定位误差计算方法
- 格式:doc
- 大小:142.00 KB
- 文档页数:5

(3)定位误差的计算由于定位误差ΔD是由基准不重合误差和基准位移误差组合而成的,因此在计算定位误差时,先分别算出Δ B和ΔY ,然后将两者组合而得ΔD。
组合时可有如下情况。
1)Δ Y ≠ 0,Δ B=O时Δ D= Δ B (4.8)2)ΔY =O,Δ B ≠ O时Δ D= Δ Y (4.9)3)Δ Y ≠ 0, Δ B ≠ O时如果工序基准不在定位基面上Δ D=Δ y + Δ B (4.10)如果工序基准在定位基面上Δ D=Δ y ±Δ B (4.11)“ + ” ,“—” 的判别方法为:①设定位基准是理想状态,当定位基面上尺寸由最大实体尺寸变为最小实体尺寸 (或由小变大)时,判断工序基准相对于定位基准的变动方向。
②② 设工序基准是理想状态,当定位基面上尺寸由最大实体尺寸变为最小实体尺寸 (或由小变大)时,判断定位基准相对其规定位置的变动方向。
③③ 若两者变动方向相同即取“ + ” ,两者变动方向相反即取“—”。
-、定位误差及其组成图9-21a图9-21 工件在V 形块上的定位误差分析工序基准和定位基准不重合而引起的基准不重合误差,以表示由于定位基准和定位元件本身的制造不准确而引起的定位基准位移误差,以表示。
定位误差是这两部分的矢量和。
二、定位误差分析计算(一)工件以外圆在v形块上定位时定位误差计算如图9-16a所示的铣键槽工序,工件在v 形块上定位,定位基准为圆柱轴心线。
如果忽略v形块的制造误差,则定位基准在垂直方向上的基准位移误差(9-3)对于9-16中的三种尺寸标注,下面分别计算其定位误差。
当尺寸标注为B1时,工序基准和定位基准重合,故基准不重合误差ΔB=0。
所以B1尺寸的定位误差为(9-4)当尺寸标注为B2时,工序基准为上母线。
此时存在基准不重合误差所以△D应为△B与Δy的矢量和。
由于当工件轴径由最大变到最小时,和Δy都是向下变化的,所以,它们的矢量和应是相加。
故(9-5)当尺寸标注为B3时,工序基准为下母线。
4.4 定位误差分析与计算在机械加工过程中,使用夹具的目的是为保证工件的加工精度。
那么,在设计定位方案时,工件除了正确地选择定位基准和定位元件之外,还应使选择的定位方式必须能满足工件加工精度要求。
因此,需要对定位方式所产生的定位误差进行定量地分析与计算,以确定所选择的定位方式是否合理。
4.4.1 定位误差产生的原因和计算造成定位误差Δ D的原因可分为性质不同的两个部分:一是由于基准不重合而产生的误差,称为基准不重合误差Δ B;二是由于定位副制造误差,而引起定位基准的位移,称为基准位移误差Δ Y。
当定位误差Δ D≤1/3δK(δK为本工序要求保证的工序尺寸的公差)时,一般认为选定的定位方式可行。
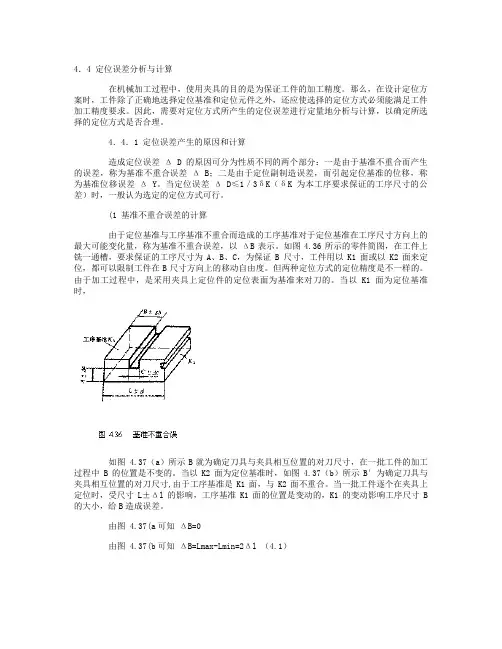
(1 基准不重合误差的计算由于定位基准与工序基准不重合而造成的工序基准对于定位基准在工序尺寸方向上的最大可能变化量,称为基准不重合误差,以ΔB表示。
如图4.36所示的零件简图,在工件上铣一通槽,要求保证的工序尺寸为A、B、C,为保证B尺寸,工件用以K1面或以K2面来定位,都可以限制工件在B尺寸方向上的移动自由度。
但两种定位方式的定位精度是不一样的。
由于加工过程中,是采用夹具上定位件的定位表面为基准来对刀的。
当以K1面为定位基准时,如图 4.37(a)所示B就为确定刀具与夹具相互位置的对刀尺寸,在一批工件的加工过程中 B的位置是不变的。
当以K2面为定位基准时,如图4.37(b)所示B′为确定刀具与夹具相互位置的对刀尺寸,由于工序基准是K1面,与K2面不重合。
当一批工件逐个在夹具上定位时,受尺寸L±Δl的影响,工序基准K1面的位置是变动的,K1的变动影响工序尺寸B 的大小,给B造成误差。
