定位误差计算法
- 格式:doc
- 大小:56.00 KB
- 文档页数:3
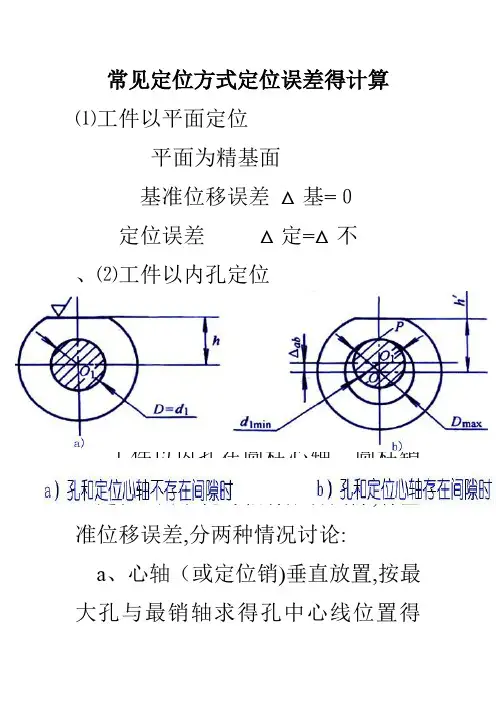
常见定位方式定位误差得计算⑴工件以平面定位平面为精基面基准位移误差△基=0定位误差△定=△不、⑵工件以内孔定位①工件孔与定位心轴(或销)采用间隙配合得定位误差计算△定= △不+ △基工件以内孔在圆柱心轴、圆柱销上定位。
由于孔与轴有配合间隙,有基准位移误差,分两种情况讨论:a、心轴(或定位销)垂直放置,按最大孔与最销轴求得孔中心线位置得变动量为:△基= δD+ δd+△min = △max =孔Dmax-轴dmin (最大间隙)b、心轴(或定位销)水平放置,孔中心线得最大变动量(在铅垂方向上)即为△定△基=OO'=1/2(δD+δd+△mi n)=△max/2或△基=(Dmax/2)-(dmin /2)=△max/2= (孔直径公差+轴直径公差) / 2②工件孔与定位心轴(销)过盈配合时(垂直或水平放置)时得定位误差此时,由于工件孔与心轴(销)为过盈配合,所以△基=0。
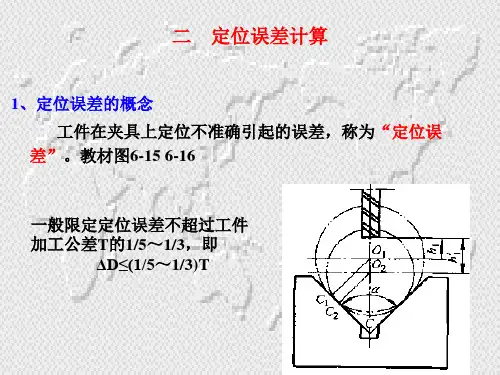
对H1尺寸:工序基准与定位基准重合,均为中心O,所以△不=0对H2尺寸:△不=δd/2⑶工件以外圆表面定位A、工件以外圆表面在V型块上定位由于V型块在水平方向有对中作用。
基准位移误差△基=0B.工件以外圆表面在定位套上定位定位误差得计算与工件以内孔在圆柱心轴、圆柱销上定位误差得计算相同。
⑷工件与"一面两孔"定位时得定位误差①“1”孔中心线在X,Y方向得最大位移为:△定(1x)=△定(1y)=δD1+δd 1+△1min=△1max(孔与销得最大间隙)②“2”孔中心线在X,Y方向得最大位移分别为:△定(2x)=△定(1x)+2δLd(两孔中心距公差)△定(2y)=δD2+δd2+△2min=△2max③两孔中心连线对两销中心连线得最大转角误差:△定(α)=2α=2tan-1[(△1max+△2max)/2L](其中L为两孔中心距)以上定位误差都属于基准位置误差,因为△不=0。
需要指出得就是定位误差一般总就是针对批量生产,并采用调整法加工得情况而言。


定位误差的计算方法:(1)合成法为基准不重合误差和基准位移误差之和; (2)极限位置法工序基准相对于刀具(机床)的两个极限位置间的距离就是定位误差; (3)微分法先用几何方法找出工序基准到定位元件上某一固定点的距离,然后对其全微分,用微小增量代替微分,将尺寸误差视为微小增量代入,就可以得到某一加工尺寸的定位误差。
注:基准不重合误差和基准位移误差它们在工序尺寸方向上的投影之和即为定位误差。
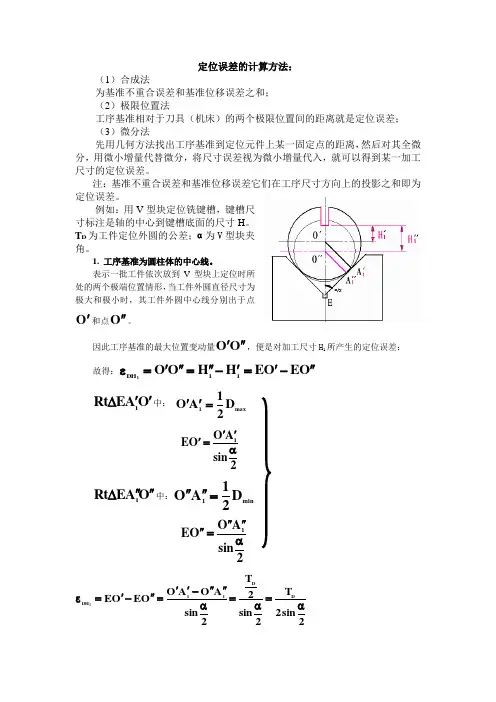
例如:用V 型块定位铣键槽,键槽尺寸标注是轴的中心到键槽底面的尺寸H 。
T D 为工件定位外圆的公差;α为V 型块夹角。
1. 工序基准为圆柱体的中心线。
表示一批工件依次放到V 型块上定位时所处的两个极端位置情形,当工件外圆直径尺寸为极大和极小时,其工件外圆中心线分别出于点O '和点O ''。
因此工序基准的最大位置变动量O O ''',便是对加工尺寸H 1所产生的定位误差: 故得:OE O E H H O O 11DH1''-'='-''='''=ε O A E Rt 1''∆中: max 1D 21A O ='' 2sin A O O E 1α''='O A E Rt 1''''∆中:min 1D 21A O ='''' 2sin A O O E 1α''''=''2sin 2T 2sin 2T 2sin A O A O O E O E D D11DH1α=α=α''''-''=''-'=ε2. 工序基准为圆柱体的下母线:工件加工表面以下母线C 为其工序基准时,工序基准的极限位置变动量C C '''就是加工尺寸H2所产生的定位误差。
