拉格朗日方程的形式_符瑞生
- 格式:pdf
- 大小:296.24 KB
- 文档页数:5


分析力学拉格朗日方程拉格朗日方程是描述物体在力的作用下运动规律的一个重要工具,是分析力学中的核心内容之一、它由意大利科学家拉格朗日在17世纪末提出,是一种基于能量的方法,对于描述系统的运动非常方便和有效。
拉格朗日方程的形式为:d/dt(dL/dq) - ∂L/∂q = Q,其中L为系统的拉格朗日函数,q表示广义坐标,t表示时间,Q表示外力。
拉格朗日函数L通常由系统的动能和势能函数构成,即L = T - V,其中T表示动能,V表示势能。
拉格朗日方程的推导是基于广义坐标的变分原理,即作用量最小原理。
根据广义坐标的定义,系统的运动可以由广义坐标的函数关系描述。
在运动过程中,系统的作用量S定义为积分∫Ldt,即拉格朗日函数关于时间的积分。
根据变分原理,作用量的真实路径使得作用量的变分δS等于零。
通过变分运算可以得到拉格朗日方程。
拉格朗日方程的形式简洁、便于应用,可以用来描述各种复杂的物体和系统。
它可以用来研究刚体的转动、弹簧振子的运动、多体系统的动力学等。
拉格朗日方程的特点是将系统的动能和势能统一在一个函数中描述,因此能够非常清晰地反映出系统的能量变化情况。
拉格朗日方程的应用可以帮助我们解决物理问题和工程实践中的许多复杂情况。
例如,在机械系统中,可以根据拉格朗日方程求解刚体的绕定轴转动、杆塔的动力学问题等。
在电磁学中,可以使用拉格朗日方程来推导电磁场的变化规律,解决复杂电磁场的问题。
在天体力学中,拉格朗日方程可以用来计算行星、卫星和人造星的轨道运动。
总之,拉格朗日方程是分析力学中的一种重要工具,可以简洁明确地描述物体在力的作用下的运动规律。
它具有普适性和广泛的应用性,对于理解和解决物理问题有着重要的意义。
拉格朗日方程组
拉格朗日方程组,又称为拉格朗日运动方程,是描述物体在给定约束下运动的一组方程。
它由法国数学家和力学家约瑟夫·路易·拉格朗日在18世纪中叶提出,适用于各种物体在各
种力场中的运动。
拉格朗日方程组的一般形式为:
∂(∂L/∂(dq/dt))/∂t - ∂L/∂q = 0
其中L是拉格朗日函数,q是广义坐标,t是时间。
这个方程
组描述了物体在给定约束下的运动,其中约束可以是运动约束、力学约束等。
拉格朗日方程组表达了物体在运动中满足的运动方程,是力学中研究物体运动的重要工具。
通过求解拉格朗日方程组,可以得到物体的运动轨迹、速度、加速度等相关信息。
在经典力学中,拉格朗日方程组是研究系统动力学的一种重要方法,能够简洁地描述复杂的动力学问题。
同时,拉格朗日方程组也可以通过哈密顿原理等一些基本理论推导出来。
第3章拉格朗日方程以动力学普遍方程为基础,拉格朗日导出了两种形式的动力学方程,分别称为第一类和第二类拉格朗日方程。
将达朗贝尔原理与虚位移原理相结合,建立起动力学普遍方程,避免了理想约束力的出现;再把普遍方程变为广义坐标形式,进一步转变为能量形式,导出了第二类拉格朗日方程,实现了用最少数目的方程描述动力系统;应用数学分析中的乘子法,采用直角坐标形式的普遍方程和约束方程而建立的一组动力学方程,是第一类拉格朗日方程,便于程式化处理约束动力系统问题。
拉格朗日方程是分析力学得以发展之源。
3.1 第二类拉格朗日方程第二类拉格朗日方程是分析力学中最重要的动力学方程,它给出动力学问题一个普遍、简单而又统一的解法。