由图 4.37(a可知ΔB=0由图 4.37(b可知ΔB=Lmax-Lmin=2Δl (4.1)当工序基准的变动方向与工序尺寸方向有一夹角时,基准不重合误差等于定位基准与工序基准间距离尺寸公差在工序尺寸方向上的投影,即Δ B= (Smax-Smincos β β是基准不重合误差变化方向与工序尺寸方向上夹角( 2)基准位移误差和计算由于定位副的制造误差而造成定位基准对其规定位置的最大可能变动位移,称为基准位移误差,用ΔY 来表示。

定位误差分析与计算一、基本概念定位误差分析是针对某一个工序的工序尺寸而言的,只要该工序尺寸不因定位而产生误差,那么就认为该工序尺寸的定位误差是零。
至于该工序尺寸在加工过程中产生的误差,则不属于定位误差的研究范畴。
所以,不应将定位误差与加工过程误差以及其它误差混为一谈。
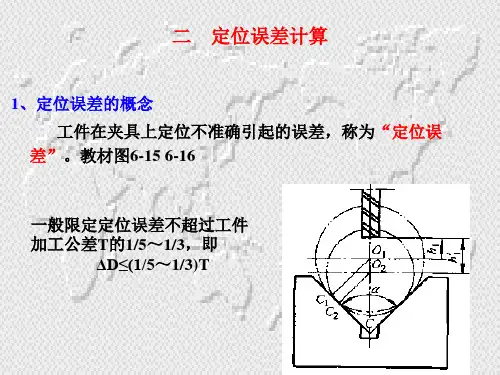
1.定位误差△D(△dw):工件在夹具上(或机床上)定位不准确而引起的加工误差称之为定位误差。
其大小等于按调整法加工一批工件而定位时工序尺寸的最大变动量。
定位误差来源于两个方面:基准不重合误差和基准位移误差。
2.基准不重合误差△B(△jb):因工序基准与定位基准不重合(原因),用调整法加工一批工件时(条件),引起工序基准相对定位基准在工序尺寸方向上的最大变动量 (结果),称为基准不重合误差。
若把工序基准与定位基准之间的联系尺寸(基本尺寸)称之为“定位尺寸”,则△B就是定位尺寸的公差在工序尺寸方向上的投影(或者说定位尺寸的最大变动量在工序尺寸方向上的投影)。
注意:基准不重合误差中的工序基准和定位基准都是针对工件而言的,与定位元件无关;3.基准位移误差△Y(△db):因定位副制造不准确(原因),用调整法加工一批工件时(条件),引起工序基准在工序尺寸方向上的最大变动量(结果),称为基准位移误差。
(或者说工序基准位置的最大变动量在工序尺寸方向上的投影)。
基准位移误差可以划分为两类:工件定位表面制造不准确引起的基准位移误差和夹具定位元件表面制造不准确引起的基准位移误差。
注意:在基准位移误差计算中,工序基准的变动是因为定位基准的变动而引起的。
所以有学者认为:基准位移误差是指定位基准在工序尺寸方向上的最大变动量。
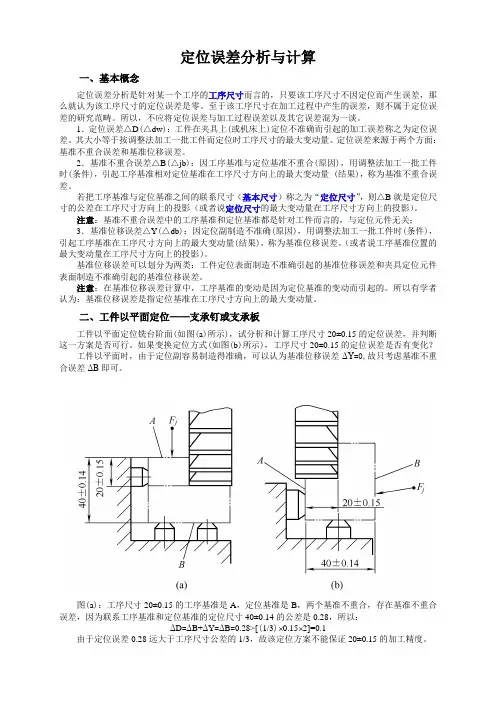
二、工件以平面定位——支承钉或支承板工件以平面定位铣台阶面(如图(a)所示),试分析和计算工序尺寸20±0.15的定位误差,并判断这一方案是否可行。
如果变换定位方式(如图(b)所示),工序尺寸20±0.15的定位误差是否有变化?工件以平面时,由于定位副容易制造得准确,可以认为基准位移误差ΔY=0,故只考虑基准不重合误差ΔB即可。

定位误差的分析计算为保证工件的加工精度,工件应有正确的定位,即除应限制工件必要的自由度使工件具有确定的位置外,还应使实施定位后所产生的误差在工件误差允许范围以内,实现工件安装时的定与准。
造成定位误差的原因有两个:一是由于定位基准与设计基准不重合,称基准不重合误差(定基误差)用△B表示;二是由于定位副制造误差而起定位基准的位移称为基准位移误差,用△Y表示。
(1)基准不重合误差的计算基准不重合误差因所选定位基准与工序基准不重合而引起,其值为两基准间的最大变化量(即两基面间公差),因此,计算时,可在确定认定位基准与工序基准的基础上,寻求两基面间的关系即可,具体分三步:①确定基准定位基准为该工序所选安装时定位的依据,并且一定在要求保证的工序尺寸方向上,作为已知条件在题目中说明或标注()于工序图;工序基准则为该工序用以表达加工表面(粗实线)位置尺寸的基准。
②基准是否重合经确认的定位基准与工序基准若为同一表面,则基准不重合误差△B=0;若不重合则需进行计算。
③基准不重合时的误差计算基准不重合误差为两基面间的最大变量。
因此,两基面间若有直接尺寸标注,则尺寸公差即为△B;若无直接尺寸,而只有间接尺寸,则需利用尺寸间关系如尺寸链进行求解。
