简谐振动模型
- 格式:doc
- 大小:626.50 KB
- 文档页数:8
简谐振动理论概述简谐振动是物理学中一种基本的振动形式,广泛应用于机械、电子、光学等领域。
本文将概述简谐振动的理论基础及相关特性。
一、简谐振动的定义与基本特性简谐振动是指在恢复力作用下,物体围绕平衡位置做往复振动的一种运动形式。
它具有以下几个基本特性:1. 平衡位置:简谐振动的平衡位置是物体受到恢复力时的位置,也是物体运动的稳定状态。
2. 往复运动:物体在简谐振动中以一定的频率围绕平衡位置做往复运动,即向远离平衡位置的方向运动,然后再回到平衡位置。
3. 振幅:振幅是简谐振动的最大偏离平衡位置的距离,它决定了振动的强度。
4. 周期与频率:简谐振动的周期是物体完成一次完整振动所需的时间,频率是单位时间内振动的次数。
它们之间存在着倒数关系,即周期等于频率的倒数。
二、简谐振动的数学表示简谐振动可以通过数学函数来描述。
其中,最常用的是正弦函数和余弦函数。
简谐振动的数学表示形式如下:x(t) = A * sin(ωt + φ)其中,x(t)表示时间t时物体离平衡位置的距离;A表示振幅;ω表示角频率,与振动的周期和频率有关;φ表示相位,描述振动的初始时刻。
三、简谐振动的力学模型简谐振动的力学模型通常可以使用弹簧振子来描述。
弹簧振子由弹簧和质点组成,在无阻尼情况下可以实现简谐振动。
根据胡克定律,弹簧振子的恢复力与质点的位移成正比,可以通过以下公式表示:F = -kx其中,F表示恢复力的大小;k表示弹簧的劲度系数;x表示质点相对平衡位置的位移。
四、简谐振动的能量在简谐振动中,系统的总能量保持不变,由动能和势能组成。
质点的动能和势能在振动过程中相互转换。
动能和势能可以通过以下公式表示:动能 K = 1/2 * m * v^2势能 U = 1/2 * k * x^2其中,m表示质点的质量;v表示质点的速度;k表示弹簧的劲度系数;x表示质点相对平衡位置的位移。
五、简谐振动的应用简谐振动在各个领域都有重要的应用。
以下是一些常见的应用场景:1. 机械振动:简谐振动广泛应用于机械系统中,如弹簧振子、钟摆等。

高中物理模型大全引言在高中物理学习中,模型是我们理解和解释自然现象的重要工具。
通过建立模型,我们可以更好地理解物理规律和现象,并预测未知情况下的结果。
本文将介绍一些高中物理学习中常用的模型,帮助同学们更好地掌握物理知识。
1.简谐振动模型简谐振动模型是描述振动现象的重要模型。
在简谐振动模型中,假设振动系统回复力与位移成正比,且方向相反。
例如弹簧振子、摆钟等都可以使用简谐振动模型进行分析和计算。
2.牛顿第二定律模型牛顿第二定律模型是描述物体运动的基本模型。
根据牛顿第二定律,物体的加速度与受到的合外力成正比,与物体的质量成反比。
这个模型被广泛应用于解决各种运动问题,如自由落体、斜抛运动等。
3.热传导模型热传导模型是描述热传导现象的模型。
在热传导模型中,假设热量从高温物体传递到低温物体,传递速率与温度差成正比,与材料的热导率和截面积成反比。
这个模型可以用于解释热传导过程和计算热传导速率。
4.光的折射模型光的折射模型是描述光线在介质中传播时发生折射现象的模型。
根据斯涅尔定律,入射角、折射角和介质折射率之间存在一定的关系。
这个模型被应用于解决各种光学问题,如光的折射、全反射等。
5.电路模型电路模型是描述电流和电压分布的模型。
通过欧姆定律、基尔霍夫定律等原理,我们可以建立电路模型来分析电路中的电流和电压变化。
这个模型被广泛应用于解决电路中的各种问题,如串联电路、并联电路等。
6.引力模型引力模型是描述物体之间引力相互作用的模型。
根据万有引力定律,两个物体之间的引力与它们的质量成正比,与它们之间的距离的平方成反比。
这个模型可以用于解释行星运动、地球引力等现象。
7.声音传播模型声音传播模型是描述声音在介质中传播的模型。
根据声波传播原理,声音的传播速度与介质的性质有关,一般来说,声速在固体中最大,在气体中最小。
这个模型可以应用于解释声音的传播和计算声音的传播速度。
8.磁场模型磁场模型是描述磁场分布和磁力作用的模型。
