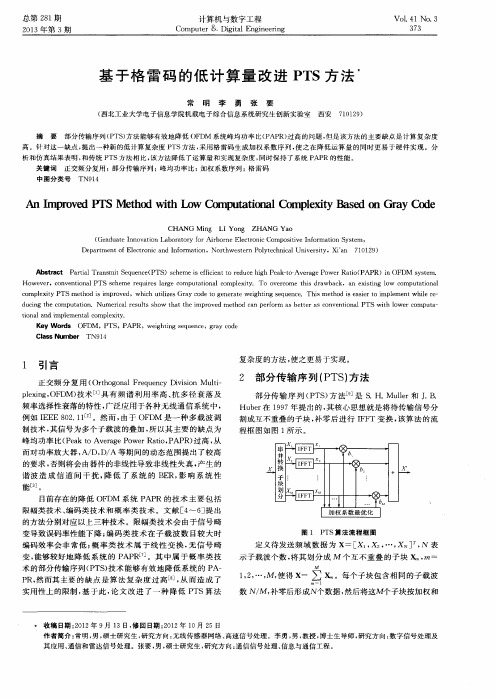
PTS算法框图
- 格式:vsd
- 大小:67.00 KB
- 文档页数:1

TLD目标跟踪算法一、算法的背景TLD(Tracking-Learning-Detection)是英国萨里大学的一个捷克籍博士生Zdenek出的一种新的单目标长时间(long term tracking)跟踪算法。
该算法与传统跟踪算法的显著区别在于将传统的跟踪算法和传统的检测算法相结合来解决被跟踪目标在被跟踪过程中发生的形变、部分遮挡等问题。
同时,通过一种改进的在线学习机制不断更新跟踪模块的“显著特征点”和检测模块的目标模型及相关参数,从而使得跟踪效果更加稳定、鲁棒、可靠。
对于长时间跟踪而言,一个关键的问题是:当目标重新出现在相机视野中时,系统应该能重新检测到它,并开始重新跟踪。
但是,长时间跟踪过程中,被跟踪目标将不可避免的发生形状变化、光照条件变化、尺度变化、遮挡等情况。
传统的跟踪算法,前端需要跟检测模块相互配合,当检测到被跟踪目标之后,就开始进入跟踪模块,而此后,检测模块就不会介入到跟踪过程中。
但这种方法有一个致命的缺陷:即,当被跟踪目标存在形状变化或遮挡时,跟踪就很容易失败;因此,对于长时间跟踪,或者被跟踪目标存在形状变化情况下的跟踪,很多人采用检测的方法来代替跟踪。
该方法虽然在某些情况下可以改进跟踪效果,但它需要一个离线的学习过程。
即:在检测之前,需要挑选大量的被跟踪目标的样本来进行学习和训练。
这也就意味着,训练样本要涵盖被跟踪目标可能发生的各种形变和各种尺度、姿态变化和光照变化的情况。
换言之,利用检测的方法来达到长时间跟踪的目的,对于训练样本的选择至关重要,否则,跟踪的鲁棒性就难以保证。
考虑到单纯的跟踪或者单纯的检测算法都无法在长时间跟踪过程中达到理想的效果,所以,TLD方法就考虑将两者予以结合,并加入一种改进的在线学习机制,从而使得整体的目标跟踪更加稳定、有效。
简单来说,TLD算法由三部分组成:跟踪模块、检测模块、学习模块;如下图所示其运行机制为:检测模块和跟踪模块互补干涉的并行进行处理。

