实验三 PID控制器设计及其参数整定---已完成
- 格式:doc
- 大小:347.50 KB
- 文档页数:15

一、绪论PID 参数的整定就是合理的选取PID 三个参数。
从系统的稳定性、响应速度、超调量和稳态误差等方面考虑问题,三参数作用如下:比例调节作用:成比例地反映系统的偏差信号,系统一旦出现了偏差,比例调节立即产生与其成比例的调节作用,以减小偏差。
随着P K 增大,系统的响应速度加快,系统的稳态误差减小,调节应精度越高,但是系统容易产生超调,并且加大P K 只能减小稳态误差,却不能消除稳态误差。
比例调节的显著特点是有差调节。
积分调节作用:消除系统的稳态误差,提高系统的误差度。
积分作用的强弱取决于积分时间常数i T ,i T 越小,积分速度越快,积分作用就越强,系统震荡次数较多。
当然i T 也不能过小。
积分调节的特点是误差调节。
微分调节作用:微分作用参数d T 的作用是改善系统的动态性能,在d T 选择合适情况下,可以减小超调,减小调节时间,允许加大比例控制,使稳态误差减小,提高控制精度。
因此,可以改善系统的动态性能,得到比较满意的过渡过程。
微分作用特点是不能单独使用,通常与另外两种调节规律相结合组成PD 或PID 控制器。
二、设计内容1. 设计P 控制器控制器为P 控制器时,改变比例系数p K 大小。
P 控制器的传递函数为:()P P K s G =,改变比例系数p K 大小,得到系统的阶跃响应曲线当K=1时,P当K=10时,PK=50时,当P当P K =100时,p K 超调量σ% 峰值时间p T 上升时间r T 稳定时间s T 稳态误差ss e 1 49.8044 0.5582 0.2702 3.7870 0.9615 10 56.5638 0.5809 0.1229 3.6983 0.7143 50 66.4205 0.3317 0.1689 3.6652 0.3333 10070.71480.25060.07443.64100.2002仿真结果表明:随着P K 值的增大,系统响应超调量加大,动作灵敏,系统的响应速度加快。
PID控制器的参数整定及优化设计PID控制器是一种广泛应用于工业控制系统中的控制算法。
它的主要作用是根据被控对象的输入信号和输出信号之间的差异来调节控制器的输出信号,从而使被控对象的输出稳定在期望值附近。
而参数整定和优化设计是保证PID控制器能够正常工作和发挥最佳性能的关键。
参数整定是指根据被控对象的特性,选择合适的PID控制器参数,以确保系统的稳定性和快速响应。
参数整定一般分为两个步骤:初步参数整定和精细参数整定。
初步参数整定是通过经验法则或试验方法找到一个较为接近的参数组合,使得系统的响应能够满足基本需求。
常用的初步参数整定方法有:1.经验法则:根据被控对象的特性(如惯性、时滞等)选择经验的比例、积分和微分系数,并根据经验法则进行组合,如经验法则(1/4、1/2、1/8)。
2. Ziegler-Nichols方法:通过改变比例系数和积分时间来观察系统的响应特性,并根据一些准则选择合适的参数。
这种方法包括震荡法、临界比例法和临界周期法。
精细参数整定是通过对系统进行细致的分析和调整,以得到更加理想的控制性能。
常用的精细参数整定方法有:1.调整比例系数:增大比例系数可以提高系统的响应速度,但过大的比例系数可能导致系统震荡。
减小比例系数可以减小震荡,但会降低系统的响应速度。
2.调整积分时间:增大积分时间可以减小系统的静差,但过大的积分时间可能导致系统过冲或震荡。
3.调整微分时间:增大微分时间可以提高系统的稳定性,但过大的微分时间可能导致系统的噪声放大。
4.频率响应法:通过对系统的频率响应进行分析,计算出合适的PID 参数。
5.理论模型方法:通过建立系统的数学模型,采用现代控制理论方法进行参数整定。
优化设计是指对PID控制器的参数进行进一步调整,以满足系统优化的性能指标。
常用的优化设计方法有:1.最小二乘法:通过最小化控制误差的平方和来优化PID控制器的参数。
2.遗传算法:通过模拟自然进化的过程,利用种群中的个体进行参数和优化。
实验五 系统 PID 控制器设计及其参数整定一、实验目的(1) 掌握 PID 控制规律及控制器实现。
(2) 对给定系统合理地设计 PID 控制器。
(3) 掌握对给定控制系统进行 PID 控制器参数在线实验工程整定的方法。
二、实验原理在串联校正中,比例控制可提高系统开环增益,减小系统稳态误差,提高系统的控制 精度,但会降低系统的相对稳定性,甚至可能造成系统闭环系统不稳定;积分控制可以提 高系统的型别(无差度),有利于提高系统稳态性能,但积分控制增加了一个位于原点的 开环极点。
使信号产生 90°的相位滞后,于系统的稳定不利,故不宜采用单一的积分控制 器;微分控制规律能反映输入信号的变化趋势,产生有效的早期修正信号,以增加系统的 阻尼程度,从而改善系统的稳定性,但微分控制增加了一个-1/τ 的开环零点,使系统的相 角裕度提高,因此有助于系统稳态性能的改善。