拉格朗日方程只适用于完整约束的质点系。
3.1.1 几个关系式的推证为方便起见,在推导拉格朗日方程前,先推证几个关系式。
质点系由n个质点、s个完整的理想约束组成,它的自由度数为k=3n–s,广义坐标数与自由度数相等。
该系统中,任一质点M i的矢径r i可表示成广义坐标q1,q2,…,q k和时间t的函数,即r i=r i(q1,q2,…,q k,t)i=1,2,…,n它的速度(3-1)i=1,2,…,n式中称为h个广义坐标的广义速度,分别为广义坐标和时间的函数,与广义速度没有直接的关系。
式(3-1)对求偏导数,则有(3-2)这是推证的第一个关系式,它表明,任一质点的速度对广义速度的偏导数等于其矢径对广义坐标的偏导数。
为推证第二个关系式,将式(3-1)对广义坐标q j求偏导数,或(3-3)这是第二个关系式,它表明,任一质点的速度对广义坐标的偏导数等于其矢径对广义坐标的偏导数,再对时间的一阶导数。
再看看质点的动能对广义坐标的偏导数。
有(A)又式(3-2)、式(3-3)代入上式,并注意式(A)的关系,(3-4)3.1.2 第二类拉格朗日方程动力学普遍方程可以改写为(3-5)左侧的第一项主动力的虚功之和,可以用广义力Q h在广义虚位移q h上所做的功之和表示,即(3-6)值得指出,这里的主动力并非平衡问题中的主动力,因此,这里的广义力Q h不等于零。
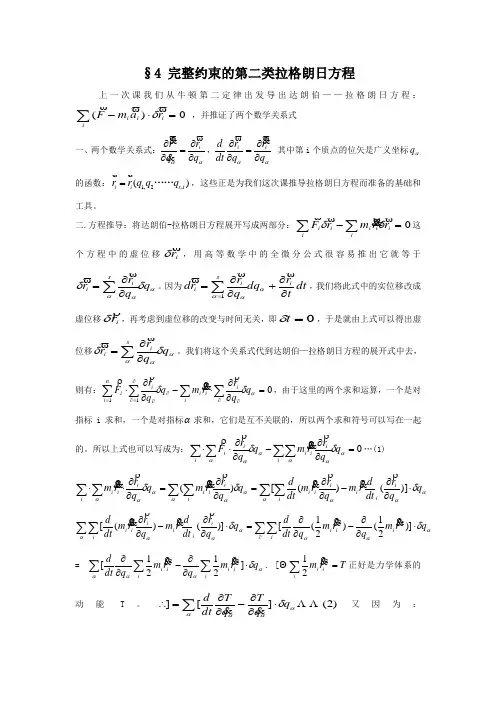
§4 完整约束的第二类拉格朗日方程上一次课我们从牛顿第二定律出发导出达朗伯——拉格朗日方程:0)(=⋅-∑i i ii r a m F δ ,并推证了两个数学关系式一、两个数学关系式:ααq r qr i ∂∂=∂∂ ,ααq r q r dt d i i ∂∂=∂∂ 其中第i 个质点的位矢是广义坐标αq 的函数:1,2,()i i s t r r q q q =……,这些正是为我们这次课推导拉格朗日方程而准备的基础和工具。
二.方程推导:将达朗伯-拉格朗日方程展开写成两部分:0=-∑∑i i i i i i i r r m r F δδ这个方程中的虚位移i r δ,用高等数学中的全微分公式很容易推出它就等于αααδδq q r r s i i ∑∂∂= 。
因为dt t r dq q r r d i s i i ∂∂+∂∂=∑= ααα1,我们将此式中的实位移改成虚位移i r δ,再考虑到虚位移的改变与时间无关,即0=t δ,于是就由上式可以得出虚位移αααδδq q r r s i i ∑∂∂=。
我们将这个关系式代到达朗伯—拉格朗日方程的展开式中去,则有:011=∂∂⋅-∂∂⋅∑∑∑∑∂∂∂=∂=∂∂αδδq q r r m q q r F i i i i n i i i ,由于这里的两个求和运算,一个是对指标i 求和,一个是对指标α求和,它们是互不关联的,所以两个求和符号可以写在一起的。
所以上式也可以写成为:0=∂∂-∂∂⋅⋅∑∑∑∑ααααααδδq q r r m q q r F i i i i i i i …(1) ααααααααααδδδq q r dt d r m q r r m dtd q q r r m q q r r m i i i i i i i i i i i i i i i ⋅∂∂-∂∂=∂∂=∂∂⋅⋅∑∑∑∑∑∑)]()([)( αααααααδδq r m q r m q dt d q q r dt d r m q r r m dt d i i i ii i i i i i i ⋅∂∂-∂∂=⋅∂∂-∂∂∑∑∑∑∂)]21()21([)]()([22 =ααααδq r m q r m q dt d i i i i i i ⋅∂∂-∂∂∑∑∑]2121[22. [∑=i i i T r m 221 正好是力学体系的动能T 。
