第二章应力状态 弹塑性力学基本理论及应用_刘土光
- 格式:doc
- 大小:1.49 MB
- 文档页数:21
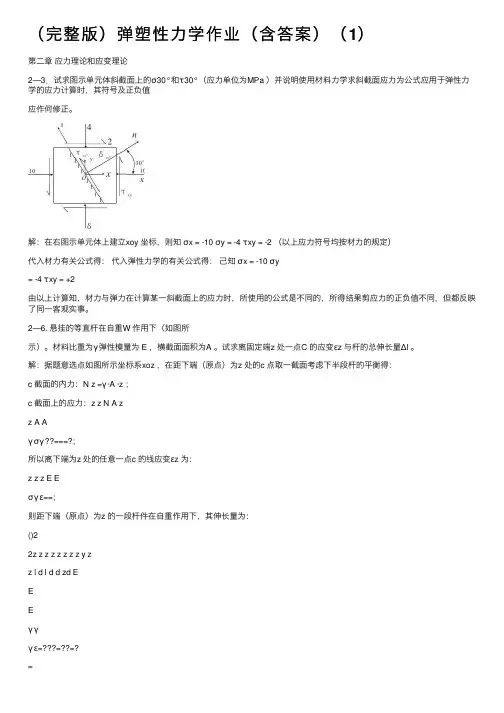
(完整版)弹塑性⼒学作业(含答案)(1)第⼆章应⼒理论和应变理论2—3.试求图⽰单元体斜截⾯上的σ30°和τ30°(应⼒单位为MPa )并说明使⽤材料⼒学求斜截⾯应⼒为公式应⽤于弹性⼒学的应⼒计算时,其符号及正负值应作何修正。
解:在右图⽰单元体上建⽴xoy 坐标,则知σx = -10 σy = -4 τxy = -2 (以上应⼒符号均按材⼒的规定)代⼊材⼒有关公式得:代⼊弹性⼒学的有关公式得:⼰知σx = -10 σy= -4 τxy = +2由以上计算知,材⼒与弹⼒在计算某⼀斜截⾯上的应⼒时,所使⽤的公式是不同的,所得结果剪应⼒的正负值不同,但都反映了同⼀客观实事。
2—6. 悬挂的等直杆在⾃重W 作⽤下(如图所⽰)。
材料⽐重为γ弹性模量为 E ,横截⾯⾯积为A 。
试求离固定端z 处⼀点C 的应变εz 与杆的总伸长量Δl 。
解:据题意选点如图所⽰坐标系xoz ,在距下端(原点)为z 处的c 点取⼀截⾯考虑下半段杆的平衡得:c 截⾯的内⼒:N z =γ·A ·z ;c 截⾯上的应⼒:z z N A zz A Aγσγ??===?;所以离下端为z 处的任意⼀点c 的线应变εz 为:z z z E Eσγε==;则距下端(原点)为z 的⼀段杆件在⾃重作⽤下,其伸长量为:()22z z z z z z z z y zz l d l d d zd EEEγγγε==??=?=ooooV ;显然该杆件的总的伸长量为(也即下端⾯的位移):()2222ll A l lW ll d l EEAEAγγ=??===oV ;(W=γAl ) 2—9.⼰知物体内⼀点的应⼒张量为:σij =50030080030003008003001100-?? +---应⼒单位为kg /cm 2 。
试确定外法线为n i(也即三个⽅向余弦都相等)的微分斜截⾯上的总应⼒n P v、正应⼒σn 及剪应⼒τn 。

弹塑性力学基础理论与应用弹塑性力学是力学中一个重要的分支,涵盖了弹性力学和塑性力学的基本原理和应用。
本文将简要介绍弹塑性力学的基础理论和一些应用领域。
一、弹塑性力学的基础理论1. 弹性力学理论弹性力学研究材料在外力作用下的弹性变形及其恢复过程。
根据胡克定律,应力与应变成正比。
弹性力学理论通过应力张量与应变张量之间的关系描述了弹性材料的力学行为。
弹性模量是弹性力学的重要参数,表征了材料的刚度。
2. 塑性力学理论塑性力学研究材料在超过弹性极限后的变形行为。
当外力超过材料的弹性极限时,材料会发生塑性变形,而不是立即恢复到原来的形状。
塑性力学理论包括弹塑性本构方程的建立和塑性流动规律的描述。
3. 弹塑性力学理论弹塑性力学是弹性力学和塑性力学的综合应用。
它考虑了材料在弹性和塑性行为之间的转换。
在某些情况下,材料可以同时表现出弹性和塑性特性。
弹塑性力学理论利用不同的本构关系来描述材料在变形过程中的不同阶段。
二、弹塑性力学的应用1. 材料工程弹塑性力学在材料工程领域中具有重要的应用价值。
通过研究材料的弹性行为和塑性行为,可以确定材料的强度、韧性和耐久性,从而指导材料的选用和设计。
在材料的加工过程中,弹塑性力学理论也可以用于模拟和预测材料的变形行为。
2. 结构工程在结构设计和分析中,弹塑性力学也发挥着重要作用。