在串联校正中,PI 控制器增加了一个位于原点的开环极点,同时也增加了一个位于 s 左半平面的开环零点。
位于原点的开环极点可以提高系统的型别(无差度),减小稳态误 差,有利于提高系统稳态性能;负的开环零点可以减小系统的阻尼,缓和 PI 极点对系统产 生的不利影响。
只要积分时间常数 T i 足够大,PI 控制器对系统的不利影响可大为减小。
PI 控制器主要用来改善控制系统的稳态性能。
在串联校正中,PID 控制器增加了一个位于原点的开环极点,和两个位于 s 左半平面 的开环零点。
除了具有 PI 控制器的优点外,还多了一个负实零点,动态性能比 PI 更具有 优越性。
通常应使积分发生在低频段,以提高系统的稳态性能,而使微分发生在中频段, 以改善系统的动态性能。
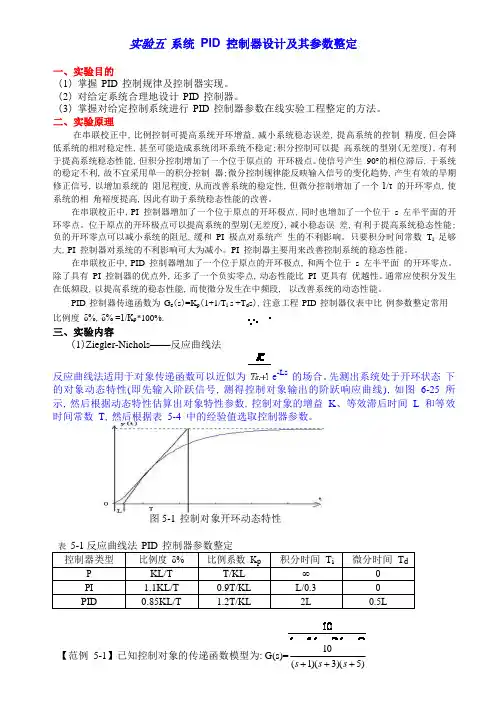
PID 控制器传递函数为 G e (s )=K p (1+1/T i s +T d s ),注意工程 PID 控制器仪表中比 例参数整定常用比例度 δ%,δ% =1/K p *100%.三、实验内容(1)Ziegler-Nichols ——反应曲线法反应曲线法适用于对象传递函数可以近似为 e -Ls的场合。
PID控制器的参数整定PID控制器是一种常用的闭环控制器,可以根据系统的输入和输出之间的误差来调整控制器的参数,从而实现对系统的稳定控制。
PID控制器的参数整定是指确定控制器的比例系数Kp、积分时间Ti和微分时间Td的过程。
下面将详细介绍PID控制器的参数整定方法和相关的考虑因素。
一、参数整定方法:1.经验整定法:根据经验将控制器的参数进行初步设定。
经验整定法通常通过试验或先验知识来确定参数,根据具体的应用场景不断调整,以达到较好的控制效果。
该方法常用与简单的控制系统或者无法获得系统数学模型的情况下。
2. Ziegler-Nichols整定法:Ziegler-Nichols整定法是一种基于试验的整定方法。
该方法首先暂时关闭积分和微分控制,只调整比例控制系数Kp,使系统达到临界稳定状态。
然后测量临界增益Ku和临界周期Pu,根据不同类型的控制系统(比例型、积分型和微分型),采用不同的参数整定公式确定Kp、Ti和Td的初始值,再根据系统的实际响应实时调整。
3. Ziegler-Nichols改进整定法(Chien-Hrones-Reswich法):该方法是对Ziegler-Nichols整定法的改进,可以更精确地测定控制器参数。
该方法同样通过测量系统的临界增益Ku和临界周期Pu,但是对参数的计算公式进行了修正,提高了参数整定的准确性。
4. 极点配置法(Pole Placement):极点配置法是一种基于系统数学模型的整定方法。
通过分析系统的传递函数,确定控制器的极点位置,从而使系统的闭环响应满足所需的性能指标。
该方法需要对系统的数学模型有较详细的了解,适用于相对复杂的控制系统。
5.自整定法:自整定法是一种自动寻优的整定方法,常用于智能控制器中。
该方法通过观察系统的动态性能,通过迭代寻找最优的参数组合。
自整定法通常采用优化算法(如遗传算法、粒子群算法等)来最优参数,在一定的性能和收敛速度之间进行权衡。
二、参数整定的考虑因素:1.系统的稳定性:控制器的参数整定应确保系统的闭环响应稳定。
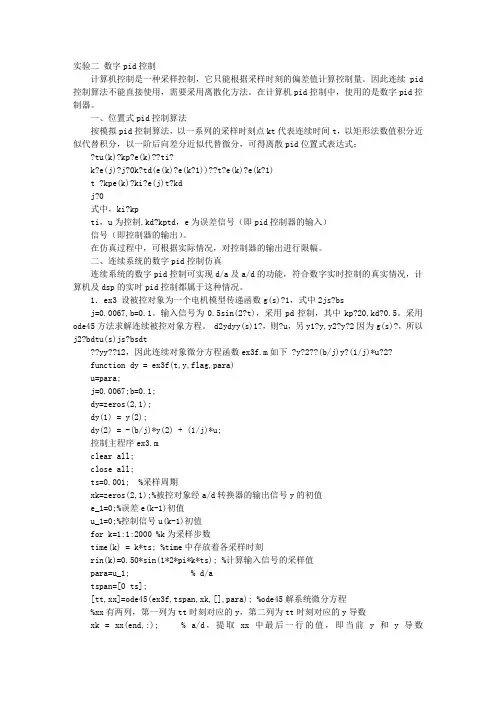
实验二数字pid控制计算机控制是一种采样控制,它只能根据采样时刻的偏差值计算控制量。
因此连续pid控制算法不能直接使用,需要采用离散化方法。
在计算机pid控制中,使用的是数字pid控制器。
一、位置式pid控制算法按模拟pid控制算法,以一系列的采样时刻点kt代表连续时间t,以矩形法数值积分近似代替积分,以一阶后向差分近似代替微分,可得离散pid位置式表达式:?tu(k)?kp?e(k)??ti?k?e(j)?j?0k?td(e(k)?e(k?1))??t?e(k)?e(k?1) t ?kpe(k)?ki?e(j)t?kdj?0式中,ki?kpti,u为控制,kd?kptd,e为误差信号(即pid控制器的输入)信号(即控制器的输出)。
在仿真过程中,可根据实际情况,对控制器的输出进行限幅。
二、连续系统的数字pid控制仿真连续系统的数字pid控制可实现d/a及a/d的功能,符合数字实时控制的真实情况,计算机及dsp的实时pid控制都属于这种情况。
1.ex3 设被控对象为一个电机模型传递函数g(s)?1,式中2js?bs j=0.0067,b=0.1。
输入信号为0.5sin(2?t),采用pd控制,其中kp?20,kd?0.5。
采用ode45方法求解连续被控对象方程。