ACO-OFDM系统中抑制PAPR性能的PTS改进算法李超;静永健【摘要】非对称限幅光正交频分复用(ACO-OFDM)系统中基于传统部分传输序列(PTS)的峰均比(PAPR)抑制算法存在复杂度过高,需要传送边带信息的问题。
在优化后的OFDM符号中直接插入边带信息会导致PAPR再升,带来传输速率损失。
针对上述不足,提出一种基于阈值迭代的PTS改进算法。
在搜索最优相位因子时,当PAPR小于给定阈值时,停止迭代降低计算复杂度。
仿真结果表明,和传统PTS算法相比,PAPR抑制效果更好,复杂度更低,能在不降低传输速率的情形下同时传输边带信息。
%In the traditional peak-to-average power ratio (PAPR)reduction algorithm based on partial transmit sequence (PTS), computational complexity is prohibitive and side information needs to be transmitted for asymmetrically clipped optical-orthogonal frequency division multiplexing (ACO-OFDM)system.The PAPR may be raised again when the side information is inserted di-rectly into the optimized ACO-OFDMsignal,which will decrease the data rate.Aiming at the above problems,an improved PTS algorithm based on threshold was proposed.This algorithm was terminated when the obtained PAPR was less than the given threshold at each process of searching the optimal phase factors to reduce complexity.Simulation results show that the proposed algorithm outperforms the traditional PTS method with lower complexity,and can achieve the same data rate while transmitting side information simultaneously.【期刊名称】《计算机工程与设计》【年(卷),期】2016(037)011【总页数】5页(P2893-2897)【关键词】可见光通信;非对称光正交频分复用;峰均比;部分传输序列;边带信息【作者】李超;静永健【作者单位】内蒙古信源信息技术有限公司,内蒙古呼和浩特 010000;内蒙古农业大学信息与网络中心,内蒙古呼和浩特 010018【正文语种】中文【中图分类】TP911.23常见的基于正交频分复用(orthogonal frequency division multiplexing,OFDM)技术的可见光通信(visible light communication,VLC)方式主要有直流偏置光正交频分复用(direct current biased optical OFDM,DCO-OFDM)和非对称限幅正交频分复用系统(asymmetrically clipped optical OFDM,ACO-OFDM)两种[1-6]。

计算视频播放的时间(pts)在解码视频流的时候对每⼀个视频帧都会有⼀个时间戳pts(显⽰时间戳),得到这个pts的值,并记下最开始的⼀个pts值(pts_00),以后画⾯显⽰的时间就可以⽤当前播放的帧的时间戳(pts_now -pts_00)/90000获得了,单位是秒,⾄于为什么是除以90000,这个问题还不清楚,我会继续跟踪下去,哈哈A: RFC3984 规定采⽤ 90000 Hz 的时钟,因此如果编码帧频是 30,那么时间戳间隔就该是 90000 / 30 = 3000,根据抓包来看,似乎时间戳间隔的确是 3000。
时间戳的间隔不固定,⽐如有的时间戳间隔是 2990 有的是 3002,会导致解析出来的视频快播的效果么参考⽹页:问题是这样的⽤⼀个 VLC(流媒体客户端) 去请求流媒体服务器上的数据,但是获得的数据播放速度明显快于1倍速,⼤概是 timestamp 不对,不知道是服务器的错误,还是客户端解码时出错,总感觉服务器那边有问题,由于服务器端是客户端提供的,客户说是我们的问题,我还不知道如何证明是谁的错。
A:RFC3984 规定采⽤ 90000 Hz 的时钟,因此如果编码帧频是 30,那么时间戳间隔就该是 90000 / 30 = 3000,根据抓包来看,似乎时间戳间隔的确是 3000。
时间戳的间隔不固定,⽐如有的时间戳间隔是 2990 有的是 3002,会导致解析出来的视频快播的效果么Q:各位⼤侠好:我现在正在开发视频实时流播放,简单的过程如下:采集视频流 -> 视频流转换为Sorenson H.263编码格式 -> 把编码的实时流通过RTMP协议发送 -> flash客户端进⾏播放。
现在我的时间戳颗粒是这样⽣成的:第⼀帧的时间戳为0;第⼆帧的时间戳的算法为:第⼀个字符编码的当前时间 - 上⼀帧第⼀个字符编码的当前时间根据这个时间颗粒的算法,我在flash客户端播放就会产⽣延时。

基于智能优化的OFDM信号峰均比降低算法作者:鄂那林高静来源:《科技视界》 2013年第4期鄂那林1 高静2(1.东北大学秦皇岛分校计算机与通信工程学院信息科学与工程学院,河北秦皇岛066004;2.东北大学秦皇岛分校控制与工程学院,河北秦皇岛 066004)【摘要】高峰均功率比(PAPR)信号是正交频分复用(OFDM)技术实用化的主要障碍,部分传输序列(PTS)算法是解决该问题的有效方法,但是对相位因子的穷举搜索导致计算复杂度极高。
针对该问题,将PTS算法转化为全局优化问题,提出基于智能优化方法的解决思路,引入模拟退火优化、粒子群优化等方法搜索最优相位序列,得到具有最小峰均比的信号,显著降低了算法的计算复杂度。
【关键词】正交频分复用;峰均功率比;部分传输序列;模拟退火0 引言多载波通信技术具有高效的频谱利用率和良好的抗多径衰落性能,是一种适用于无线环境下高速数据传输的技术。
目前,以正交频分复用(Orthogonal Frequency Division Multiplexing, OFDM)为代表的多载波技术已经成功应用于智能导航、卫星通信、数字视频广播、无线接入网和电力线通信等领域,是下一代移动通信系统颇具竞争力的关键技术。
但是,OFDM 系统存在高峰均功率比(PAPR)的问题,当具有高峰均比的信号通过功率放大器时往往会产生非线性失真,从而严重影响OFDM系统的性能。
因此必须设法降低信号的峰均比[1-2]。
为了解决这一问题,近年来提出了许多有效的PAPR降低方法,主要有:(1)限幅类方法[3],该类方法引入了非线性失真,导致系统的误码率性能下降;(2)编码类方法[4],该类方法的基本思想是将原来的信息码字映射到PAPR较小的序列来进行传输,从而避开可能会使OFDM信号出现峰值的码字,编码技术的复杂度非常高,而且会使信息速率大大降低,只适用于子载波数目较小的情况;(3)概率类方法[5],该类方法则着眼于降低OFDM信号峰值出现的概率,可有效地降低信号的PAPR值,而且不会使信号产生畸变。