结构的承载能力和变形行为与材料的弹性和塑性特性密切相关。
通过考虑弹塑性行为,可以更准确地评估结构的安全性和稳定性。
3. 土木工程土木工程中的地基和土壤材料往往存在复杂的弹塑性特性。
弹塑性力学可用于分析土壤的沉降和变形行为,以及地基的稳定性。
在岩土工程中,弹塑性力学理论也可以用于分析岩土体的稳定性和变形行为。
4. 金属加工金属的塑性变形是金属加工过程中的核心问题。
弹塑性力学理论可以用于研究金属的屈服和流动行为,从而指导金属的模具设计和加工工艺的优化。
总结:弹塑性力学是力学中的一个重要分支,它综合了弹性力学和塑性力学的基础理论与应用。

塑性力学基础理论与应用塑性力学是材料力学中的重要分支,研究材料的塑性变形行为以及力与位移之间的关系。
在工程领域中,塑性力学的应用范围广泛,包括金属加工、结构设计和材料强度评估等。
本文将介绍塑性力学的基础理论,并探讨其在实际应用中的重要性。
一、基础理论1. 应力与应变在塑性力学中,应力是指材料内部的力与单位面积之比,常用符号为σ。
应力可分为正应力和剪应力,分别表示作用于垂直于某一平面上的力和作用于平行于某一平面上的力。
应变则表示材料在受力作用下发生的形变量,常用符号为ε。
同样,应变可分为正应变和剪应变,分别表示与正应力和剪应力相对应的形变。
2. 弹性与塑性材料的塑性变形是指在受力作用下,材料发生不可逆的形变。
与之相对的是弹性变形,即当受力作用停止后,材料能够完全恢复其原始形状。
塑性变形是材料的一种本质特性,与材料的晶体结构、力学性质等密切相关。
3. 流变行为材料的流变行为是指在受力作用下,材料的应力与应变之间的关系。
根据应力-应变曲线的特征,可以将材料的流变行为分为弹性、塑性和高温阶段。
特别地,在材料的塑性阶段,常采用屈服准则来描述材料的流变行为,例如屈服应力的大小和塑性应变的发展过程。
二、应用1. 金属加工塑性力学在金属加工过程中发挥着重要作用。
例如在锻造过程中,通过施加压力使金属材料发生塑性变形,从而得到所需的形状。
塑性力学的理论模型可以帮助工程师预测和控制金属的变形行为,以提高加工效率和产品质量。
2. 结构设计在工程结构设计中,塑性力学的理论可以用于评估结构的安全性和承载能力。
通过分析结构在外部载荷作用下的塑性变形,可以确定结构的破坏机制和结构的极限承载能力。
这对于工程师来说是至关重要的,以确保结构在使用过程中的可靠性和安全性。
3. 材料强度评估塑性力学的理论也可用于材料的强度评估。
通过研究材料的屈服行为和塑性变形过程,可以推断材料的强度和耐久性。
这对于选择材料和确定合适的工作条件非常重要,以满足特定工程应用的要求。
第五章 弹塑性力学问题的建立与求解弹塑性力学问题在数学上属边值问题,就是在给定边界条件下,确定物体内的应力场和应变场,而应变场与位移场密切相关。
所求得应力场、应变场和位移场应该满足相应的基本方程和边界条件。
本章内容,除介绍弹性及弹塑性力学边值问题的建立之外,还将简单阐述弹塑性问题的解法。
5.1弹塑性力学边值问题1.1弹塑力学的基本方程弹塑性力学边值问题就是在给定载荷下确定物体内的应力场、应变场和位移场,它们应满足基本方程及给定的边界条件。
而所谓“载荷”包括:体积力、面积力(即应力边界条件)及给定的边界位移(即位移边界条件)。
由于在部分边界上给定的位移也是对物体的一种外部干扰,可归于广义的载荷。