若定位基准变动方向与对应工序尺寸不在同一方向,则需两基面间距离公差投影于工序尺寸方向,即△B=δs cosβ式中δs为定位基准与工序基准间尺寸公差β为基准间尺寸与工序尺寸之夹角(2)基准位移误差的计算基准位移误差△Y因定位副制造误差而起,因此,当定位副结构不同产生的基准位移误差计算。
①工件以平面定位工件若以粗基准平面定位,定位面与限位面间不可能有很好的贴合,但该定位方案往往出现在加工开始或加工要求不高情况下,故此时的误差也就不必计算。
工件若以加工过的精基准平面定位,则定位面与限位面间会有良好的接触状态,定位基面的位置可看成是不动的。
因此,基准位移误差为零,即△Y=0。
②工件外圆在圆孔中定位工件在外圆定位时,其定位基准为轴的中心线,定位基面为外圆柱面。
定位误差一直是定位技术研究和应用中的重要问题,在定位误差的来源中,基准位移误差和基准不重合误差是很常见的,它们对定位结果的影响很大。
本文将从基准位移误差和基准不重合误差两个方面展开讨论,分析它们的含义、影响和解决方法。
一、基准位移误差的含义和影响1. 基准位移误差是指参与定位的不同测量参考点之间的位置偏移,它可以由测量仪器的精度、环境条件等因素引起。
2. 基准位移误差会导致最终定位结果的不准确,特别是在需要高精度定位的应用场景中,如无人驾驶、航空航天等领域,基准位移误差的影响更加显著。
3. 解决基准位移误差的关键在于选择和设置合适的基准点,采用高精度的测量设备,并对环境因素进行充分的考虑和调整。
二、基准不重合误差的含义和影响1. 基准不重合误差是指不同基准点之间的坐标系之间存在一定的错位和偏移,这种误差可能来源于测量手段、数据处理等环节。
2. 基准不重合误差会使定位系统的各个基准点之间的数据不一致,从而影响定位精度和可靠性。
3. 解决基准不重合误差的关键在于建立统一的坐标系,采用一致的数据处理方法和标定策略,确保各个基准点之间的一致性和准确性。
三、如何综合考虑和解决基准位移误差和基准不重合误差1. 首先要对定位应用的具体场景和精度要求有清晰的认识和把握,根据具体要求选择合适的基准点和测量手段。
2. 其次要充分考虑环境因素对定位精度的影响,对测量设备、数据处理方法等进行调整和优化。
3. 最后要建立完善的数据校准和纠正机制,定期对基准点进行维护和更新,确保定位系统的持续稳定和精准性。
结语基准位移误差和基准不重合误差是定位系统中普遍存在的问题,它们会直接影响到定位结果的准确性和可靠性。
针对这些误差,我们需要根据具体场景和要求,综合考虑和解决,采用合适的基准点选择、测量设备和数据处理方法,建立完善的定位系统,以满足不同领域对定位精度的要求。
基准位移误差和基准不重合误差是定位系统中非常关键的问题,对于需要高精度定位的应用场景,如航空航天、导航系统、地理信息系统等领域,这些误差的影响更加显著。
定位误差的计算方法:(1)合成法为基准不重合误差和基准位移误差之和; (2)极限位置法工序基准相对于刀具(机床)的两个极限位置间的距离就是定位误差; (3)微分法先用几何方法找出工序基准到定位元件上某一固定点的距离,然后对其全微分,用微小增量代替微分,将尺寸误差视为微小增量代入,就可以得到某一加工尺寸的定位误差。
注:基准不重合误差和基准位移误差它们在工序尺寸方向上的投影之和即为定位误差。
例如:用V 型块定位铣键槽,键槽尺寸标注是轴的中心到键槽底面的尺寸H 。
T D 为工件定位外圆的公差;α为V 型块夹角。
1. 工序基准为圆柱体的中心线。
表示一批工件依次放到V 型块上定位时所处的两个极端位置情形,当工件外圆直径尺寸为极大和极小时,其工件外圆中心线分别出于点O '和点O ''。
因此工序基准的最大位置变动量O O ''',便是对加工尺寸H 1所产生的定位误差: 故得:OE O E H H O O 11DH1''-'='-''='''=ε O A E Rt 1''∆中: max 1D 21A O ='' 2sin A O O E 1α''='O A E Rt 1''''∆中:min 1D 21A O ='''' 2sin A O O E 1α''''=''2sin 2T 2sin 2T 2sin A O A O O E O E D D11DH1α=α=α''''-''=''-'=ε2. 工序基准为圆柱体的下母线:工件加工表面以下母线C 为其工序基准时,工序基准的极限位置变动量C C '''就是加工尺寸H2所产生的定位误差。