定位误差计算方法定位误差是指实际测量值与真实值之间的差异,用于衡量一个位置测量结果的准确性。
在现代定位技术中,定位误差是一个关键指标,其精度直接影响定位系统的可靠性和有效性。
本文将介绍几种常见的定位误差计算方法。
一、绝对误差绝对误差是指实际测量值与真实值之间的差异,通常以绝对值表示。
绝对误差可以直观地描述一个定位系统的精度,但不适用于不同测量结果之间的比较。
二、平均误差平均误差是指多次测量结果的平均值与真实值之间的差异。
平均误差可以通过下式计算:平均误差=Σ(测量值-真实值)/测量次数平均误差可以用来衡量一个定位系统的整体准确性,但不能反映观测数据的离散程度。
三、均方根误差均方根误差是指实际测量值与真实值之间的差异的平方的平均值的平方根,通常用RMSE表示。
均方根误差是一种常用的测量指标,可以综合考虑测量结果的离散程度和偏差。
均方根误差可以通过下式计算:RMSE = sqrt(Σ(测量值 - 真实值)² / 测量次数)均方根误差越小,定位系统的精度越高。
四、标准差标准差是一种常见的测量结果离散程度的度量方法,它表示一组测量结果相对于均值的分散程度。
标准差可以通过下式计算:标准差= sqrt(Σ(测量值 - 均值)² / 测量次数)标准差越小,定位系统的精度越高。
五、置信椭圆置信椭圆是一种用于描述定位误差的图形表示方式,能够直观地展示定位系统的误差分布情况。
置信椭圆的形状和大小可以通过计算定位误差的均值和方差来确定。
通常情况下,置信椭圆的中心为测量结果的平均值,长轴和短轴的长度与测量结果的方差相关。
六、相关误差相关误差是指多个测量结果之间的相关性误差。
相关误差可以通过计算测量结果之间的协方差来确定。
相关误差可以反映定位系统中不同观测量之间的相互影响程度。
综上所述,定位误差计算方法多种多样,常见的包括绝对误差、平均误差、均方根误差、标准差和置信椭圆等。
不同的误差计算方法适用于不同的情况,可以综合使用来评估一个定位系统的准确性和可靠性。
定位误差的计算方法:(1)合成法为基准不重合误差和基准位移误差之和; (2)极限位置法工序基准相对于刀具(机床)的两个极限位置间的距离就是定位误差; (3)微分法先用几何方法找出工序基准到定位元件上某一固定点的距离,然后对其全微分,用微小增量代替微分,将尺寸误差视为微小增量代入,就可以得到某一加工尺寸的定位误差。
注:基准不重合误差和基准位移误差它们在工序尺寸方向上的投影之和即为定位误差。
例如:用V 型块定位铣键槽,键槽尺寸标注是轴的中心到键槽底面的尺寸H 。
T D 为工件定位外圆的公差;α为V 型块夹角。
1. 工序基准为圆柱体的中心线。
表示一批工件依次放到V 型块上定位时所处的两个极端位置情形,当工件外圆直径尺寸为极大和极小时,其工件外圆中心线分别出于点O '和点O ''。
因此工序基准的最大位置变动量O O ''',便是对加工尺寸H 1所产生的定位误差: 故得:OE O E H H O O 11DH1''-'='-''='''=ε O A E Rt 1''∆中: max 1D 21A O ='' 2sin A O O E 1α''='O A E Rt 1''''∆中:min 1D 21A O ='''' 2sin A O O E 1α''''=''2sin 2T 2sin 2T 2sin A O A O O E O E D D11DH1α=α=α''''-''=''-'=ε2. 工序基准为圆柱体的下母线:工件加工表面以下母线C 为其工序基准时,工序基准的极限位置变动量C C '''就是加工尺寸H2所产生的定位误差。
