。
1、比较环节是将输入的指令信号与系统的反馈信号进行比较,以获得输出与输入间的偏差信号的环节,通常由专门的电路或计算机来实现。
2、控制器通常是计算机或PID控制电图6-1伺服系统组成原理框图路,主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。
3、执行元件作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被控对象工作。
机电一体化系统中的执行元件一般指各种电机或液压、气动伺服机构等。
4、被控对象是指被控制的机构或装置,是直接完成系统目的的主体。
一般包括传动系统、执行装置和负载。
5、检测环节是指能够对输出进行测量,并转换成比较环节所需要的量纲的装置。
一般包括传感器和转换电路。
在实际的伺服控制系统中,上述的每个环节在硬件特征上并不独立,可能几个环节在一个硬件中,如测速直流电机即是执行元件又是检测元件。
二、伺服系统的分类伺服系统的分类方法很多,常见的分类方法有:1、按被控量参数特性分类按被控量不同,机电一体化系统可分为位移、速度、力矩等各种伺服系统。
伺服系统组成、概述与控制原理(难得好⽂)伺服系统既可以是开环控制⽅式,也可以是闭环控制⽅式。
⼀、伺服系统简述伺服系统(servomechanism)指经由闭环控制⽅式达到对⼀个机械系统的位置、速度和加速度的控制。
⼀个伺服系统的构成包括被控对象、执⾏器和控制器(负载、伺服电动机和功率放⼤器、控制器和反馈装置)。
1. 执⾏器的功能在于提供被控对象的动⼒,其构成主要包括伺服电动机和功率放⼤器,伺服电动机包括反馈装置如光电编码器、旋转编码器或光栅等(位置传感器)。
2. 控制器的功能在于提供整个伺服系统的闭环控制如转矩控制、速度控制、位置控制等,伺服驱动器通常包括控制器和功率放⼤器。
3. 反馈装置除了位置传感器,可能还需要电压、电流和速度传感器。
下图为⼀般⼯业⽤伺服系统的组成框图,其中红⾊为伺服驱动器组成部分,黄⾊为伺服电机组成部分。
“伺服”——词源于希腊语“奴⾪”的意思。
⼈们想把“伺服机构”当成⼀个得⼼应⼿的驯服⼯具,服从控制信号的要求⽽动作:在讯号来到之前,转⼦静⽌不动;讯号来到之后,转⼦⽴即转动;当讯号消失,转⼦能即时⾃⾏停转。
由于它的“伺服”性能,因此⽽得名——伺服系统。
⼆、常⽤参数1、伺服电机铭牌参数1. 法兰尺⼨2. 电机极对数3. 电机额定输出功率4. 电源电压规格:单相/三相5. 电机惯量:分为⼤、中、⼩惯量,指的是转⼦本⾝的惯量,从响应⾓度来讲,电机的转⼦惯量应⼩为好;从负载⾓度来看,电机的转⾃惯量越⼤越好6. 电机出轴类型:键槽、扁平轴、光轴、减速机适配…7. 电机动⼒线定义:U: RED V:BLACK W: WHITE8. 额定转速9. 编码器线数:2500/1250/1000/17B/20B法兰是轴与轴之间相互连接的零件,⽤于管端之间的连接。
2、伺服驱动器铭牌参数1. 额定输出功率2. 电源电压规格3. 编码器线数3、伺服系统的性能指标1. 检测误差:包括给定位置传感器和反馈位置传感器的误差,传感器本⾝固有,⽆法克服;2. 系统误差:系统类型决定了系统误差。