定位误差的计算方法:(1)合成法为基准不重合误差和基准位移误差之和; (2)极限位置法工序基准相对于刀具(机床)的两个极限位置间的距离就是定位误差; (3)微分法先用几何方法找出工序基准到定位元件上某一固定点的距离,然后对其全微分,用微小增量代替微分,将尺寸误差视为微小增量代入,就可以得到某一加工尺寸的定位误差。
注:基准不重合误差和基准位移误差它们在工序尺寸方向上的投影之和即为定位误差。
例如:用V 型块定位铣键槽,键槽尺寸标注是轴的中心到键槽底面的尺寸H 。
T D 为工件定位外圆的公差;α为V 型块夹角。
1. 工序基准为圆柱体的中心线。
表示一批工件依次放到V 型块上定位时所处的两个极端位置情形,当工件外圆直径尺寸为极大和极小时,其工件外圆中心线分别出于点O '和点O ''。
因此工序基准的最大位置变动量O O ''',便是对加工尺寸H 1所产生的定位误差: 故得:OE O E H H O O 11DH1''-'='-''='''=ε O A E Rt 1''∆中: max 1D 21A O ='' 2sin A O O E 1α''='O A E Rt 1''''∆中:min 1D 21A O ='''' 2sin A O O E 1α''''=''2sin 2T 2sin 2T 2sin A O A O O E O E D D11DH1α=α=α''''-''=''-'=ε2. 工序基准为圆柱体的下母线:工件加工表面以下母线C 为其工序基准时,工序基准的极限位置变动量C C '''就是加工尺寸H2所产生的定位误差。
定位误差分析计算 1、工件以平面定位(1)如图所示工件图样,底面已经加工完成,以工件底面定位铣加工台阶面,保证尺寸20±0.15,其定位误差是多少?该种定位方法是否满足工序的要求?工序分析工序内容:铣平面工序要求:20±0.15(T=0.3) 工序基准:顶面 定位基准:底面基准不重合误差:△B=0.14×2=0.28(两基准间尺寸公差在加工尺寸方向上的投影) 基准位移误差:△W=0(精基准平面定位,基准位移误差可以不考虑) 定位误差:△D=△B+△W=0.28(工序基准不在定位基面上△D=△B+△W )定位质量评定:△D=0.28>(T/3=0.1) 不满足工序要求 解决办法:(1)定位方案不变,提高定位尺寸的精度,以减少△D 的数值;(2)改变定位方案。
(2)如图所示箱体类工件图样,底面和中间通孔已经加工完成,以工件底面定位铣加工平面,保证尺寸28±0.1,其定位误差是多少?该种定位方法是否满足工序的要求?工序分析工序内容:铣平面工序要求:28±0.1(T=0.2) 工序基准:孔轴线 定位基准:底面基准不重合误差:△B=0.1×2×cos45°=0.1414 (两基准间尺寸公差在加工尺寸方向上的投影) 基准位移误差:△W=0(精基准平面定位,基准位移误差可以不考虑) 定位误差:△D=△B+△W=0.1414(工序基准不在定位基面上△D=△B+△W )定位质量评定:△D=0.1414>(T/3=0.0667) 不满足工序要求 解决办法:(1)定位方案不变,提高定位尺寸的精度,以减少△D 的数值;(2)改变定位方案。
(3)下图所示工件,A 、B 面已由前道工序加工完成。
本铣槽工序要求确保尺寸50±0.05mm ,宽度30±0.042mm 由铣刀尺寸保证,试检验本方案的定位精度是否满足加工要求。