d2ydyy(s)1?,则?u,另y1?y,y2?y?2因为g(s)?,所以j2?bdtu(s)js?bsdt??yy??12,因此连续对象微分方程函数ex3f.m如下 ?y?2??(b/j)y?(1/j)*u?2? function dy = ex3f(t,y,flag,para) u=para; j=0.0067;b=0.1;dy=zeros(2,1);dy(1) = y(2);dy(2) = -(b/j)*y(2) + (1/j)*u;控制主程序ex3.mclear all;close all;ts=0.001; %采样周期xk=zeros(2,1);%被控对象经a/d转换器的输出信号y的初值e_1=0;%误差e(k-1)初值u_1=0;%控制信号u(k-1)初值for k=1:1:2000 %k为采样步数time(k) = k*ts; %time中存放着各采样时刻rin(k)=0.50*sin(1*2*pi*k*ts); %计算输入信号的采样值para=u_1; % d/a tspan=[0 ts];[tt,xx]=ode45(ex3f,tspan,xk,[],para); %ode45解系统微分方程%xx有两列,第一列为tt时刻对应的y,第二列为tt时刻对应的y导数xk = xx(end,:); % a/d,提取xx中最后一行的值,即当前y和y导数yout(k)=xk(1); %xk(1)即为当前系统输出采样值y(k) e(k)=rin(k)-yout(k);%计算当前误差de(k)=(e(k)-e_1)/ts; %计算u(k)中微分项输出u(k)=20.0*e(k)+0.50*de(k);%计算当前u(k)的输出%控制信号限幅if u(k)>10.0u(k)=10.0;endif u(k)<-10.0u(k)=-10.0;end %更新u(k-1)和e(k-1)u_1=u(k);e_1=e(k);endfigure(1);plot(time,rin,r,time,yout,b);%输入输出信号图xlabel(time(s)),ylabel(rin,yout); figure(2);plot(time,rin-yout,r);xlabel(time(s)),ylabel(error);%误差图程序运行结果显示表1所示。
T13. PID自动控制系统参数整定(化工仪表与自动化,指导教师:卢红梅)实验一:一阶单容上水箱对象特性测试实验实验二:上水箱液位PID整定实验一、实验目的1)、通过实验熟悉单回路反馈控制系统的组成和工作原理。
2)、分析分别用P、PI和PID调节时的过程图形曲线。
3)、定性地研究P、PI和PID调节器的参数对系统性能的影响。
4)、通过实验熟悉单回路反馈控制系统的组成和工作原理。
5)、分析分别用P、PI和PID调节时的过程图形曲线。
6)、定性地研究P、PI和PID调节器的参数对系统性能的影响。
二、实验设备THKJ100-1型过程控制实验装置配置:上位机软件、计算机、RS232-485转换器1只、串口线1根、实验连接线。
型参数为串联釜数N三、实验原理实验一原理:阶跃响应测试法是系统在开环运行条件下,待系统稳定后,通过控制器或其他操作器,手动改变对象的输入信号(阶跃信号)。
同时,记录对象的输出数据或阶跃响应曲线,然后根据已给定对象模型的结构形式,对实验数据进行处理,确定模型中各参数。
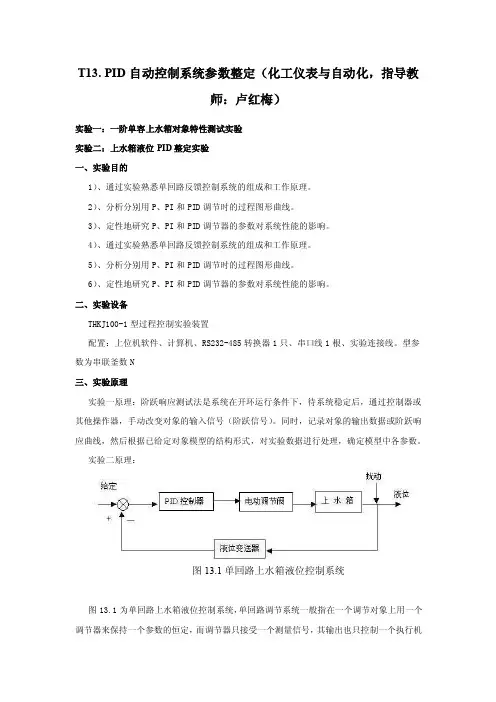
实验二原理:图13.1单回路上水箱液位控制系统图13.1为单回路上水箱液位控制系统,单回路调节系统一般指在一个调节对象上用一个调节器来保持一个参数的恒定,而调节器只接受一个测量信号,其输出也只控制一个执行机构。
本系统所要保持的恒定参数是液位的给定高度,即控制的任务是控制上水箱液位等于给定值所要求的高度。
根据控制框图,这是一个闭环反馈单回路液位控制,采用工业智能仪表控制。
当调节方案确定之后,接下来就是整定调节器的参数,一个单回路系统设计安装就绪之后,控制质量的好坏与控制器参数选择有着很大的关系。
合适的控制参数,可以带来满意的控制效果。
反之,控制器参数选择得不合适,则会使控制质量变坏,达不到预期效果。
因此,当一个单回路系统组成好以后,如何整定好控制器参数是一个很重要的实际问题。
一个控制系统设计好以后,系统的投运和参数整定是十分重要的工作。

PID参数的设置与调节PID控制简介目前工业自动化水平已成为衡量各行各业现代化水平的一个重要标志。
同时,控制理论的发展也经历了古典控制理论、现代控制理论和智能控制理论三个阶段。
智能控制的典型实例是模糊全自动洗衣机等。
自动控制系统可分为开环控制系统和闭环控制系统。
一个控控制系统包括控制器﹑传感器﹑变送器﹑执行机构﹑输入输出接口。
控制器的输出经过输出接口﹑执行机构﹐加到被控系统上﹔控制系统的被控量﹐经过传感器﹐变送器﹐通过输入接口送到控制器。
不同的控制系统﹐其传感器﹑变送器﹑执行机构是不一样的。
比如压力控制系统要采用压力传感器。
电加热控制系统的传感器是温度传感器。