通过安培环路定理和洛伦兹力定律,我们可以建立磁场模型来分析磁场中的磁感应强度和磁力变化。
简谐振动与周期运动简谐振动是物理学中研究的重要概念之一,也是周期运动的一种特例。
在本文中,将详细介绍简谐振动的定义、特征以及相关的数学模型。
一、简谐振动的定义与特征简谐振动是指物体在某一平衡位置附近,沿着某一直线或者曲线做往复运动的一种物理现象。
其特征如下:1. 平衡位置:简谐振动的物体存在一个平衡位置,该位置为物体没有受到外力时的稳定位置。
2. 受力特征:简谐振动的物体受到一个恢复力的作用,该恢复力与物体的位移成正比,且方向相反。
3. 往复运动:简谐振动的物体在平衡位置周围作往复运动,即沿着某一直线或曲线来回振动。
二、简谐振动的数学模型在数学上,可以用简谐振动的数学模型来描述其运动规律。
经典的简谐振动模型为:x(t) = A * cos(ωt + φ)其中,x(t)表示物体的位移,A表示振幅,ω表示角频率,t表示时间,φ表示初相位。
基于上述模型,我们可以得出一系列关于简谐振动的重要结论:1. 振幅:振幅A表示物体运动的最大位移,它取决于外力的大小以及初始条件。
2. 频率和周期:频率f表示单位时间内振动的次数,周期T表示完成一个完整振动所需要的时间。
它们的关系为f = 1/T。
3. 角频率:角频率ω是频率f的量纲化表达,它与频率的关系为ω= 2πf。
4. 相位与初相位:相位φ描述物体的运动状态,初相位φ表示物体在t = 0时刻的相位。
三、简谐振动的应用与实例简谐振动在现实生活和工程应用中具有广泛的应用价值。
以下是几个简谐振动的实例:1. 钟摆:钟摆的摆动过程符合简谐振动的规律,其周期与摆长有关。
2. 弹簧振子:弹簧振子是简谐振动的典型例子,而弹簧振子的周期与弹簧劲度系数以及质量有关。
3. 电路振荡器:电路振荡器是电子技术中的重要组件,其原理是基于简谐振动的特性。
四、总结简谐振动作为周期运动的一种特例,在物理学中具有重要的地位和意义。
它的定义和特征以及数学模型都是我们深入理解振动运动的基础。
同时,简谐振动的应用广泛,涉及到多个领域,为我们的生活和科技发展带来了很多便利。
简谐振动的公式推导嘿,咱们来聊聊简谐振动的公式推导!话说在学习物理的道路上,简谐振动就像一个神秘的小怪兽,要想驯服它,就得搞清楚它的公式是怎么来的。
咱们先从最基础的说起,想象一下一个小球在弹簧上蹦跶,这就是一个简单的简谐振动模型。
那为啥它会这样有规律地动呢?咱们设小球的位移为 x ,回复力为 F 。
根据胡克定律,回复力 F 跟位移 x 成正比,方向相反,所以可以写成 F = -kx ,这里的 k 就是弹簧的劲度系数啦。
接下来,咱们引入加速度 a 。
根据牛顿第二定律 F = ma ,那小球的加速度 a 就等于 F / m ,把 F = -kx 代进去,就得到 a = -(k / m)x 。
咱们再深入一步,加速度是位移对时间的二阶导数。
假设位移 x 可以表示成x = A sin(ωt + φ) ,这里 A 是振幅,ω 是角频率,t 是时间,φ 是初相位。
对 x 求一阶导数,就得到速度v = ωA cos(ωt + φ) 。
再求一次导,就得到加速度 a = -ω²A sin(ωt + φ) 。
把 a = -ω²A sin(ωt + φ) 和 a = -(k / m)x = -(k / m)A sin(ωt + φ) 对比一下,就能得出ω² = k / m ,所以ω = √(k / m) 。
我还记得有一次给学生们讲这个的时候,有个小家伙特别较真,一直问我:“老师,这到底有啥用啊?”我就跟他们说:“你们想想荡秋千,要是不掌握这个规律,怎么能荡得又高又稳呢?”结果全班都哄堂大笑,可后来大家也都更认真地去理解这个公式推导了。
总之,搞清楚简谐振动的公式推导,能让我们更好地理解很多自然现象,比如钟摆的摆动、琴弦的振动等等。
这就是探索物理世界的乐趣所在呀!希望大家以后遇到类似的问题,都能像攻克这个小怪兽一样,轻松拿下!。

机械振动
需要特别注意的要点:
一.振动及描述振动的物理量:
1.位移x:由平衡位置指向振动质点所在位置的有向线段,是矢量,其最大值等于振幅。
无论质点从什么位置开始振动,其位移总是以平衡位置为初位置。