pid控制原理PID控制概述1.PID控制的原理和特点:在工程实践中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
PID控制器问世至今已有近70年历史,它以结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其他技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。
即当我们不完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,最合适用PID控制技术。
PID控制,实际中也有PI和PD控制。
PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。
二、控制算法2.1 控制器公式连续时间PID控制系统如下图所示。
图中D(s)为控制器。
在PID控制系统中,D(s)完成PID控制规律,称为PID控制器。
PID控制器是一种线性控制器,用输出量y(t)和给定量r(t)之间的误差时间函数e(t)=r(t)-y(t)的比例、积分、微分的线性组合,构成控制量u(t),称为比例(Proportional)、积分(Integrating)、微分(Differentiation)控制,简称PID控制。
实际应用中,可以根据受控对象的特性和控制的性能要求,灵活地采用不同的控制组合,构成:u(t),Ke(t)比例(P)控制器: (3-1)Pt1u(t),K[e(t),e(,)d,]比例+积分(PI)控制器: (3-2),0TI比例+积分+微分(PID)控制器:tdet1() (3-3)utKetedT(),[(),(,),,]PD,0TdtI式中,K——比例放大系数;T——积分时间;T——微分时间 pID2.2 位置式PID控制算法:在电子数字计算机直接数字控制系统中,PID控制器是通过计算机PID控制算法程序实现的。
计算机直接数字控制系统大多数是采样-数据控制系统。
PTS PCR DTS 详解MPEG-2 TS/PS同步原理2010-08-11 19:47一、引言MPEG-2系统用于视音频同步以及系统时钟恢复的时间标签分别在ES,PES和TS这3个层次中。
在ES层,与同步有关的主要是视频缓冲验证VBV(Video Buffer Verifier),用以防止解码器的缓冲器出现上溢或者下溢;在PES层,主要是在PES头信息里出现的显示时间标签PTS(Presentation Time Stamp)和解码时间标签DTS(Decoding Time Stamp);在TS层中,TS头信息包含了节目时钟参考PCR(Program Clock Reference),用于恢复出与编码端一致的系统时序时钟STC(System Time Clock)。
在节目流PS包头中加入SCR,它的作用与PCR域相似。
标准规定在原始音频和视频流中,PTS的间隔不能超过0.7s,而出现在TS包头的PCR 间隔不能超过0.1s。
我们知道,MPEG-2对视频的压缩产生I帧、P帧、B帧。
把帧顺序I1帧-P4帧-B2帧-B3帧-P7帧-B5帧-B6帧的编码ES,通过打包并在每个帧中插入PTS/DTS标志,变成PES。
在插入PTS/DTS标志时,由于在B帧PTS和DTS是相等的,所以无须在B帧多插入DTS(参见图1)。
而对于I帧和P帧,由于经过复用后数据包的顺序会发生变化,显示前一定要存储于视频解码器的从新排序缓存器中,经过从新排序后再显示,所以一定要同时插入PTS和DTS 作为从新排序的依据。
二、同步机制编码器中有一个系统时钟STC(其频率是27MHz),此时钟用来产生指示音视频的正确显示和解码的时间标签,同时可用来指示在采样过程中系统时钟本身的瞬时值。
指示音视频显示时间的时间标签称为显示时间标签(PTS),指示音视频的解码时间标签称为解码时间标签(DTS),指示系统时钟本身的瞬时值的时间标签称为节目参考时钟标签(PCR)。