若不能满足加工要求,可采用什么方案定位?工序分析工序内容:铣槽工序要求:50±0.05mm (T=0.1mm) 工序基准:B 面 定位基准:左端面 基准不重合误差:△B=0.065×2+0.055×2=0.24mm (两基准间尺寸公差在加工尺寸方向上的投影) 基准位移误差:△W=0(精基准平面定位,基准位移误差可以不考虑) 定位误差:△D=△B+△W=0.24mm(工序基准不在定位基面上△D=△B+△W )定位质量评定:△D=0.24>(T/3=0.033) 不满足工序要求(4)如下图所示,工件镗孔加工图样,孔1和孔2均已加工完成,以工件底面A 为基准镗削孔3,要求保证尺寸(15±0.055)mm ,试检验f 该方案的定位精度。
定位误差计算方法皇甫彦卿(杭州电子科技大学信息工程学院,浙江杭州310018)摘要:分析了定位误差产生的原因和定位误差的本质,并结合具体的实例,对定位误差的计算提出了三种方法:几何法、微分法、组合法,并且为正确选择计算方法提供了依据。
关键词:定位误差;几何法;微分法;组合法Position error calculation methodAbstract:To analyze the causes of the positioning error and the nature of the positioning error, and combined with concrete examples, three methods are put forward for the calculation of position error: geometric method, differential method, group legal, and provide the basis for correct selection of calculation method.Key words: positioning error; Geometry method; Differentiation; Set of legal1 引言定位误差分析与计算,是机床夹具设计课程中的重点和难点。
在机械加工中,能否保证工件的加工要求,取决于工件与刀具间的相互位置。
而引起相互位置产生误差的因素有四个,定位误差就是重要因素之一(定位误差一般允许占工序公差的三分之一至五分之一)。
定位误差分析与计算目的是为了对定位方案进行论证,发现问题并及时解决。
2 工件定位误差2.1定位误差计算的概念按照六点定位原理,可以设计和检查工件在夹具上的正确位置,但能否满足工件对工序加工精度的要求,则取决于刀具与工件之间正确的相互位置,而影响这个正确位置关系的因素很多,如夹具在机床上的装夹误差、工件在夹具中的定位误差和夹紧误差、机床的调整误差、工艺系统的弹性变形和热变形误差、机床和刀具的制造误差及磨损误差等。
定位误差的计算方法:
(1)合成法
为基准不重合误差和基准位移误差之和; (2)极限位置法
工序基准相对于刀具(机床)的两个极限位置间的距离就是定位误差; (3)微分法
先用几何方法找出工序基准到定位元件上某一固定点的距离,然后对其全微分,用微小增量代替微分,将尺寸误差视为微小增量代入,就可以得到某一加工尺寸的定位误差。
注:基准不重合误差和基准位移误差它们在工序尺寸方向上的投影之和即为定位误差。
例如:用V 型块定位铣键槽,键槽尺寸标注是轴的中心到键槽底面的尺寸H 。
T D 为工件定位外圆的公差;α为V 型块夹角。
1. 工序基准为圆柱体的中心线。
表示一批工件依次放到V 型块上定位时所处的两个极端位置情形,当工件外圆直径尺寸为极大和极小时,其工件外圆中心线分别出于点
O '和点O ''。
因此工序基准的最大位置变动量O O ''',便是对加工尺寸
H 1所产生的定位误差:
故得:
O
E O E H H O O 11DH 1
''-'='-''='''=ε O A E Rt 1''∆中: max 1
D 2
1A O ='' 2
sin A O O E 1α''=
' O A E Rt 1''''∆中:min 1
D 2
1
A O ='''' 2
sin A O O E 1α''''=
'' 2