二.简谐振动的特征:
1.动力学特征:F=-kx
2.运动学特征:x、v、a均按正弦或者余弦规律发生周期性变化(v和a变化趋势相反)
3.能量特征:系统的机械能守恒,振幅A不变
三.简谐振动的两个典型模型-------弹簧振子与单摆
弹簧振子是一种忽略摩擦、弹簧质量的理想化的模型。
对弹簧振子来说,弹簧振子的劲度系数、振子的质量确定了,其振子的周期和频率也就确定了。
无论是在地球上、其他星球上,或者是在完全失重的人造卫星中,T和f均不变,完全由系统本身的性质决定。
高中物理力学44个模型物理力学是高中物理学习的一个重要组成部分,通过学习力学,我们可以了解物体运动的规律和力的作用。
在学习力学的过程中,模型是非常重要的工具,可以帮助我们更好地理解抽象的物理概念。
下面将介绍高中物理力学中的44个模型,帮助大家深入了解力学知识。
1.质点模型:假设物体的大小可以忽略不计,只考虑物体的质量和位置。
2.运动学模型:研究物体运动的基本规律,包括位移、速度、加速度等。
3.匀速直线运动模型:物体在力的作用下保持匀速直线运动。
4.变速直线运动模型:物体在力的作用下速度不断改变的直线运动。
5.抛体模型:研究物体抛出后在重力作用下的轨迹运动。
6.牛顿第一定律模型:物体静止或匀速直线运动状态保持不变的定律。
7.牛顿第二定律模型:物体的加速度与作用力成正比,与物体质量成反比的定律。
8.牛顿第三定律模型:任何两个物体间的相互作用力大小相等,但方向相反。
9.惯性系模型:描述物体的力学规律需要建立的参考系。
10.非惯性系模型:在非惯性系中描述物体的力学规律需要引入惯性力。
11.作图模型:通过绘制物体受力情况的示意图来帮助分析解题。
12.叠加原理模型:将多个力合成一个合力来简化分析。
13.平衡模型:研究物体所受力使合力为零的情况,包括静平衡和动平衡。
14.弹簧模型:弹簧的伸长或压缩与受力大小成正比的物理模型。
15.胡克定律模型:描述弹簧弹性力与伸长(压缩)长度成正比的定律。
16.重力模型:物体受重力作用下的运动规律,包括自由落体和斜抛运动。
17.动力学模型:研究物体受到的力对其运动状态的影响。
18.动能模型:物体由于运动而具有的能量。
19.势能模型:物体由于位置或形状而具有的能量。
20.机械能守恒模型:封闭系统机械能总量在没有非弹性碰撞的条件下保持不变。
21.动量模型:描述物体运动状态的物理量,是质量与速度的乘积。
22.动量守恒模型:封闭系统内动量总量在无外力作用下保持不变。
23.质心模型:多个物体的质心位置与各物体质量与位置的加权平均值。
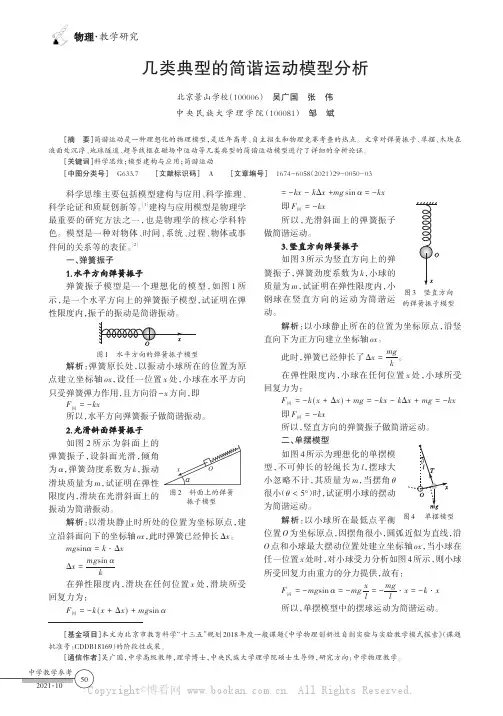
机械简谐运动的两种典型模型弹簧振子模型弹簧振子是机械简谐运动的经典模型之一,它是理解力学振动现象的基础。
弹簧振子的原理弹簧振子由一个质点和一个弹簧组成。
当质点不受外力作用时,由于弹簧的弹性力,质点会沿着与弹簧平行的轴线上做周期性的振动。
弹簧振子的运动方程对于一个弹簧振子,其运动方程可以表示为:m * a + k * x = 0其中,m是质点的质量,a是质点的加速度,k是弹簧的弹性系数,x是质点与平衡位置的位移。
弹簧振子的解析解弹簧振子的运动方程是一个二阶线性常微分方程,可以通过求解得到其解析解。
假设质点的初始位置为x0,初始速度为v0,则弹簧振子的解析解为:x(t) = A * cos(ωt + φ)其中,A是振幅(即位移的最大值),ω是角频率,φ是相位常数。
根据初始条件,可以得到:A = sqrt(x0^2 + (v0/ω)^2)φ = -arctan(v0/(ω*x0))弹簧振子的周期和频率弹簧振子的周期和频率与弹簧的弹性系数和质点的质量有关。
周期可以表示为:T = (2π) / ω频率可以表示为:f = 1 / T = ω / (2π)弹簧振子的应用弹簧振子的简单结构和运动规律使其在实际应用中具有广泛的用途。
例如:•音叉是一种利用弹簧振子的原理制造的乐器,用于产生特定频率的声音。
•汽车悬挂系统中常使用弹簧振子来减震,提高行车的平稳性。
•建筑工程中,利用弹簧振子的原理可以设计出隔震系统,有效减少地震对建筑物的影响。