定位误差分析计算 1、工件以平面定位(1)如图所示工件图样,底面已经加工完成,以工件底面定位铣加工台阶面,保证尺寸20±0.15,其定位误差是多少?该种定位方法是否满足工序的要求?工序分析工序内容:铣平面工序要求:20±0.15(T=0.3) 工序基准:顶面 定位基准:底面基准不重合误差:△B=0.14×2=0.28(两基准间尺寸公差在加工尺寸方向上的投影) 基准位移误差:△W=0(精基准平面定位,基准位移误差可以不考虑) 定位误差:△D=△B+△W=0.28(工序基准不在定位基面上△D=△B+△W )定位质量评定:△D=0.28>(T/3=0.1) 不满足工序要求 解决办法:(1)定位方案不变,提高定位尺寸的精度,以减少△D 的数值;(2)改变定位方案。
(2)如图所示箱体类工件图样,底面和中间通孔已经加工完成,以工件底面定位铣加工平面,保证尺寸28±0.1,其定位误差是多少?该种定位方法是否满足工序的要求?工序分析工序内容:铣平面工序要求:28±0.1(T=0.2) 工序基准:孔轴线 定位基准:底面基准不重合误差:△B=0.1×2×cos45°=0.1414 (两基准间尺寸公差在加工尺寸方向上的投影) 基准位移误差:△W=0(精基准平面定位,基准位移误差可以不考虑) 定位误差:△D=△B+△W=0.1414(工序基准不在定位基面上△D=△B+△W )定位质量评定:△D=0.1414>(T/3=0.0667) 不满足工序要求 解决办法:(1)定位方案不变,提高定位尺寸的精度,以减少△D 的数值;(2)改变定位方案。
(3)下图所示工件,A 、B 面已由前道工序加工完成。
本铣槽工序要求确保尺寸50±0.05mm ,宽度30±0.042mm 由铣刀尺寸保证,试检验本方案的定位精度是否满足加工要求。
若不能满足加工要求,可采用什么方案定位?工序分析工序内容:铣槽工序要求:50±0.05mm (T=0.1mm) 工序基准:B 面 定位基准:左端面 基准不重合误差:△B=0.065×2+0.055×2=0.24mm (两基准间尺寸公差在加工尺寸方向上的投影) 基准位移误差:△W=0(精基准平面定位,基准位移误差可以不考虑) 定位误差:△D=△B+△W=0.24mm(工序基准不在定位基面上△D=△B+△W )定位质量评定:△D=0.24>(T/3=0.033) 不满足工序要求(4)如下图所示,工件镗孔加工图样,孔1和孔2均已加工完成,以工件底面A 为基准镗削孔3,要求保证尺寸(15±0.055)mm ,试检验f 该方案的定位精度。
定位误差计算方法皇甫彦卿(杭州电子科技大学信息工程学院,浙江杭州310018)摘要:分析了定位误差产生的原因和定位误差的本质,并结合具体的实例,对定位误差的计算提出了三种方法:几何法、微分法、组合法,并且为正确选择计算方法提供了依据。
关键词:定位误差;几何法;微分法;组合法Position error calculation methodAbstract:To analyze the causes of the positioning error and the nature of the positioning error, and combined with concrete examples, three methods are put forward for the calculation of position error: geometric method, differential method, group legal, and provide the basis for correct selection of calculation method.Key words: positioning error; Geometry method; Differentiation; Set of legal1 引言定位误差分析与计算,是机床夹具设计课程中的重点和难点。
