第二章 典型环节的数学模型(2-1)讲解
- 格式:ppt
- 大小:1.10 MB
- 文档页数:26
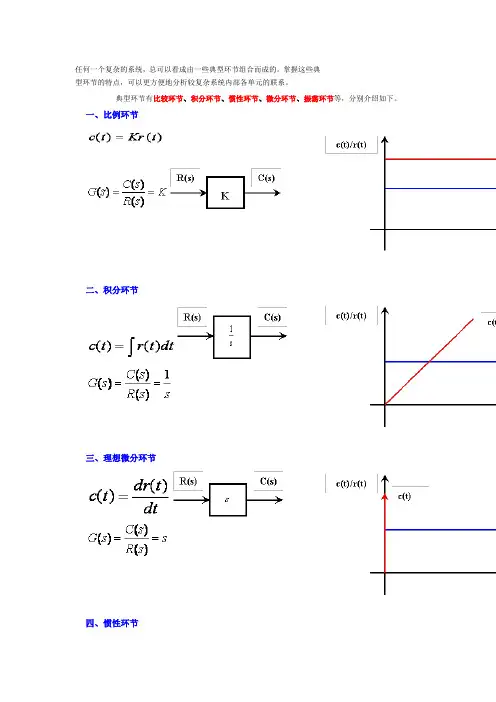
任何一个复杂的系统,总可以看成由一些典型环节组合而成的。
掌握这些典
型环节的特点,可以更方便地分析较复杂系统内部各单元的联系。
典型环节有比较环节、积分环节、惯性环节、微分环节、振荡环节等,分别介绍如下。
一、比例环节
二、积分环节
三、理想微分环节
四、惯性环节
五、振荡环节
特别注意:当0〈§〈1时称为振荡环节若§≥1认为是两个惯性环节
七、延迟环节(又称纯滞后环节)
τ0:纯延迟时间
在延迟时间很小的情况下,延迟环节可用一个小惯性环节来代替。