单摆模型单摆是另一个常用的机械简谐运动模型,通过在重力场中运动,可以产生具有固定周期的振动。
单摆的原理单摆由一个质点和一个细长不可伸缩的线组成。
当质点在重力下,沿着线的垂直方向进行摆动时,可以产生简谐振动。
单摆的运动方程对于一个单摆,其运动方程可以表示为:m * g * sin(θ) = -m * l * θ''其中,m是质点的质量,g是重力加速度,l是单摆的长度,θ是质点与竖直方向的夹角,θ''是质点的角加速度。
摘要机械振动主要有简谐振动,阻尼振动,受迫振动三种。
对三种振动建立模型,列出振动方程,再对三种振动给定初始条件,就可以利用Matlab Simulink功能对三种振动进行仿真模拟,得出振动的位移,速度,加速度,动能,势能,机械能随时间的变化关系图像。
另外,我们对振动方程求解,得出振子位移关于时间的函数,再分别对其求一阶、二阶导数,就可以得出速度、加速度函数,再经过简单运算就可以得到动能、势能、机械能函数。
我们再通过分析函数来分析其图像,再对比仿真模拟出的图像,就可以确定我们的仿真研究方法的可信度。
关键词:简谐振动;阻尼振动;受迫振动;共振1引言——机械振动的仿真原理1.1 Matlab Simulink功能简述Simulink是基于Matlab的框图设计环境,可以用来对各种动态系统进行建模、分析和仿真,它的建模范围广泛,可以针对任何能用数学来描述的系统进行建模,例如航空航天动力学系统、卫星控制制导系统、通信系统、船舶及汽车等,其中包括了连续、离散,条件执行,事件驱动,单速率、多速率和混杂系统等。
Simulink提供了利用鼠标拖放的方法来建立系统框图模型的图形界面,而且还提供了丰富的功能块以及不同的专业模块集合,利用Simulink几乎可以做到不书写一行代码即完成整个动态系统的建模工作。
除此之外,Simulink还支持Stateflow,用来仿真事件驱动过程。
Simulink是从底层开发的一个完整的仿真环境和图形界面,是模块化了的编程工具,它把Matlab的许多功能都设计成一个个直观的功能模块,把需要的功能模块用连线连起来就可以实现需要的仿真功能了。
也可以根据自己的需要设计自己的功能模块,Simulink功能强大,界面友好,是一种很不错的仿真工具[1]。
1.2机械振动的物理模型物理学中的机械振动主要分为简谐振动、阻尼振动、受迫振动三种。
下面我们根据这三种类型的振动建立物理模型来分别研究。
1.2.1简谐振动的物理模型图1 弹簧振子做简谐振动物理实验模型如上图所示,弹簧振子在O 附近做简谐振动。
简谐振动原理与弹簧振子模型的深度剖析简谐振动是物体围绕平衡位置作周期性来回振动的现象。
在自然界和工程领域中,简谐振动是一种常见且重要的现象,而弹簧振子则是简谐振动的经典模型之一。
本文将深度剖析简谐振动的基本原理以及弹簧振子模型的相关内容。
简谐振动原理简谐振动有着许多重要的特点和原理,其中最基本的包括以下几点:1.平衡位置:简谐振动的平衡位置是物体在没有外力作用时停留的位置,也称为零位移位置。
2.恢复力:当物体离开平衡位置时,会有一个恢复力作用于物体,使其向平衡位置回归。
这个恢复力与物体偏离平衡位置的距离成正比。
3.振动频率:简谐振动的频率只与所受的恢复力和振动体的质量有关,与振动的起始位移大小无关。
4.振动幅度:振动的振幅是指物体从平衡位置最大位移的大小。
5.相位:相位表示振动的状态,通过相位可以描述振动的变化规律。
弹簧振子模型弹簧振子是简谐振动的一个典型模型,它由一个质点和一个弹簧组成。
在弹簧振子模型中,质点在弹簧的作用下作周期性的振动。
弹簧的劲度系数弹簧的劲度系数是描述弹簧硬度的物理量,表示单位长度或单位变形下的弹性力大小。
通常用符号k表示。
振动方程对于弹簧振子模型,其振动满足简谐振动的基本特点,可以根据牛顿第二定律得到其运动方程:$$ m\\frac{d^2x}{dt^2} + kx = 0 $$其中,m为质点的质量,x为质点的位移,t为时间。
振动频率和周期根据弹簧振子的振动方程,可以推导出弹簧振子的振动频率和周期:$$ f = \\frac{1}{2\\pi}\\sqrt{\\frac{k}{m}} $$$$ T = \\frac{1}{f} $$其中,f为振动频率,T为振动周期。