拉格朗日运动方程式的一般表示形式与各变量含义拉格朗日运动方程式是物理学中常考到的一个重要问题,也是物理学研究进展中最重要的一部分。
拉格朗日运动方程式可以表示出微观现象,它是一个关于空间运动的方程,描述了一个物体在给定的外力下的空间运动情景。
它也是力学,物理学和许多其他科学中最基本的方程之一。
因此,了解拉格朗日运动方程式的一般表示形式和各变量含义非常重要。
拉格朗日运动方程式的一般表示形式可以被概括为:mfrac{d^2x}{dt^2}=F(x,t)其中,m表示物体的质量,x为物体空间位置,t表示时间,F(x,t)表示某一个空间位置x处在某一个时间t时存在的外力,F(x,t) =0表示没有外力,F(x,t)>0表示物体在x处受正方向的外力作用,F(x,t)<0表示物体在x处受负方向的外力作用。
拉格朗日运动方程式中的变量含义包括:m表示物体的质量,x表示物体的空间位置,t表示时间,F(x,t)表示该空间位置x处在某一个时间t时存在的外力,F(x,t)>0表示物体受正方向的外力作用,而F(x,t)<0表示物体受负方向的外力作用。
其实,我们可以简化拉格朗日运动方程式,根据物体质量不同,可以将其分为牛顿第二定律(m=0)和牛顿第三定律(m>0)。
牛顿第二定律可以简化为:F(x,t) = 0物体的运动由外力的大小决定,外力的大小可以表示为一个数值,它和物体的质量和物体的加速度(空间)有关。
牛顿第三定律可以简化为:F(x,t) = ma其中,m表示物体的质量,a表示物体的加速度(空间),F(x,t)表示与物体空间位置x有关的给定外力。
A表示物体受到外力作用后,加速度发生变化。
到这里,我们可以看出,拉格朗日运动方程式是由外力F(x,t),物体质量m,物体加速度a以及时间t四个变量构成的,这四个变量之间的关系可以被概括为:F(x,t)=ma。
总之,拉格朗日运动方程式的一般表示形式是:mfrac{d^2x}{dt^2}=F(x,t),变量m表示物体的质量,x表示物体的空间位置,t表示时间,F(x,t)表示该空间位置x处在某一个时间t 时存在的外力,F(x,t)>0表示物体受正方向的外力作用,而F(x,t)<0表示物体受负方向的外力作用。
拉格朗日方程式拉格朗日方程式________________________________拉格朗日方程式(Lagrange equation)是物理学中的一个重要概念,主要描述了摩擦力学系统中的动力学特性。
它也是物理学中一个很重要的数学工具,常用于解决简单和复杂力学系统中的力学问题。
它可以用来计算物体在受到外力作用时的动力学行为,从而对物体的运动进行分析和预测。
#### 一、拉格朗日方程式的定义拉格朗日方程式是一种数学方程,它可以用来描述物体在外力作用下的动力学行为。
它的基本形式是:\begin{equation}m\ddot x=F_{ext}-F_{int}\end{equation}其中,$x$是物体的位置向量,$m$是物体的质量,$F_{ext}$是物体受到的外力,$F_{int}$是物体内部受到的内力。