在笛卡儿坐标系下,弹塑性力学的基本方程为:1).平衡方程⎪⎪⎪⎭⎪⎪⎪⎬⎫=+∂∂+∂∂+∂∂=+∂∂+∂∂+∂∂=+∂∂+∂∂+∂∂000Z z y x Y z y x X z y x z zy zx yz y yx xzxy x στττστττσ (5.1-1a)或用张量写为),,,(0,z y x j i F i j ij ==+σ (5.1-1b)对于弹塑性力学问题,在小变形条件下,其平衡方程还可用率型式表示为0,)(=+∙∙i j ij F σ (5.1-1c) 2).几何方程对于小变形,几何方程包括Cauchy 应变张量⎪⎪⎪⎭⎪⎪⎪⎬⎫∂∂+∂∂=∂∂=∂∂+∂∂=∂∂=∂∂+∂∂=∂∂=x w z u zw z v y w y vy u x v x u zxz yz y xy x γεγεγε,,, (5.1-2a) 或),,,(2/)(,,z y x j i u u i j j i ij =+=ε (5.1-2b)和由应变位移关系导出的应变协调方程⎪⎪⎪⎪⎪⎪⎪⎪⎭⎪⎪⎪⎪⎪⎪⎪⎪⎬⎫∂∂∂=∂∂-∂∂+∂∂∂∂∂∂∂=∂∂-∂∂+∂∂∂∂∂∂∂=∂∂-∂∂+∂∂∂∂∂∂∂=∂∂+∂∂∂∂∂=∂∂+∂∂∂∂∂=∂∂+∂∂y x z y x z z x y x z y z y x z y x x z z x z y yz y x x y z xyzx yz y zxyz xy x yzxy zx zxx z yzz y xyy x εγγγεγγγεγγγγεεγεεγεε2222222222222222222)(2)(2)( (5.1-3a) 当物体内某应力点进入塑性状态,其几何方程通常采用应变率表示为⎪⎪⎪⎪⎪⎭⎪⎪⎪⎪⎪⎬⎫∂∂+∂∂=∂∂=∂∂+∂∂=∂∂=∂∂+∂∂=∂∂=∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙x w z u zw z v y w y v y u x v tu zx z yz y xy x γεγεγε (5.1-3b)3).本构方程物体受力后,其应力状态可能一部分处于弹性阶段,一部分可能处于塑性阶段。
弹塑性力学基本理论及应用刘士光著华中科技大学第一章绪论1.1弹塑性力学的任务固体力学是研究固体材料及其构成的物体结构在外部干扰(载荷、温度交化等)下的力学响应的科学,按其研究对象区分为不同的学科分支。
弹性力学和塑性力学是固体力学的两个重要分支。
弹性力学是研究固体材料及由其构成的物体结构在弹性变形阶段的力学行为,包括在外部干扰下弹性物体的内力(应力)、变形(应变)和位移的分布,以及与之相关的原理、理论和方法;塑性力学则研究它们在塑性变形阶段的力学响应。
大多数材料都同时具有弹性和塑性性质,当外载较小时,材料呈现为弹性的或基本上是弹性的;当载荷渐增时,材料将进入塑性变形阶段,即材料的行为呈现为塑性的。
所谓弹性和塑性,只是材料力学性质的流变学分类法中两个典型性质或理想模型;同一种材料在不同条件下可以主要表现为弹性的或塑性的。
因此,所谓弹性材料或弹性物体是指在—定条件下主要呈现弹性性态的材料或物体。
塑性材料或塑性物体的含义与此相类。
如上所述。
大多数材料往往都同时具有弹性和塑性性质,特别是在塑性变形阶段,变形中既有可恢复的弹性变形,又有不可恢复的塑性变形,因此有时又称为弹塑性材料。
本书主要介绍分析弹塑性材料和结构在外部干扰下力学响应的基本原理、理论和方法。
以及相应的“破坏”准则或失效准则。