振动能量弹簧振子在振动过程中会周期性地转化弹性势能和动能。
其总能量可以表示为:$$ E = \\frac{1}{2}kA^2 = \\frac{1}{2}m\\omega^2A^2 $$其中,A为振幅,$\\omega$为角频率。
简谐振动与圆周运动投影原理1.振动的描述振动是物体在某一确定位置附近反复往返移动的物理现象。
简谐振动是最简单的一种理想化振动,其数学模型可表示为: x=Acos(wt+p)。
其中,A是振幅,w是角频率,t是时间,p是初相。
⒉圆周运动的基本概念圆周运动是物体沿着一个固定圆周或其切线方向的运动。
在圆周运动中,物体在任意时刻都占据圆周上的一个点,其位置可用极坐标表示为: r=r(t),0=wt+p0。
其中,r是半径,0是方位角,w是角速度,t是时间,p0是初相。
3.振动在直角坐标系中的表示简谐振动的位移、速度和加速度在直角坐标系中的表示分别为: X=Acos(wt+p),V=-wAcos(wt+p),a=-w2Acos(wt+p)。
4.圆周运动在极坐标系中的表示在极坐标系中,圆周运动的位移、速度和加速度分别表示为:r=Ocos(ut+p0),v=-wrOsin(wt+p0),a=w2rOcos(wt+p0)。
5.简谐振动的合成与分解简谐振动可以由两个或多个不同频率、振幅或相位的基本简谐振动的合成来产生。
简谐振动也可以通过傅立叶分析分解为多个不同频率的简谐振动。
6.圆周运动的合成与分解圆周运动可以由两个或多个不同角速度、半径或方位角的圆周运动的合成来产生。
圆周运动也可以通过相应的方式分解为多个不同角速度、半径或方位角的圆周运动。
7.投影原理的数学基础投影原理是指通过选择适当的投影面和投影方向,将三维空间中的点或线投影到二维平面上。
在数学中,投影原理用于将高维空间中的函数或向量投影到低维空间中,以简化问题。
8.振动与圆周运动的投影关系简谐振动和圆周运动都可以看作是时间和空间中的函数,它们都可以通过投影原理将三维空间中的轨迹投影到二维平面上。
具体地,对于简谐振动,可以通过投影原理将三维位移场投影到直角坐标系中的二维平面上;对于圆周运动,可以通过投影原理将三维轨迹场投影到极坐标系中的二维平面上。
9.应用举例:机械振动与电磁振荡的联系机械振动和电磁振荡在许多方面是相似的。
大学物理模型汇总
引言
大学物理是一门研究物质与能量相互作用的学科,其中有许多重要的物理模型可以帮助我们理解自然界的各种现象。
本文档汇总了几个常见的大学物理模型,旨在帮助学生更好地掌握这门学科。
1. 简谐振动模型
简谐振动是指一个系统在平衡位置附近以某个频率来回振动的现象。
这个模型可以用来描述弹簧振子、摆锤等一系列物理系统的运动。
2. 牛顿力学模型
牛顿力学是经典力学的基础,描述了物体运动的基本规律。
根据牛顿三定律,我们可以预测物体运动的轨迹、力的作用等。
3. 电磁场模型
电磁场模型描述了电荷和电磁波之间的相互作用。
它包括静电场和电流产生的磁场,可以帮助我们理解电荷的运动、电磁波的传播等现象。
4. 热力学模型
热力学模型用来研究热量与能量之间的转换以及物质的性质和状态变化。
它包括热力学定律、热力学过程等,可以帮助我们分析物体的温度变化、热平衡等问题。
5. 光学模型
光学模型研究光的传播与相互作用。
它涉及折射、反射、光的色散等现象,可以用来解释光的传播路径、成像原理等。
6. 相对论模型
相对论描述了高速运动物体的运动规律,包括狭义相对论和广义相对论。
它对时间、空间、质量等概念提出了新的理解,为现代物理学的发展做出了重大贡献。
结论
以上是几个常见的大学物理模型,它们为我们解释了自然界的各种现象提供了重要的理论依据。
通过深入学习和理解这些模型,我们可以更好地掌握大学物理知识,提高解决物理问题的能力。
希望本文档对于学生的学习有所帮助!。
第二讲 简谐振动模型【教学目标】1.掌握简谐振动模型一弹簧振子2.学习计算简谐振动模型→单摆的周期【知识点一】弹簧振子1、定义:物体和弹簧所组成的系统.条件(理想化) : ①物体看成质点②忽略弹簧质量③忽略摩擦力2、回复力:指向平衡位置的合外力提供回复力。