目前,PID控制及其控制器或智能PID控制器(仪表)已经很多,产品已在工程实际中得到了广泛的应用,有各种各样的PID控制器产品,各大公司均开发了具有PID参数自整定功能的智能调节器(intellig ent regulator),其中PID控制器参数的自动调整是通过智能化调整或自校正、自适应算法来实现。
有利用PID控制实现的压力、温度、流量、液位控制器,能实现PID控制功能的可编程控制器(PLC),还有可实现PID控制的PC系统等等。
可编程控制器(PLC)是利用其闭环控制模块来实现PID控制,而可编程控制器(PLC)可以直接与Cont rolNet相连,如Rockwell的PLC-5等。
还有可以实现PID控制功能的控制器,如Rockwell的Logix产品系列,它可以直接与Contro lNet相连,利用网络来实现其远程控制功能。
1、开环控制系统开环控制系统(open-loop control system)是指被控对象的输出(被控制量)对控制器(controller)的输出没有影响。
在这种控制系统中,不依赖将被控量反送回来以形成任何闭环回路。
2、闭环控制系统闭环控制系统(closed-loop control system)的特点是系统被控对象的输出(被控制量)会反送回来影响控制器的输出,形成一个或多个闭环。
PID控制原理与参数的整定方法PID控制器是一种常用的自动控制器,在工业控制中广泛应用。
它的原理很简单,即通过不断调节控制信号来使被控制物体的输出接近给定值。
PID控制器由比例(P)、积分(I)和微分(D)三个控制参数组成。
下面将详细介绍PID控制的原理和参数整定方法。
一、PID控制原理1.比例(P)控制比例控制根据被控制量的偏差的大小,按照一定比例调节控制量的大小。
当偏差较大时,调节量增大;当偏差较小时,调节量减小。
此项控制可以使系统快速响应,并减小系统稳态误差。
2.积分(I)控制积分控制根据被控制物体的偏差的积分值来调节控制量。
积分控制的作用主要是消除系统的稳态误差。
当偏差较小但持续较长时间时,积分量会逐渐增大,以减小偏差。
3.微分(D)控制微分控制根据被控制物体的偏差的变化率来调节控制量。
当偏差的变化率较大时,微分量会增大,以提前调整控制量。
微分控制可以减小系统的超调和振荡。
综合比例、积分和微分控制,PID控制器可以通过不同的控制参数整定来适应不同的被控制物体的特性。
二、PID控制参数整定方法1.经验整定法经验整定法是根据对被控制系统的调试经验和运行情况来选择控制参数的方法。
它是通过实际试验来调整控制参数,通过观察系统的响应和稳定性来判断参数的合理性。
2. Ziegler-Nichols整定法Ziegler-Nichols整定法是根据系统的临界响应来选择PID控制参数的方法。
在该方法中,首先将I和D参数设置为零,然后不断提高P控制参数直到系统发生临界振荡。
根据振荡周期和振荡增益的比值来确定P、I和D的参数值。
3.设计模型整定法设计模型整定法是根据对被控系统的数学建模来确定PID控制参数的方法。
通过建立被控系统的数学模型,分析其频率响应和稳态特性,从而设计出合理的控制参数。
4.自整定法自整定法是通过主动调节PID控制器的参数,使被控系统的输出能够接近给定值。
该方法可以通过在线自整定或离线自整定来实现。
PID控制器的参数整定(1)PID是比例,积分,微分的缩写.比例调节作用:是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。
比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定。
积分调节作用:是使系统消除稳态误差,提高无差度。
因为有误差,积分调节就进行,直至无差,积分调节停止,积分调节输出一常值。
积分作用的强弱取决与积分时间常数Ti,Ti越小,积分作用就越强。
反之Ti大,则积分作用弱,加入积分调节可使系统稳定性下降,动态响应变慢。
积分作用常与另两种调节规律结合,组成PI调节器或PID调节器。
微分调节作用:微分作用反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,因此能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除。
因此,可以改善系统的动态性能。
在微分时间选择合适情况下,可以减少超调,减少调节时间。
微分作用对噪声干扰有放大作用,因此过强的加微分调节,对系统抗干扰不利。
此外,微分反应的是变化率,而当输入没有变化时,微分作用输出为零。
微分作用不能单独使用,需要与另外两种调节规律相结合,组成PD或PID控制器。
(2) PID具体调节方法①方法一确定控制器参数数字PID控制器控制参数的选择,可按连续-时间PID参数整定方法进行。
在选择数字PID参数之前,首先应该确定控制器结构。
对允许有静差(或稳态误差)的系统,可以适当选择P或PD控制器,使稳态误差在允许的范围内。
对必须消除稳态误差的系统,应选择包含积分控制的PI或PID控制器。