sin 2T 2sin 2T 2sin A O A O O E O E D D
11DH
1
α=α=α''''-''=''-'=ε 2. 工序基准为圆柱体的下母线:
工件加工表面以下母线C 为其工序基准时,工序基准的极限位置变动量
C C '''就是加工尺寸H2所产生的定位误差。
C
S C S C O O O H H 22DH 2
'-''=''-'''='-''=ε C O C O O O )
C O O S ()C O O S ('
'-''''+'''=''+'-'''+'=
而 2
sin
2T O O D α=
'''
min D 2
1C O =''''
max D 2
1C O =''
所以:
C O C O O O 2
DH ''-''''+'''=ε
)
12
sin
1(2T 2T 2sin 2T 2D D 2
sin
2T )D (21
)D (212sin 2T D D D max min D max min D
DH 2
-α=-α=-+
α=-+α=ε
3. 工序基准为上母线
如果键槽的位置尺寸采用上母线标注时,上母线K 的极限位置变动量为
K K ''',就是对加工尺寸H 3
所产生的定位误差。
)
12
sin 1(2
T 2
sin
2T 2
T 2
sin
2T 2D D 2
sin
2T )D (21
)D (21O O K O K O )O O K O (K O K O K O H H K K D D
D D min max D min max 33DH 3
+α=α+=α+
-=α+-='''+''''-''='''-''''-''='
'''-''=''-'='''=ε
在V 型块中定位时的定位误差:
另外一种解法:
V 型块是一种对中定位元件,当V 型块和工件外圆制作的非常精确时,这时外圆中心应在V 型块理论中心位置上,即两中心重合而无基准位移误差。
但是实际上对于一批工件而言外圆直径是有偏差的,当外圆直径从Dmax 到Dmin 时,虽然工件外圆中心始终在V 型块的对称中心平面内而不发生左右移动,即V 型块在垂直于对称平面的方向无基准位移误差Δjw =0,但是工件外圆中心在V 型块的对称平面内发生上下偏移,即造成基准位移误差。
2
sin
2T 2sin 2T 2sin A O A O O E O E D
D
11jw α=α=α''''-''=''-'=∆
式中 T D ——工件定位外圆的公差;
即为基准位移误差大小。
当工序尺寸的标注方法不同时还可能产生基准不重合误差,铣键槽分别以中心线,上母线和下母线为工序基准,其基准不重合误差分别为:
0)H (1bc =∆
2T )H (D
2bc =∆
2
T )H (D
3bc =∆
而定位误差为基准不重合误差和基准位移误差在加工尺寸方向上的代数和。
)H ()H (i jw i bc dw ∆±∆=∆
2
sin
2T )H ()H ()H (D 1jw 1bc 1dw α=
∆±∆=∆
)12
sin
1(2T 2sin 2T 2
T )H ()H ()H (D D
D
2jw 2bc 2dw +α=α+
=∆+∆=∆)
12
sin
1
(2T 2T 2sin 2T )H ()H ()H (D D D
3bc 3jw 3dw -α=-α=∆±∆=∆补充作业:
如图所示工件以外圆柱面在V 型块上定位,对内孔进行插键槽工序,
已知:外径d 为
mm 50003
.0-φ;
内径D 为
mm 3005
.00+φ
内外圆同轴度为0.02mm ,试计算用调整法加工这批工件时,工序尺寸H 的定位误差是多少?
解: 基
准
不
重
合
误
差
:
mm 025.02
05
.0c ==ε
基准位移误差: mm 021.02
90sin
203
.02sin 2T D
w
==α=ε 同轴度误差:
mm 02.0=∆同轴度
则,定位误差为:
mm 066.002.0021.0025.0W C D =++ε+ε+ε=ε=同轴度。