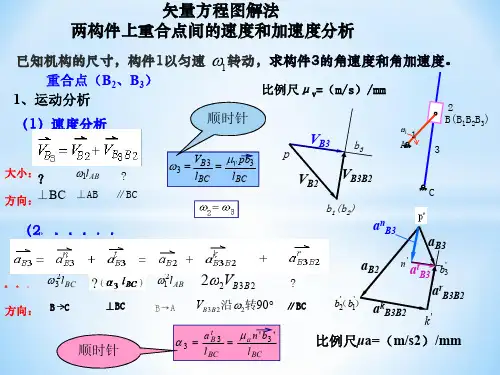
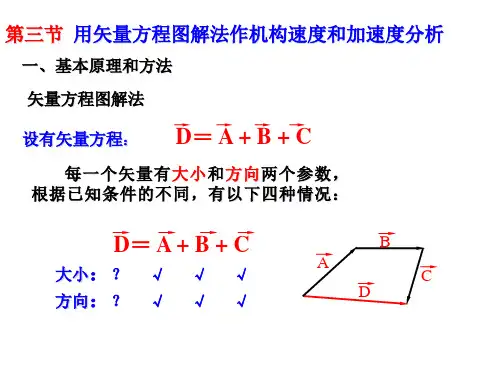
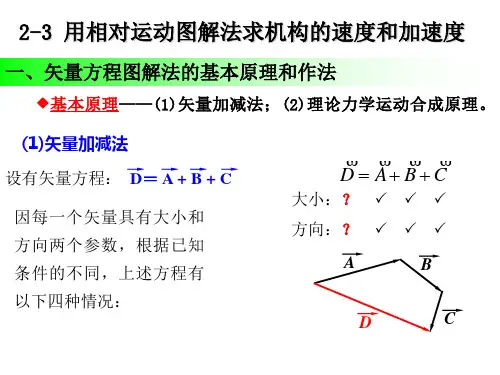
矢量方程图解法作速度加速度分析
- 格式:pdf
- 大小:189.63 KB
- 文档页数:7
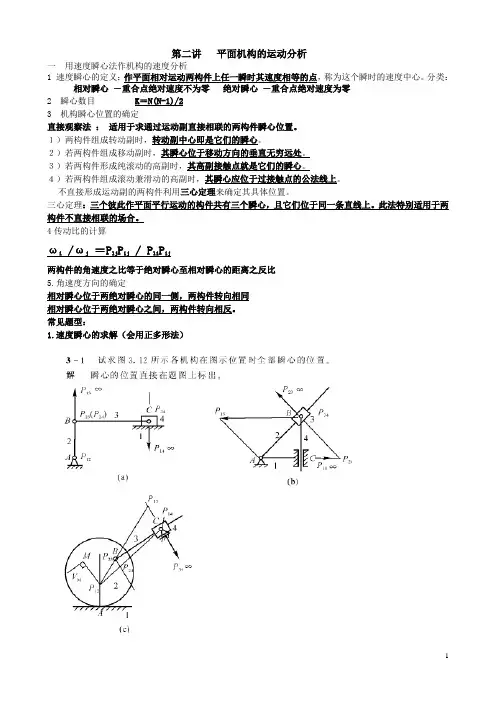
第二讲平面机构的运动分析一用速度瞬心法作机构的速度分析1 速度瞬心的定义:作平面相对运动两构件上任一瞬时其速度相等的点,称为这个瞬时的速度中心。
分类:相对瞬心-重合点绝对速度不为零绝对瞬心-重合点绝对速度为零2 瞬心数目 K=N(N-1)/23 机构瞬心位置的确定直接观察法:适用于求通过运动副直接相联的两构件瞬心位置。
1)两构件组成转动副时,转动副中心即是它们的瞬心。
2)若两构件组成移动副时,其瞬心位于移动方向的垂直无穷远处。
3)若两构件形成纯滚动的高副时,其高副接触点就是它们的瞬心。
4)若两构件组成滚动兼滑动的高副时,其瞬心应位于过接触点的公法线上。
不直接形成运动副的两构件利用三心定理来确定其具体位置。
三心定理:三个彼此作平面平行运动的构件共有三个瞬心,且它们位于同一条直线上。
此法特别适用于两构件不直接相联的场合。
4传动比的计算ωi /ωj=P1j P ij / P1i P ij两构件的角速度之比等于绝对瞬心至相对瞬心的距离之反比5.角速度方向的确定相对瞬心位于两绝对瞬心的同一侧,两构件转向相同相对瞬心位于两绝对瞬心之间,两构件转向相反。
常见题型:1.速度瞬心的求解(会用正多形法)2利用速度瞬心求解速度。
ωi /ωj =P 1j P ij / P 1i P ij例题:在图示四杆机构中,AB l =60mm ,CD l =90mm ,AD l =BC l =120mm ,2ω=10rad/s ,试用瞬心法求: (1)当ϕ=45°时,点C 的速度C v;(2)当ϕ=165°时,构件3的BC 线上(或其延长线上)速度最小的一点E 的位置及其速度大小;(3)当C v =0时,ϕ角之值(有两个解)。
P 13C(a)解:以选定的比例尺0.005/l m mm μ=作机构运动简图如图3-2所示。
(1)定瞬心P 13的位置,求v c 。
131331 6.07rad /AP DP l l s ωω==30.547/c l v CD m s μω==(2)如图(b )所示,定出构件2的BC 线上速度最小的一点E 位置及速度的大小。
第一章绪论一、教学要求(1)明确本课程研究的对象和内容,及其在培养机械类高级工程技术人才全局中的地位、任务和作用。
(2)对机械原理学科的发展现状有所了解。
二、主要内容1.机械原理课程的研究对象机械原理(Theory of Machines and Mechanisms)是以机器和机构为研究对象,是一门研究机构和机器的运动设计和动力设计,以及机械运动方案设计的技术基础课。
机器的种类繁多,如内燃机、汽车、机床、缝纫机、机器人、包装机等,它们的组成、功用、性能和运动特点各不相同。
机械原理是研究机器的共性理论,必须对机器进行概括和抽象内燃机与机械手的构造、用途和性能虽不相同,但是从它们的组成、运动确定性及功能关系看,都具有一些共同特征:1)人为的实物(机件)的组合体。
2)组成它们的各部分之间都具有确定的相对运动。
3)能完成有用机械功或转换机械能。
机构是传递运动和动力的实物组合体。
最常见的机构有连杆机构、凸轮机构、齿轮机构、间歇运动机构、螺旋机构、开式链机构等。
它们的共同特征是:(1)人为的实物(机件)的组合体。
(2)组成它们的各部分之间都具有确定的相对运动。
2.机械原理课程的研究内容1、机构的分析1)机构的结构分析(机构的组成、机构简图、机构确定运动条件等);2)机构的运动分析(机构的各构件的位移、速度和加速度分析等);3)机构的动力学分析(机构的受力、效率、及在外力作用下机构的真实运动规律等);2、机构的综合(设计):创新的过程1)常用机构的设计与分析(连杆机构、凸轮机构、齿轮机构、常用间歇机构等);2)传动系统设计(选用、组装、协调机构)通过对机械原理课程的学习,应掌握对已有的机械进行结构、运动和动力分析的方法,以及根据运动和动力性能方面的设计要求设计新机械的途径和方法。
3 机械原理课程的地位和作用机械原理是以高等数学、物理学及理论力学等基础课程为基础的,研究各种机械所具有的共性问题;它又为以后学习机械设计和有关机械工程专业课程以及掌握新的科学技术成就打好工程技术的理论基础。