一般来说,PI、PID和P控制器应用较多。
对于有滞后的对象,往往都加入微分控制。
选择参数控制器结构确定后,即可开始选择参数。
参数的选择,要根据受控对象的具体特性和对控制系统的性能要求进行。
工程上,一般要求整个闭环系统是稳定的,对给定量的变化能迅速响应并平滑跟踪,超调量小;在不同干扰作用下,能保证被控量在给定值;当环境参数发生变化时,整个系统能保持稳定,等等。
PID 控制器参数整定设计方案2 总体方案设计对系统进行PID 控制的设定,当系统的被控对象很复杂时,难以用解析法建立数学模型,可用Z ——N 法去调整PID 控制器的参数,非常实用,有效和方便。
Z ——N 法有两种实施的办法,共同的目标是使被控系统的阶跃响应具有25%的超调量。
于是就有了下面两种方案。
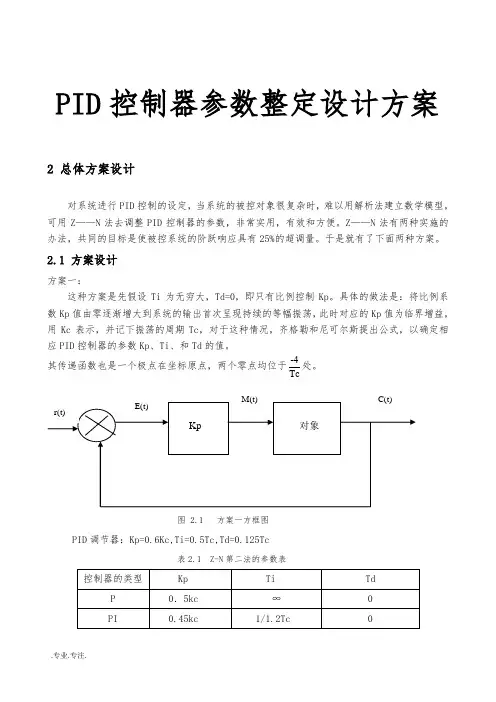
2.1 方案设计方案一:这种方案是先假设Ti 为无穷大,Td=0,即只有比例控制Kp 。
具体的做法是:将比例系数Kp 值由零逐渐增大到系统的输出首次呈现持续的等幅振荡,此时对应的Kp 值为临界增益,用Kc 表示,并记下振荡的周期Tc ,对于这种情况,齐格勒和尼可尔斯提出公式,以确定相应PID 控制器的参数Kp 、Ti 、和Td 的值。
其传递函数也是一个极点在坐标原点,两个零点均位于-4Tc处。
图 2.1 方案一方框图 PID 调节器:Kp=0.6Kc,Ti=0.5Tc,Td=0.125Tc 表2.1 Z-N 第二法的参数表表2.2 Z-N第一法的参数表2.2方案论证方法一临界比例法简单并且是闭环,使用起来比第二种方案范围要大点。
第二种响应曲线法有一个缺点就是必须要S型的响应曲线,并且第二种方案是开环的,容易受到干扰,使得PID控制不准确。
2.3方案选择通过分析题目和课程设计要求,我认为选择第一种方案更为简单和准确,因为第二种方案的要求(S型曲线)题目可能不能达到。
还需要花时间证明是否是S型曲线。
所以比起方案一要复杂的多,耗费的时间也更多,所以我选用方案一来完成本次课程设计。
3 单元模块设计3.1对系统性能指标进行分析由设计要求可以得知,系统是在受到阶跃信号后产生相应的,由Matlab的simulink进行了仿真图的搭建,如图3.1所示:图3.1 校正前连线图在matlab操作环境中键入以下程序,会得到系统的阶跃响应的曲线图和伯德图,图3.2为matlab绘制的其闭环传递函数的单位阶跃响应曲线,图3.3为matlab绘制的其闭环传递函数的伯德图。
PID控制器参数整定设计方案1.确定控制目标和性能要求首先,需要明确控制系统的目标和性能要求。
例如,控制对象是一个温度系统,控制目标是将系统稳定在设定温度,并且要求系统快速响应、无超调、无稳态误差等。
根据这些要求,可以进一步确定适当的控制器参数范围。
2.初始参数设定根据经验或理论推导,可以先设定一个初始的PID参数。
比如,将比例系数Kp设置为0.1,积分时间Ti设置为10,微分时间Td设置为0。
这只是一个初始值,后续会通过试控和调整来优化参数。
3.试控将设定值输入到控制系统中,观察系统响应,并记录下时间响应曲线、超调量和稳态误差等指标。
通过试控可以初步了解系统的动态特性以及初始参数的合理性。
4. Ziegler-Nichols整定法根据试控结果,可以运用Ziegler-Nichols整定法对PID参数进行初步调整。
该方法通过试控系统,并观察系统的临界点,从而确定比例增益临界点Ku和临界周期Tu。
根据Ku和Tu可以计算出合适的比例系数Kp、积分时间Ti和微分时间Td。
a. 按照Ziegler-Nichols整定法的规则,可以将Kp设置为Ku/2,将Ti设置为0.5*Tu,将Td设置为0.125*Tu。
b.通过修改参数后,再次进行试控,并观察系统响应指标,如超调量和稳态误差。
5.积分时间调整根据试控结果,调整积分时间Ti。
如果系统存在较大的超调量,可以适当增大积分时间;如果系统存在稳态误差,可以适当减小积分时间。
进行参数调整后,再次试控,观察系统指标。
6.微分时间调整根据试控结果,调整微分时间Td。
如果系统存在振荡或超调量过大的问题,可以试图增大微分时间;如果系统响应过慢或存在过度补偿问题,可以适当减小微分时间。
再次进行试控,观察指标。
7.参数精细调整通过多次试控和参数调整,逐步优化PID参数。
可以根据实际情况,对比试控结果,逐步调整比例系数Kp、积分时间Ti和微分时间Td。
一般来说,需要经过多轮试控和参数调整,才能达到最优控制效果。
PID控制器参数整定设计方案PID控制器是一种常用的控制算法,能够根据反馈信号对控制系统进行自动校正。
PID控制器的参数整定是指确定其比例增益Kp、积分时间Ti和微分时间Td的过程,以达到系统稳定、快速响应和抗干扰能力强的目标。
参数整定的设计方案可以分为经验法、试验法和数学优化法。