以弹性分析为基础的结构设计是假定材料为理想弹性,相应于这种设计观点就以分析结果的实际适用范作为设计的失效准则,即认为应力(严柞地说是应力的某一函数值)到达一定限值(弹性界限),将进入塑性变形阶段时、材料将破坏。
结构中如果有一处或—部分材料“破坏”,则认为结构失效(丧失设计所规定的效用)。
由于一般的结构都处于非均匀受力状态,当高应力点或高应力区的材料到达弹性界限时,类他的大部分材料仍处于弹性界限之内;而实际材料在应力超过弹性界限以后并不实际发生破坏,仍具有一定的继续承受应力(载荷)的能力,只不过刚度相对地降低。
因此弹性设计方法不能充分发挥材料的潜力,导致材料的某种浪费。
弹塑性力学基本理论及应用-刘士光著第一章绪论1.1弹塑性力学的任务固体力学是研究固体材料及其构成的物体结构在外部干扰(载荷、温度交化等)下的力学响应的科学,按其研究对象区分为不同的学科分支。
弹性力学和塑性力学是固体力学的两个重要分支。
弹性力学是研究固体材料及由其构成的物体结构在弹性变形阶段的力学行为,包括在外部干扰下弹性物体的内力(应力)、变形(应变)和位移的分布,以及与之相关的原理、理论和方法;塑性力学则研究它们在塑性变形阶段的力学响应。
大多数材料都同时具有弹性和塑性性质,当外载较小时,材料呈现为弹性的或基本上是弹性的;当载荷渐增时,材料将进入塑性变形阶段,即材料的行为呈现为塑性的。
所谓弹性和塑性,只是材料力学性质的流变学分类法中两个典型性质或理想模型;同一种材料在不同条件下可以主要表现为弹性的或塑性的。
因此,所谓弹性材料或弹性物体是指在—定条件下主要呈现弹性性态的材料或物体。
塑性材料或塑性物体的含义与此相类。
如上所述。
大多数材料往往都同时具有弹性和塑性性质,特别是在塑性变形阶段,变形中既有可恢复的弹性变形,又有不可恢复的塑性变形,因此有时又称为弹塑性材料。
本书主要介绍分析弹塑性材料和结构在外部干扰下力学响应的基本原理、理论和方法。
以及相应的“破坏”准则或失效准则。
以弹性分析为基础的结构设计是假定材料为理想弹性,相应于这种设计观点就以分析结果的实际适用范作为设计的失效准则,即认为应力(严柞地说是应力的某一函数值)到达一定限值(弹性界限),将进入塑性变形阶段时、材料将破坏。
结构中如果有一处或—部分材料“破坏”,则认为结构失效(丧失设计所规定的效用)。
由于一般的结构都处于非均匀受力状态,当高应力点或高应力区的材料到达弹性界限时,类他的大部分材料仍处于弹性界限之内;而实际材料在应力超过弹性界限以后并不实际发生破坏,仍具有一定的继续承受应力(载荷)的能力,只不过刚度相对地降低。
因此弹性设计方法不能充分发挥材料的潜力,导致材料的某种浪费。
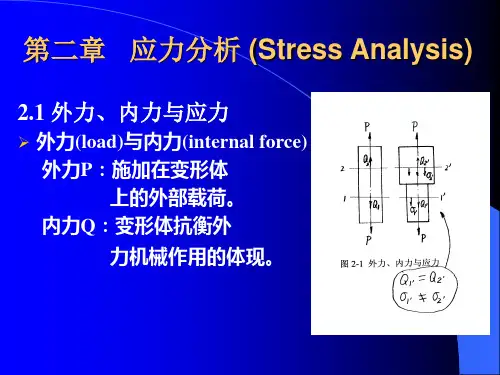
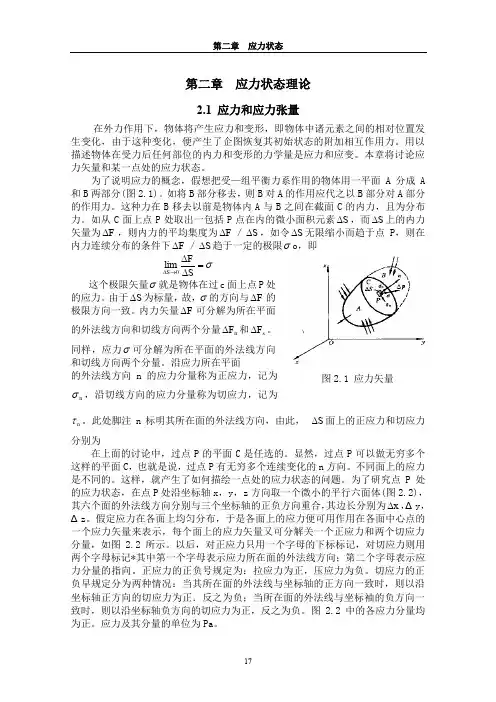
第二章 应力状态理论2.1 应力和应力张量在外力作用下,物体将产生应力和变形,即物体中诸元素之间的相对位置发生变化,由于这种变化,便产生了企图恢复其初始状态的附加相互作用力。
用以描述物体在受力后任何部位的内力和变形的力学量是应力和应变。
本章将讨论应力矢量和某一点处的应力状态。
为了说明应力的概念,假想把受—组平衡力系作用的物体用一平面A 分成A 和B 两部分(图2.1)。
如将B 部分移去,则B 对A 的作用应代之以B 部分对A 部分的作用力。
这种力在B 移去以前是物体内A 与B 之间在截面C 的内力,且为分布力。