左图:弹簧弹力提供回复力,小球的平衡位置为O ,在AB 两点间做简谐振动,振幅为OA=0B右图:弹簧弹力和重力的合力提供回复力3、周期:2m T Kπ= , 由振子质量和弹簧的劲度系数共同决定,与振幅无关。
★运动规律包含振幅与周期【例】如图所示,是一弹簧振子,设向右方向为正,O 为平衡位置,则下列说法不正确的是( )A A→O 位移为负值,速度为正值B O→B 时,位移为正值,加速度为负值C B→O 时,位移为负值,速度为负值D O→A 时,位移为负值,加速度为正值【例】弹簧振子做简谐运动的振动图像如图2所示,在t1至t2这段时间内( )A 振子的速度方向和加速度方向都不变B 振子的速度方向和加速度方向都改变C 振子的速度方向改变,加速度方向不变D 振子的速度方向不变,加速度方向改变【例】同一个弹簧振子从平衡位置被分别拉开5cm 和2cm,松手后均作简谐运动,则它们的振幅之比A1:A2=______,最大加速度之比a1:a2=_____,振动周期之比T1:T2=______.★回复力【例】如图所示,物体A 放在物体B 上,B 与弹簧相连,它们在光滑水平面上一起做简谐运动.当弹簧伸长到最长时开始记时(t = 0),取向右为正方向,A 所受静摩擦力f 随时间t 变化的图象正确的是( )【例】如图所示,斜面体M 放在粗糙水平面上。
弹簧的一端固定在墙面上,另一端与放在斜面上的物块m 相连,弹簧的轴线与斜面平行。
若物块在斜面上做简谐振动,斜面体保持静止,则斜面体对物块的摩擦力f 与时间t 的关系图象应是下图中的哪一个( )【例】光滑的水平面上放有质量分别为m 和m 21两木块,下方木块与一劲度系数为的弹簧相连,弹簧的另一端固定在墙上,如图所示。
已知两木块之间的最大静摩擦力为,为使这两个木块组成的系统能像一个整体一样地振动,系统的最大振幅为( )A B C D【针对训练】质量为M 的物体B 上放一质量为m 的物体A ,B 与弹簧相连,如图所示,它们一起在光滑的水平面上做简谐振动,振动过程中,A 、B 之间无相对运动,设弹簧的劲度系数为K ,当物体离开平衡位置的位移是x 时,A 、B 间摩擦力的大小是多少【针对训练】如图所示,物体A 置于物体B 上,一轻质弹簧一端固定,另一端与B 相连,在弹性限度范围内,A 和B 一起在光滑水平面上作往复运动(不计空气阻力),始终保持相对静止。
则下列说法正确的是 ( )A A 和B 均作简谐运动B 作用在A 上的静摩擦力大小与弹簧的形变量成正比C B 对A 的静摩擦力对A 做功,而A 对B 的静磨擦力对B 不做功D B 对A 的静摩擦力始终对 A 做正功,而A 对B 的静摩擦力始终对B 做负功【针对训练】如图所示,斜面体M 的底面粗糙,斜面光滑,放在粗糙水平面上。
弹簧的一端固定在墙面上,另一端与放在斜面上的物块m 相连,弹簧的轴线与斜面平行。
若物块在斜面上做简谐运动,斜面体保持静止,则地面对斜面体的摩擦力f 与时间t 的关系图象应是下图中的哪一个( )★振幅与对称性【例】劲度系数为k 的轻质弹簧,下端挂一个质量为m 的小球,小球静止时距地面高为h ,用力向下拉小球,使小球与地面接触,而后从静止放开小球(弹簧始终在弹性限度以内),则下列说法中不正确的是( )A 球在运动过程中距地面的最大高度为2hB 球在上升过程中势能不断减小C 球距地面高度为h 时,速度最大D 球在运动过程中的最大加速度是kh /m【例】如图所示,B 与弹簧固定,A 放在B 上,A 、B 的质量分别为1kg 、2kg ,现用力F 向下压A ,平衡后撤去F ,要使AB 在上升的过程中不分离,F 最大值为( )A 10NB 20NC 30ND 40N【例】如图甲所示,劲度系数为k 的轻弹簧竖直放置,下端固定在水平地面上,一质量为m 的小球,从离弹簧上端高h 处自由下落,接触弹簧后继续向下运动.若以小球开始下落的位置O 点为坐标原点,设竖直向下为正方向,小球的速度v 随时间t 变化的图象如图乙所示.其中OA 段为直线,AB 段是与OA 相切于A 点的曲线,BC 是平滑的曲线,则关于小球的运动过程,下列说法正确的是( )A 0==A A a h x ,B 0=+=B B a kmg h x , C g a kmg h x C C =+=,2 D g a k mg h x C C >+>,2 【例】如图所示,质量为的小球放在劲度为的轻弹簧上,使小球上下振动而又始终未脱离弹簧。