其中经验法是基于经验公式或规则进行参数选择,简单易行;试验法是通过实际系统的频率响应或阶跃响应进行参数优化;数学优化法是通过数学模型和数学方法进行参数优化,可以充分利用系统信息,但计算复杂度较高。
一、经验法:1.负载法:保持系统稳定工作,逐步增大比例增益Kp,观察系统是否出现超调或振荡现象,选择合适的Kp值。
2.相位裕量法:通过观察系统频率响应曲线,选取合适的相位裕量来确定Kp和Ti的初值。
3. Ziegler-Nichols法:通过输出曲线中的时间常数和周期来确定Kp和Ti的初值。
二、试验法:1.阶跃响应法:对系统进行单位阶跃输入,观察输出响应曲线,根据超调量和上升时间来确定参数。
2.频率法:通过改变系统输入信号的频率,观察输出幅频特性曲线,选取合适的增益裕量来确定参数。
3.周响应法:对系统进行周期性输入,观察输出响应曲线,根据周期和振幅的变化来确定参数。
三、数学优化法:1.差分演化算法:通过仿真模型进行参数优化,在一定迭代次数内找到使系统性能最优的参数组合。
2.遗传算法:通过模拟自然中的优胜劣汰和基因传递机制,生成一组符合条件的参数,并通过交叉和突变进行进一步优化。
在实际应用中,可以综合使用以上不同的参数整定方法,根据系统特点和需求来确定参数。
同时,还可以考虑使用自适应控制算法,如模糊PID、自适应PID等,根据系统响应实时调整参数,提高控制效果。
需要注意的是,参数整定过程中需要考虑系统的稳定性、稳态误差、响应速度和抗干扰能力等多个指标,并进行合理的权衡。
此外,实际系统中可能存在不确定性或变动性因素,要做好参数调整的适应性和鲁棒性设计。
实验三PID调节器及参数整定一.实验目的:通过Simulink仿真,使学生了解FID控制器的参数(P. I> D)对系统性能(动态性能和稳态性能)的影响。
二、实验设备PC机及MATLAB平台三、实验原理及方法1、模型文件的建立在命令窗口(matlab conmand window)键入simulink (或在MATLAB窗口中单击按纽岭),就出现一个称为Simulink Library Browser的窗口。
在这个窗口中列出了按功能分类的各种模块的名称。
以往十分困难的系统仿真问题,用SIMULINK只需拖动鼠标即可轻而易举地解决问题。
若想建立一个模型文件(.mdl),则选取文件/New/Model菜单项,Simulink 就会打开一个名为Untiled的模型窗口。
2、S IMULINK环境介绍双击simulink库中模块simulink前面的"+"就出现如图所示的窗口。
此即是SIMULINK环境。
一般而言,simulink提供以下8类模块。
(1)Continuous:连续模块(2)Discrete:离散模块(3)Functions & Table:函数和表格模块(4)Math:数学模块(5)Nonlinear:线性模块(6)Signals & Systems:信号和系统模块(7)Sinks:输出设备模块(8)Sources:输入源模块3、S IMULINK仿真的运行前面我们介绍了如何创建一个Simulink模型,构建好一个系统的模型之后,接下来的事情就是运行模型,得出仿真结果。
运行一个仿真的完整过程分成三个步骤:设置仿真参数,启动仿真和仿真结果分析。
四、实验内容:1、被控制对象传递函数为G⑸一仝)°试设计PID调节器,s(s" + 30s + 200)研究比例调节器(P)、比例积分调节器(PI)、比例微分积分调节器(PID) 对系统性能的影响;原仿真系统仿真框图:原系统输出:加入PID后的仿真系统框图:加入比例调节器(P)后系统的输出:1.8 o.a 1 --------- 11 -------- 1 -------- 1 --------- 1 | -------- 1 --------- 1(---------- 1A 1 /l1i 1 1 tLi... I J 1 1r■L I .......1 J __________ !1 I i i I1!i i i1 I0.2 1235791.6 1.41.21O.G 04 加入比例积分调节器(PI)后系统的输出: 加入比例微分积分调节器(PID)后系统的输出:1.8结论:由图可知,控制器的比例增益能及时.快速地对系统进行调节,但是会降低系统稳定性降低;FI调节器提高系统稳态精度,PID调节器既提高系统稳态精度又改善系统动态性能。
PID控制器参数整定一、实验目的及要求1. 掌握PID各环节的作用,并应用于调节器的设计。
2. 掌握PID参数整定的方法(试凑法)。
二、实验内容设计MA TLAB的M文件,实现PID调节器的功能,分析Kp、Kd、Ki三个参数对系统性能的影响,掌握试凑法。
三、实验步骤进入MATLAB命令窗口,新建M-file,输入设计好的程序。
检查错误,调试,然后运行。
按照试凑法的步骤,观察系统对不同参数的阶跃响应的曲线,分析其原因,并做好仿真记录。
四、实验报告要求1. 叙述Kp、Kd、Ki三个参数对系统性能的影响。
2. 阐述用试凑法进行PID参数整定的一般过程,并记录整定过程中阶跃响应的曲线。