如从C 面上点P 处取出一包括P 点在内的微小面积元素S ∆,而S ∆上的内力矢量为F ∆,则内力的平均集度为F ∆/S ∆,如令S ∆无限缩小而趋于点P ,则在内力连续分布的条件下F ∆/S ∆趋于一定的极限σ,即 σ=∆∆→∆SF S 0lim 这个极限矢量σ就是物体在过c 面上点P 处的应力。
由于S ∆为标量,故,σ的方向与F ∆的极限方向一致。
内力矢量F ∆可分解为所在平面的外法线方向和切线方向两个分量n F ∆和s F ∆。
同样,应力σ可分解为所在平面的外法线方向和切线方向两个分量。
沿应力所在平面的外法线方向n 的应力分量称为正应力,记为n σ,沿切线方向的应力分量称为切应力,记为n τ。
此处脚注n 标明其所在面的外法线方向,由此, S ∆面上的正应力和切应力分别为n σ和n τ。
在上面的讨论中,过点P 的平面C 是任选的。
显然,过点P 可以做无穷多个这样的平面C ,也就是说,过点P 有无穷多个连续变化的n 方向。
不同面上的应力是不同的。
这样,就产生了如何描绘一点处的应力状态的问题。
为了研究点P 处的应力状态,在点P 处沿坐标轴x ,y ,z 方向取一个微小的平行六面体(图2.2),其六个面的外法线方向分别与三个坐标轴的正负方向重合,其边长分别为x ∆,Δy ,Δz 。
假定应力在各面上均匀分布,于是各面上的应力便可用作用在各面中心点的一个应力矢量来表示,每个面上的应力矢量又可分解关一个正应力和两个切应力分量,如图2.2所示。
以后,对正应力只用一个字母的下标标记,对切应力则用两个字母标记*其中第一个字母表示应力所在面的外法线方向;第二个字母表示应力分量的指向。
正应力的正负号规定为:拉应力为正,压应力为负。
切应力的正负号规定分为两种情况:当其所在面的外法线与坐标轴的正方向一致时,则以沿坐标轴正方向的切应力为正,反之为负;当所在面的外法线与坐标袖的负方向一致时,则以沿坐标轴负方向的切应力为正,反之为负。
图2.2中的各应力分量均 图2.1 应力矢量为正。
应力及其分量的单位为Pa 。
图2.2 应力表示法由图2.2可知,当微小的平行六面体趋于无穷小时,六面体上的应力就代表一点处的应力。
因此,一点处的应力分量共有9个,其中有3个正应力分量、6个切应力分量,由切应力互等定理可知,实际上独立的切应力分量只有3个。
把这9个应力分量按一定规则排列,令其中每一行为过一点的一个面上的3个应力分量,即得如下应力张量,在数学上称之为二阶张量。
⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=z zy zx yz y yx xz xy x ij στττστττσσ其中 i ,j =(x ,y ,z ),当i ,j 任取x ,y ,z 时,则得到相应的应力分量,但xx σ,yy σ,zz σ分别简写为x σ,y σ,z σ。
应当指出,物体内各点的应力状态,一般并不是相同的,即非均匀分布的,因此各点的应力分量是坐标z ,y ,z 的函数。
所以,应力张量ij σ与给定点的空间位置有关,同时应力张量是针对物体中的某一确定点而言的,今后将会看到,应力张量完全确定了一点处的应力状态。
张量符号与下标记号法使冗长的弹塑性力学公式变得简明醒目,在文献中已被广泛应用,今后将逐渐熟悉这种标记法。
2.2 二维应力状态与平面问题的平衡微分方程式上节中讨论应力概念时,是从三维受力物体出发的,其中点P 是从一个三维空间中取出来的点。