试求:(1)最大振幅A 是多大(2)在这个振幅下弹簧对小球的最大弹力F m 是多大答【例】如图所示,两木块质量分别为m 和M ,用劲度系数为k 的轻弹簧连在一起,放在水平面上,将木块1压下一段距离后释放,它就上下振动.在振动过程中木块2刚好始终不离开地面(即它对地面的最小压力为零),求:(1)木块1的最大加速度. (2)木块2对地面的最大压力.【例】质量为M 的托盘内放有质量为m 的物块开始时手托住托盘,弹簧的劲度系数为K ,弹簧处于自然长,现放手让托盘向下运动,则当系统运动到最低点时的加速度和物块对托盘的压力【针对训练】如图所示,弹簧下端挂一质量为m 的物体,物体在竖直方向上做振幅为A 的简谐运动,当物体振动到最高点时,弹簧正好为原长,则物体在振动过程中( )A 物体在最低点时的弹力大小应为2mgB 弹簧的弹性势能和物体动能总和不变C 弹簧的最大弹性势能等于2mgAD 物体的最大动能应等于mgA【针对训练】如图所示,质量分别为m A =2 kg 和m B =3 kg 的A 、B 两物块,用劲度系数为k 的轻弹簧相连后竖直放在水平面上,今用大小为F=45 N 的力把物块A 向下压而使之处于静止,突然撤去压力,则( )mM 1 2A 物块B 有可能离开水平面 B 物块B 不可能离开水平面C 只要k 足够小,物块B 就可能离开水平面D 只要k 足够大,物块B 就可能离开水平面【针对训练】如图所示,质量为m 的木块放在弹簧上,与弹簧一起在竖直方向上做简谐运动,振幅为A ,(1)物体对弹簧的最大压力是物体重力的倍,则物体对弹簧的最小压力是多大(2)物体对弹簧的最大压力是物体重力的2倍,则物体对弹簧的最小压力是多大【针对训练】如图所示,竖直悬挂的亲弹簧下端系着两物体A 、B ,,,系统静止时弹簧伸长15cm ,若剪断AB 间的细绳,A 做简谐振动,其最大加速度和振幅是多少【针对训练】如图所示,在质量为m 0的无下底的木箱顶部用一轻弹簧悬挂质量均为m (m 0>m )的A 、B 两物体,箱子放在水平地面上,平衡后剪断A 、B 间的连线,A 将做简谐运动,当A 运动到最高点时,木箱对地面的压力为( ) A m 0gB (m 0 - m )gC (m 0 + m )gD (m 0 + 2m )g★振动与动能定理【例】如图所示,一水平弹簧振子在光滑水平面上的B 、C 两点间做简谐振动,O 为平衡位置。
已知振子由完全相同的P 、Q 两部分组成,彼此拴接在一起,当振子运动到B 点的瞬间,将P 拿走,则以后Q 的运动和拿走P 之前比较有( )A Q 的振幅增大,通过O 点时的速率增大B Q 的振幅减小,通过O 点时的速率减小C Q 的振幅不变,通过O 点时的速率增大D Q 的振幅不变,通过O 点时的速率减小【例】如图所示为一个竖直放置的弹簧振子物体沿竖直方向在A 、B 之间做简谐振动,O 点为平衡位置,A 点位置恰好为弹簧的原长。
物体由C 点运动到D 点(C 、D 两点未在图上标出)的过程中,弹簧的弹性势能增加了,重力势能减少了.对于这段过程有如下说法正确的是: ( )A 物体的动能增加BC 点的位置可能在平衡位置以上 CD 点的位置可能在平衡位置以上D 物体经过D 点时的运动方向可能指向平衡位置【针对训练】如图所示,一根轻弹簧左端固定,右端系一物块,物块置于摩擦不能忽略的水平面上。
现将弹簧压缩到A 点后释放,物块运动到B 点时速度变为零,O 为弹簧处于自然长度时的位置,AB 距离为x 0。