在机械加工中,能否保证工件的加工要求,取决于工件与刀具间的相互位置。
而引起相互位置产生误差的因素有四个,定位误差就是重要因素之一(定位误差一般允许占工序公差的三分之一至五分之一)。
定位误差分析与计算目的是为了对定位方案进行论证,发现问题并及时解决。
2 工件定位误差2.1定位误差计算的概念按照六点定位原理,可以设计和检查工件在夹具上的正确位置,但能否满足工件对工序加工精度的要求,则取决于刀具与工件之间正确的相互位置,而影响这个正确位置关系的因素很多,如夹具在机床上的装夹误差、工件在夹具中的定位误差和夹紧误差、机床的调整误差、工艺系统的弹性变形和热变形误差、机床和刀具的制造误差及磨损误差等。
DW ∆表示定位误差
JW ∆表示基准位置误差
JB ∆表示基准不重和误差
定位误差分析方法
步骤1建立坐标系分成x 和y 、z 方向,分析所求尺寸定位误差所在方向。
步骤2分别求基准位置误差和基准不重和误差。
基准位置误差有两方面的误差:1工件的定位表面误差2夹具的定位元件制造误差。
基准不重和误差(基准不同所造成的误差)。
步骤3把所求误差分别投影在x 和y 方向(一般只有两个方向)可求出所求尺寸定位误差。
例题1、已知d1=Φ2500210-.,d2=
Φ4000250
-.,两外圆同轴度Φ0.02,V 型块夹角α=90°,试计算:
分析:1、建立坐标系x 和y ,铣键槽的尺寸的定位误差在y 方向上。
2、分析基准位置误差:(1)工件的定位表面误差∆jw =
2sin
21
α
d ∆=
45sin 2021
.0⨯≈0.015所在方向为y 方向,x 方向可不求(同学们自己思考为什么不求)。
(2)夹具的定位元件制造误差(本题无误差)。
3、基准不重和误差:∆jb =0.025+0.02=0.045方向为y 方向上,有两部分组成,0.025为d2造成形状误差,0.02为位置误差。
(1)铣键槽时的定位误差。
(2)若键槽深度要求A=34.8-017
0.,此定位方案可行否?
解:(1)∆jb =0.025+0.02=0.045
∆jw =
2sin
21
α
d ∆= 45sin 2021
.0⨯≈0.015
∆dw =∆jb +∆jw =0.045+0.015=0.060
(2)3工∆=317
0.〈∆dw =0.06
故不能满足加工要求,此方案不可行.
2、如下图所示零件的定位方案,求铣A 、B 两平面时L1、L2、L
3、L4的定位误差δL1、δL2、δL3、δL4?
解
:
TD jb jy jb L 2
101=+∆=∆+∆=δ
2=∆+∆=jy jb L δ
TD
TD jy jb L =+=∆+∆=03δ
4=∆+∆=jy jb L δ
3、某一发动机为了满足其工作性能的需要,活塞销与连杆小头孔的配合允许最大间隙为0.0055mm ,最小间隙为0.0005mm ,按此配合要求,则活塞销的外径
尺寸将为Φ250012500100--..,连杆小头孔的孔径尺寸为Φ250009500070--..,这样高的精度,目前虽
可达到,但生产率低,且不经济,故将公差放大4倍,采用分组装配以达到其要
求,试求各组的公差及其偏差分布。