为简单起见,首先讨论平面问题。
掌握了平面问题以后.再讨论空间问题就比较容易了。
当受载物体所受的面力和体力以及其应力都与某—个坐标轴(例如z 轴)无关。
平面问题又分为平面应力问题与平面应变问题。
1. 平面应力问题如果考虑如图2.3所示物体是一个很薄的平板,荷载只作用在板边,且平行于板面,即xy 平面,z 方向的体力分量Z 及面力分量z F 均为零,则板面上(2/δ±=z 处)应力分量为 0)(2=±=δσz z 0)()(22==±=±=δδττz zy z zx因板的厚度很小,外荷载又沿厚度均匀分布,所以可以近似地认为应力沿厚度均匀分布。
由此,在垂直于z 轴的任一微小面积上均有0=z σ, 0==zy zx ττ 图2.3 平面应力问题 根据切应力互等定理,即应力张量的对称性,必然有0==xz yx ττ。
因而对于平面应力状态的应力张量为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=00000yyx xyx ij σττσσ也可写为⎥⎦⎤⎢⎣⎡=y yxxy x ij σττσσ 如果z 方向的尺寸为有限量,仍假设0=z σ,0==zy zx ττ,且认为x σ,y σ和xy τ(yx τ)为沿厚度的平均值,则这类问题称为广义平面应力问题。
2. 平面应变问题如果物体纵轴方向(oz 坐标方向)的尺寸很长,外荷载及体力为沿z 轴均匀分布地作用在垂直于oz 方向,如图2.4所示的水坝是这类问题的典型例子。
忽略端部效应,则因外载沿z 轴方向为一常数,因而可以认为,沿纵轴方向各点的位移与所在z 方向的位置无关,即z 方向各点的位移均相同。
令u 、v 、w 分别表示一点在x 、y 、z 坐标方向的位移分量,则有w 为常数。
等于常数的位移w 并不伴随产生任一xy 平面的翘曲变形,故研究应力、应变问题时,可取0=w 。
此外,由于物体的变形只在xy 平面内产生,因此w 与z 无关。
故对于平面应变状态有图2.4 平面应变问题⎪⎭⎪⎬⎫===0),(),(w y x v v y x u u由对称条件可知,在xy 平面内)(zx xz ττ和)(zy yz ττ恒等于零,但因z 方向对变形的约束,故z σ一般并不为零,所以其应力张量为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=z yyx xyx ij σσττσσ0000实际上z σ并不是独立变量,它可通过x σ和y σ求得,因此不管是平面应变问题还是平面应力问题,独立的应力分量仅有3个,即x σ、y σ和xy τ(=yx τ),对于平面应变问题的求解,可不考虑z σ。
三. 平衡微分方程物体在外力作用下处于平衡状态时,由各点应力分量与体力分量之间的关系所导出的方程称为平衡微分方程。
如图2.5a)所示的平面应力问题,除面力外,在这个微单元体上还有体力的作用.单位体积的体力在二个坐标轴上的投影为Y X ,.而固体的质量密度为ρ。
自弹性体内任一点P 处附近截取一单元体,a) b)图2.5 平面应力状态微元体的应力它在x ,y 方向的尺寸分别为dx 和dy 。
为了计算方便,在z 方向取单位长度,如图2.5b)所示。
该单元体受有其相邻部分对它作用的应力和单元体的体力。
由于在一般情况下应力分量是位置坐标的函数,因此在单元体左、右或上、下两对面上的应力不相等,而具有一微小的增量。