物块从A 到B 的过程中,弹簧弹力的大小F 、物块加速度的大小a 、物块速度的大小υ、物块和弹簧组成的系统机械能E 随物块的位移x 变化的图像可能是( )a υ FE m B A m【针对训练】如图所示,水平桌面上的轻质弹簧一端固定,另一端与小物块相连. 弹簧处于自然长度时物块位于O 点(图中未标出). 物块的质量为m,AB =a,物块与桌面间的动摩擦因数为μ. 现用水平向右的力将物块从O 点拉至A 点,拉力做的功为W. 撤去拉力后物块由静止向左运动, 经O 点到达B 点时速度为零. 重力加速度为g. 则上述过程中A 物块在A 点时,弹簧的弹性势能等于12W mga μ-B 物块在B 点时,弹簧的弹性势能小于32W mga μ- C 经O 点时,物块的动能等于W mga μ- D 物块动能最大时弹簧的弹性势能小于物块在B 点时弹簧的弹性势能【知识点二】单摆定义:在细线的一端挂上一个小球,另一端固定在悬点上,如果线的伸缩和质量可以忽略,球的直径比线长短得多,这样的装置叫做单摆.这是一种理想化的模型,一般情况下细线(杆)下接一个小球的装置都可作为单摆.振幅:OA=OB回复力:重力的分力gL T π2= L 为悬点到球心间的距离 ★运动规律 【例】一单摆做小角度摆动,其振动图象如图所示,以下说法正确的是( )A t1时刻摆球速度最大,悬线对它的拉力最小B t2时刻摆球速度为零,悬线对它的拉力最小C t3时刻摆球速度为零,悬线对它的拉力最大D t4时刻摆球速度最大,悬线对它的拉力最大【例】如图所示,单摆摆球的质量为m ,做简谐运动的周期为T ,摆球从最大位移A 处由静止开始释放,摆球运动到最低点B 时的速度为v ,则( )A 摆球从A 运动到B 的过程中重力做的功为22mv B 摆球从A 运动到B 的过程中重力的平均功率为T mv 2C 摆球运动到B 时重力的瞬时功率是mgvD 摆球运动到B 时重力的瞬时功率是零【例】图甲是利用沙摆演示简谐运动图象的装置.当盛沙的漏斗下面的薄木板被水平匀速拉出时,做简谐运动的漏斗漏出的沙在板上形成的曲线显示出沙摆的振动位移随时间的变化关系.已知木板被水平拉动的速度为20cm/s ,图乙所示的一段木板的长度为,则这次实验沙摆的摆长为(取g =π2)( )A BC D【例】如图,两个单摆摆长相等,平衡时两摆球刚好接触.现在将摆球A 在两摆球所在的平面内向左拉开一小角度后释放,碰撞后两个摆球各自做简谐运动,以mA 和mB 分别表示两球质量,则( )A 如果mA>mB ,下一次碰撞将发生在平衡位置右侧 B 如果mA>mB ,下一次碰撞将发生在平衡位置左侧C 无论两摆球的质量关系如何,下一次碰撞都不可能发生在平衡位置右侧D 无论两摆球的质量关系如何,下一次碰撞都不可能发生在平衡位置左侧【例】如下图所示,AC为一段很短的光滑圆弧轨道,其所对圆心角小于5°,D为AC上的一点,现将同一小球先后从C、D两点由静止释放,到达A点的速度分别为υ1、υ2,所用时间为t1、t2,则应有( )A υ1>υ2,t1>t2B υ1=υ2,t1=t2C υ1>υ2,t1=t2 D υ1>υ2,t1<t2【针对训练】一单摆的摆长为40cm,摆球在t=0时刻正从平衡位置向右运动,若g取10 m/s2,则在1s时摆球的运动情况是()A 正向左做减速运动,加速度正在增大B 正向左做加速运动,加速度正在减小C 正向右做减速运动,加速度正在增大D 正向右做加速运动,加速度正在减小【针对训练】如图所示,长度相等的两根悬线分别挂着刚性小球a和b,它们的质量分别为m1和的悬线与竖直方向的夹角为2°,b的悬线与竖直方向的夹有为4°.把两个小球由静止同时释放,那么( )A 两个小球第一次碰撞的位置在悬点的正下方B 两个小球第二次碰撞的位置在悬点的右方C 两个小球第二次碰撞的位置在悬点的右方D 两个小球第二次碰撞的位置在悬点的左方【针对训练】一块涂有碳黑的玻璃板质量为2㎏,在拉力F作用下由静止开始竖直向上作匀变速直线运动,一个装有水平振针的振动频率为5Hz的同定电动音叉在玻璃板上画出了如图所示的曲线,测得OA=1cm,OB=4cm,OC=9cm,则外力F=________N.【针对训练】如下图所示,将单摆小球从静止释放的同时,高出悬点O的另一小球B做自由落体运动,结果它们同时到达跟单摆的平衡位置C等高处,已知摆长为l,偏角θ<10°,求:B球的初位置与单摆悬点之间的高度差h.★摆长与周期【例】有一个秒摆,摆球的质量为50克,当摆球的质量增加到100克时,它的周期是秒;当摆长增加3倍时,它的振动频率是赫兹。