五、实验程序参考%Increment PID Controllerclear all;close all;ts=0.01;sys=tf(1,[0.1,1]); %执行器传递函数,S域dsys=c2d(sys,ts,'z'); %转化到Z域[num,den]=tfdata(dsys,'v'); %取得传递函数的分子和分母系数u_1=0.0;u_2=0.0;u_3=0.0;y_1=0;y_2=0;y_3=0;x=[0,0,0]';error_1=0;error_2=0;for k=1:1:100time(k)=k*ts;rin(k)=1.0;kp=4;ki=0.4;kd=2;du(k)=kp*x(1)+kd*x(2)+ki*x(3);u(k)=u_1+du(k);if u(k)>=100u(k)=100;endif u(k)<=-100u(k)=-100;end%yout(k)=-den(2)*y_1-den(3)*y_2+num(2)*u_1+num(3)*u_2;yout(k)=-den(2)*y_1+num(2)*u_1;error=rin(k)-yout(k);u_3=u_2;u_2=u_1;u_1=u(k);y_3=y_2;y_2=y_1;y_1=yout(k);x(1)=error-error_1; %Calculating Px(2)=error-2*error_1+error_2; %Calculating Dx(3)=error; %Calculating Ierror_2=error_1;error_1=error;endplot(time,rin,'b',time,yout,'r');xlabel('time(s)');ylabel('rin,yout');。
PID控制器的参数整定(1)PID是比例,积分,微分的缩写.比例调节作用:是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。
比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定。
积分调节作用:是使系统消除稳态误差,提高无差度。
因为有误差,积分调节就进行,直至无差,积分调节停止,积分调节输出一常值。
积分作用的强弱取决与积分时间常数Ti,Ti越小,积分作用就越强。
反之Ti大,则积分作用弱,加入积分调节可使系统稳定性下降,动态响应变慢。
积分作用常与另两种调节规律结合,组成PI调节器或PID调节器。
微分调节作用:微分作用反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,因此能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除。
因此,可以改善系统的动态性能。
在微分时间选择合适情况下,可以减少超调,减少调节时间。
微分作用对噪声干扰有放大作用,因此过强的加微分调节,对系统抗干扰不利。
此外,微分反应的是变化率,而当输入没有变化时,微分作用输出为零。
微分作用不能单独使用,需要与另外两种调节规律相结合,组成PD或PID控制器。
(2) PID具体调节方法①方法一确定控制器参数数字PID控制器控制参数的选择,可按连续-时间PID参数整定方法进行。
在选择数字PID参数之前,首先应该确定控制器结构。
对允许有静差(或稳态误差)的系统,可以适当选择P或PD控制器,使稳态误差在允许的范围内。
对必须消除稳态误差的系统,应选择包含积分控制的PI或PID控制器。
一般来说,PI、PID和P控制器应用较多。
对于有滞后的对象,往往都加入微分控制。
选择参数控制器结构确定后,即可开始选择参数。
参数的选择,要根据受控对象的具体特性和对控制系统的性能要求进行。
工程上,一般要求整个闭环系统是稳定的,对给定量的变化能迅速响应并平滑跟踪,超调量小;在不同干扰作用下,能保证被控量在给定值;当环境参数发生变化时,整个系统能保持稳定,等等。
实验三 PID 控制器设计及其参数整定一、实验目的1) 通过本实验,掌握使用Simulink 仿真设计连续和离散PID 控制器的方法。
2) 掌握对给定控制系统进行PID 控制器参数在线实验工程整定的方法。
二、实验原理PID 控制是最经典、应用最广泛的控制方法,是单回路控制系统主要的控制方法,是其他控制思想的基础。
本实验针对被控对象,选定控制器的调节规律,在控制器的调节规律已经确定的情况下,控制系统的品质主要决定于控制器参数的整定。
1. 连续PID 控制器本实验采用的PID 控制器传递函数为:111()(1)(1)C p d d i i G s K T S T S T S T Sδ=++=++ 或写成:()iC p d K G s K K S S=++ 有,p i d p d iK K K K T T ==其中K p 、K i 、K d 分别为比例系数、积分系数和微分系数;T i 、T d 分别为积分时间常数和微分时间常数;δ为比例度。