若作用于ab 上的正应力和剪应力分别为x σ,则作用于cd 面上的正应力应随之变化。
该变化可根据Taylor 级数展开,即),(022dy dx dy y dx x abx ab x ab x cd x +∂∂+∂∂+=σσσσ 由于ab,cd 线元上的应力分量均可用相应线元中点处的应力分量表示,以及略去二阶以上的微量后,由上式得cd 边上的正应力为 dx xx x ∂∂+σσ 同理,如ab 边上的切应力为xy τ,ad 边上的正应力和切应力分别为y σ,yx τ可得cd 边上的切应力及bc 边的应力分量可类推分别得 dx x xyxy ∂∂+ττ dyy dy yyxyx y y ∂∂+∂∂+ττσσ 微单元体在面力及体力作用下处于平衡,必须满足静力平衡的三个方程式。
如果考虑到质点运动,而按照牛顿第二定律,方程式的右边还应包括这个微单元体的质量与加速度在该坐标轴上的投影的乘积(即惯性力的投影)。
对于所研究的一点P 。
,设其位移在坐标铀y x ,上的投影分别为v u ,,加速度的投影可分别写为: 22t u ∂∂, 22tv ∂∂ 若弹性体处于平衡状态,则取自物体内的单元体也必处于平衡状态。
因而,根据0=∑x F )(2dxdy t u ∂∂=ρ,有 (dx x x x ∂∂+σσ)0)(=+-∂∂++-Xdxdy dx dx ydy dy yx yx yx x τττσ)(2dxdy t u ∂∂=ρ 将上式化简,并等式两边同除以dxdy ,可得 0=+∂∂+∂∂X yx xy x τσ()22t u ∂∂=ρ (2.2-1a) 由平衡方程式0=∑y F )22tv ∂∂=ρ,可类似导得0=+∂∂+∂∂Y y x yyx στ()22t v ∂∂=ρ (2.2-1b) 根据平衡方程0=∑a m 得0222)(2)(2)(2)(2222=-+∂∂-∂∂+-∂∂+∂∂++∂∂-∂∂dy Xdxdy dx Ydxdy dx dxdy tv dxdy dy y dy dxdy t u dydx dx x dy dydx x dx dydx y yx yx xy xy x yρττρττσσ 略去三阶微量的项,得yx xy ττ=这就是前面曾提到的切应力互等定理。
下面不再区分xy τ和yx τ。
式(2.2-1)为平面应力问题的平衡微分方程式,它表明了应力分量的变化与已知体力分量之间的关系;当改为括号内的项,就代表运动方程式,又称为柯西 (Chuchy )平衡运动微分方程。
式(2.2-1)是以平面应力为例导出的,对于平面应变问题,在图2.5(b)所示的单元体上,一般在前、后两个面上还作用有正应力z σ,但由于它们自成平衡,不影响方程的建立,因而,式(2.2-1)对两种平面问题都适用。
在建立上述方程时,我们是按照1.2节的小变形中假没,用物体变形以前的尺寸,而没有用变形后平衡状态下的尺寸。
在以后建立任何平衡力程式时,都将作同样的处理,不再加以说明。
对于三维应力状态的情况,可从受力物体中取出一微小六面体单元,可类似平面问题导出zx xz ττ= , zy yz ττ=以及 ⎪⎪⎪⎭⎪⎪⎪⎬⎫∂∂==+∂∂+∂∂+∂∂∂∂==+∂∂+∂∂+∂∂∂∂==+∂∂+∂∂+∂∂)(0)(0)(0222222t w Z z y x t v Y z y x t u X z y x z zy zx yz y yx xz xy x ρσττρτστρττσ (2.2-2) 式(2.2-2)为三维情况下的平衡微分方程。