#### 二、拉格朗日方程式的应用拉格朗日方程式在物理学中有广泛的应用,常用于解决各种复杂的力学问题。
例如,在求解物体在受到外力作用时的运动轨迹、求解物体在受到外力作用时的运动规律等问题中,都可以使用拉格朗日方程式来解决。
此外,它还可以用来求解物体在受到外力作用时的运动轨迹、求解物体在受到外力作用时的能量变化、求解物体在受到外力作用时的内部应力等问题。
#### 三、拉格朗日方程式的推导在求解拉格朗日方程式之前,我们需要先了解一些基本概念。
例如,我们需要了解物体受到外力作用时所发生的力学过程,以及物体在这个过程中所受到的力和应力。
具体来说,我们需要了解物体在受到外力作用时所发生的力学过程,以及物体在这个过程中所受到的各种外力和内部应力。
然后,我们就可以使用牛顿定律和能量守恒定律来推导拉格朗日方程式。
依据牛顿定律,我们可以得到:\begin{equation}m\ddot x=F_{ext}-F_{int}\end{equation}而依据能量守恒定律,我们可以得到:\begin{equation}\frac{dK}{dt}+\frac{dU}{dt}=0\end{equation}其中,$K$是物体的动能,$U$是物体的位能。
[1/1页][返回]达朗伯原理能将动力学问题转化为静力学问题,虚位移原理是分析静力学的普遍原理;因而,两者结合就能导出分析动力学的普遍方程。
对完整系统,拉格朗日方程是实用的建立动力学方程的方法。
§18-1 动力学普遍方程质系由n 个质点组成。
根据达朗伯原理,在每个质点的主动力F i 、约束力及惯性力平衡。
再根据虚位移原理,它们在质系虚位移上元功之和应为零。
即对受理想约束系统有(18-1)上式称为达朗伯-拉格朗日原理或动力学普遍方程,其直角坐标表达式为(18-2)例18-1 动滑轮上悬挂重物质量为,另一重物质量为,忽略轮、绳的质量及轮轴摩擦,求下降的加速度。
解:(1)考虑整个系统为研究对象,系统具有理想约束,主动力为重力g及g。
引入假想的惯性力F g1及 F g2,方向如图,其大小为则系统平衡。
(2)给系统以虚位移及,则由动力学普遍方程(18-2) 有系统具有一个自由度,由约束关系代入上式,故有例18-2 二均质轮的,求在重力作用下轮Ⅱ中心的加速度。
解:(1)解法一:考虑整个系统,引入惯性力F g及惯性力偶,大小为, ,其中,,为轮Ⅱ中心的加速度及二轮的角加速度。
由动力学普遍方程由约束关系有,①代入上式系统有二自由度,与相互独立,故有,解之得(2)解法二:加惯性力后,按下法给虚位移。
令,,计算虚功(考虑约束关系)∴令,,计算虚功∴与前面一样可解出§18-2 拉格朗日方程1. 动力学普遍方程在广义坐标中的表达式设系统的广义坐标为,则有(18-3)(18-4)代入动力学普遍方程(18-1)引入 ,(18-5)其中按第十七章称为广义力;仿此,称为广义惯性力。
∴受完整约束的系统中,相互独立,上式中前的系数必为零。
∴(18-6)这就是动力学普遍方程在广义坐标中的表达式,其文字表达式为:广义力与广义惯性力相平衡。
2. 拉格朗日方程进一步研究的表达式(18-5)。
由式(18-3)得(18-7)用直接代入法可以证明下述关系式成立,(18-8)上二式称为拉格朗日关系式,它们在下面的推导中起重要作用。