控制系统的Simulink 仿真图如图1所示。
连续PID 控制器如图2所示。
根据不同的参数设置,可以得到单纯的比例控制、比例积分控制、比例微分控制以及比例积分微分控制等不同的控制系统。
控制器参数的工程整定实验法,是通过对典型输入响应曲线所得到的特征量,按照动态特性参数法、衰减曲线法、临界比例度法、或经验法中的某一种方法,求得控制器的各个参数,进行工程整定,使系统的性能达到最佳。
图1 控制系统Simulink 仿真图图2 连续PID 控制器Simulink 仿真图2. 离散PID 控制器将描述模拟PID 控制器的微分方程式化为差分方程,即为数字PID 控制算法。
1()(1)()()()kp i di e k e k u k K e k K T e i K T=--=++∑因为上式包含的数字积分项,需要存储过去全部偏差量,而且累加运算编程不太方便,计算量也较大,所以在应用中,通常都是将上式改为增量算法。
实验三 PID 控制器设计及其参数整定
一、实验目的
1) 通过本实验,掌握使用Simulink 仿真设计连续和离散PID 控制器的方法。
2) 掌握对给定控制系统进行PID 控制器参数在线实验工程整定的方法。
二、实验原理
PID 控制是最经典、应用最广泛的控制方法,是单回路控制系统主要的控制方法,是其他控制思想的基础。
本实验针对被控对象,选定控制器的调节规律,在控制器的调节规律已经确定的情况下,控制系统的品质主要决定于控制器参数的整定。
1. 连续PID 控制器
本实验采用的PID 控制器传递函数为:
111()(1)(1)C p d d i i G s K T S T S T S T S
δ=+
+=++ 或写成:
()i
C p d K G s K K S S
=+
+ 有
,p i d p d i
K K K K T T =
=
其中K p 、K i 、K d 分别为比例系数、积分系数和微分系数;T i 、T d 分别为积分时间常数和微分时间常数;δ为比例度。
控制系统的Simulink 仿真图如图1所示。
连续PID 控制器如图2所示。
根据不同的参数设置,可以得到单纯的比例控制、比例积分控制、比例微分控制以及比例积分微分控制等不同的控制系统。
控制器参数的工程整定实验法,是通过对典型输入响应曲线所得到的特征量,按照动态特性参数法、衰减曲线法、临界比例度法、或经验法中的某一种方法,求得控制器的各个参数,进行工程整定,使系统的性能达到最佳。
图1 控制系统Simulink 仿真图
图2 连续PID 控制器Simulink 仿真图
2. 离散PID 控制器
将描述模拟PID 控制器的微分方程式化为差分方程,即为数字PID 控制算法。
1
()(1)
()()()k
p i d
i e k e k u k K e k K T e i K T
=--=++∑
因为上式包含的数字积分项,需要存储过去全部偏差量,而且累加运算编程不太方便,计算量也较大,所以在应用中,通常都是将上式改为增量算法。
()()(1)
()2(1)(2)[()(1)]()p I D
u k u k u k e k e k e k K e k e k K Te k K T
∆=----+-=--++
即
()(1)()u k u k u k =-+∆
数字增量式PID控制器如图3所示。
图3 数字增量式PID控制器Simulink仿真图
三、实验内容
1)建立如图1所示的Simulink仿真系统图。
2)采用图2的连续控制器,分别设置成纯比例控制、PI控制、PID控制,通过
改变PID参数,记录参数值和仿真结果,分析比例系数、积分系数、微分系数的作用。
纯比例控制kp分别为0.2;0.4;0.5;0.6;0.7;0.8;1.0如下:
Kp=0.2
Kp=0.4
Kp=0.5
Kp=0.6
Kp=0.7
Kp=0.8
Kp=1.0
可以看出曲线随着Kp值的增大,系统响应速度加快,系统的超调随着增加,最大偏差变小,震荡频率变高,调节时间也随着增长
将微分环节去除,控制器将变成PI比例积分控制器进行仿真:
比例系数Kp=1,积分时间常数Ti分别取值1,1.5,2,5,10,15 。
得到一系列曲线的变化,如下:
Ti=1
Ti=1.5
Ti=2
Ti=5
Ti=10
Ti=15
经对比对分析增大积分时间常数,有利于减小超调量,减小振荡,但系统的调整时间会有所增加。
采用pid控制时,经多次验证kp=0.7;ti=10;td=0.005时有较好控制效果,如图:
3)采用工程整定法,通过调整PID参数达到满意的控制效果,记录整定步骤,
PID控制器参数值和仿真结果。
用经验试凑法多次验证kp=0.7;ti=10;td=0.005时有最好控制效果
4)采用图3的数字增量式PID控制器,重复3的步骤。
四、实验报告
1)按照实验报告所要求的统一格式,填写实验5报告;
2)记录实验过程、实验结果和图;表。
3);根据实验过程和结果进行分析。