S120 111标准报文结构
- 格式:doc
- 大小:43.00 KB
- 文档页数:1

IEC870-5-101规约报文解释一、规约格式简介1、祯格式101规约的基本祯格式如下所示,具体的解释请参照规约手册,这里不再重复。
固定祯长格式:可变祯长格式:规约中不同的命令,可能采用不同的祯格式。
2、控制域功能码说明主站下发子站功能码子站上送主站功能码二、主站初始化RTU下发命令流程(以非平衡方式通信)以下adrs 表示链路地址(一般为rtu 站址),comadr 表示公共地址(一般为rtu 站址),infadr_l 表示信息体地址低位,infadr_h 表示信息体地址高位,CS 表示祯校验和。
对时祯为长时标方式。
1、 询问链路状态 10 49 adrs CS 16子站回答 10 80 adrs CS2、 复位远方链路1040 adrs CS 子站回答 10 89 adrs CS 3、总召唤 68 10 10 68 16子站确认 68 09 09 68 80 adrs 64 01 07 comadr00 00 14 CS 16子站发送遥测遥信祯(下面将详细解释)子站发送总召唤结束祯68 09 09 68 88 adrs 64 01 0a comadr00 00 14 CS 164、 如果没有召唤全则进行分组召唤下发命令码: 68 09 09 68 7b adrs 64 01 05 comadr子站发送遥测遥信祯(和总召唤的一样,只是信息体地址会有所区别)5、 发对时令 68 0f 0f 68 53 adrs 67 01 06 comadr00 00 milliseconds_l milliseconds_hminutes hours day month year CS 16子站确认祯 68 0f 0f 68 80 adrs 67 01 07 comadr00 00 milliseconds_l milliseconds_hminutes hours day month year CS 166、 召唤全电度 68 09 09 68 73 adrs 65 01 06 comadr00 00 45 CS 16子站发送电度总召唤确认祯68 09 09 68 80 adrs 65 01 07 comadr00 00 45 CS 16子站发送电度祯(下面将详细讲述)子站发送电度结束祯 68 09 09 68 80 adrs 65 01 0a comadr00 00 45 CS 167、 如果电度没有召唤全则进行分组召唤电度68 09 09 68 7b adrs 65 01 05 comadr8、如果ACD位为1则召唤一级数据10 5a adrs CS 16子站发送遥信状态变位祯(下面将详细讲述)如果没有则子站发送E59、召唤二级数据10 7b adrs CS 16如果有变化遥测则子站发送变化遥测祯(下面将详细讲述)如果有SOE则子站发送事件顺序记录祯如果没有相应信息则子站发送E5以上任何一祯发送后子站都应有所回答,如果超时子站没有回答主站都会连发3遍,再没有回答则主站重新询问子站链路状态。

曲轴平衡机 S120驱动系统报文通讯分析摘要曲轴平衡机上的S120驱动系统采用西门子370#标准报文来与电源模块通讯,采用自由报文与CU320以及驱动器通讯。
通过对曲轴平衡机S120驱动系统与PLC系统的报文通讯具体分析,来分析报文通讯的应用方法,并在现有报文基础上修正报文BICO互连缺陷及对应的PLC程序,使设备功能更加合理。
关键词:S120驱动系统;报文通讯;控制字;状态字;引言西门子SINAMICS驱动系统是当前在机械加工设备上应用极为广泛的变频器系统,SINAMICS系列中的SINAMICS S120 是集V/F 控制、矢量控制、伺服控制为一体的多轴驱动系统。
要实现PLC控制S120驱动系统实现控制功能必须与其实现通讯, PLC与S120系统通过通讯协议(报文)来实现数据传输。
本文主要从2个方面进行分析S120报文通讯在曲轴平衡机上的实际应用及改进:1.S120报文通讯介绍:标准报文和自由报文规则;2.曲轴平衡机S120系统报文通讯应用分析及现有报文通讯缺陷问题改进优化分析。
1S120系统报文通讯方式介绍设备要实现相应的功能,必须有控制器(PLC)发出相应的指令,S120的控制模块(CU)接收到指令后控制电源模块和电机模块执行对应的运动控制,如电机启动、旋转等。
设备常借助于PROFIBUS-DP来实现SIMATIC S7-300 与SINAMICS S120之间的数据交换,用S7-300来控制S120的运转及读写所需的参数。
S7-300 与SINAMICS S120交换的数据字的数量及各字的含义。
根据不同的应用来选择相应的报文(此处的报文是指通讯过程中的通讯协议)。
S120 中的报文结构分为三类:1、标准报文(1#、2#、3#、4#、5#、6#、7#、20#报文)标准报文是根据Profidrive规范制定的常规报文,当选择标准报文时,内部的过程参数会自动链接。
选择报文在参数P0922中设定,或者在组态驱动时选择。
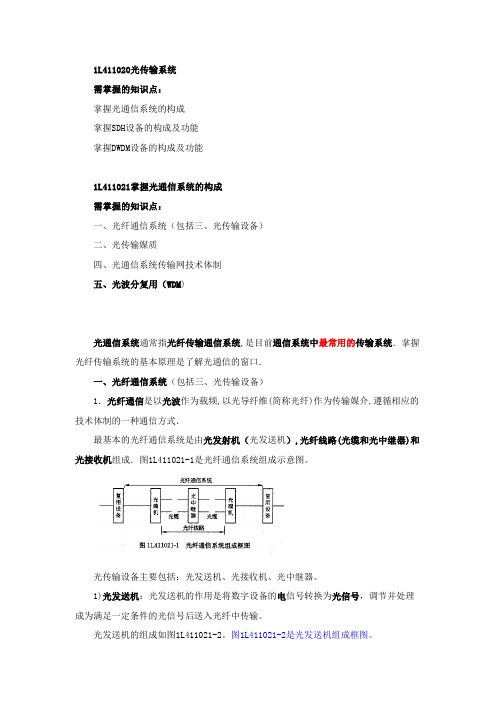
1L411020光传输系统需掌握的知识点:掌握光通信系统的构成掌握SDH设备的构成及功能掌握DWDM设备的构成及功能1L411021掌握光通信系统的构成需掌握的知识点:一、光纤通信系统(包括三、光传输设备)二、光传输媒质四、光通信系统传输网技术体制五、光波分复用(WDM)光通信系统通常指光纤传输通信系统,是目前通信系统中最常用的传输系统.掌握光纤传输系统的基本原理是了解光通信的窗口.一、光纤通信系统(包括三、光传输设备)1.光纤通信是以光波作为载频,以光导纤维(简称光纤)作为传输媒介,遵循相应的技术体制的一种通信方式.最基本的光纤通信系统是由光发射机(光发送机),光纤线路(光缆和光中继器)和光接收机组成.图1L411021-1是光纤通信系统组成示意图。
光传输设备主要包括:光发送机、光接收机、光中继器。
1)光发送机:光发送机的作用是将数字设备的电信号转换为光信号,调节并处理成为满足一定条件的光信号后送入光纤中传输。
光发送机的组成如图1L411021-2。
图1L411021-2是光发送机组成框图。
光源是光发送机的关键器件,它产生光纤通信系统所需要的载波; 输入接口在电/光之间解决阻抗、功率及电位的匹配问题; 线路编码包括码型转换和编码;调制电路将电信号转变为调制电流,以便实现对光源输出功率的调节。
图1L411021-2光发送机组成图光纤通信系统通常采用数字编码,强度调制,直接检波方式调制方式.2)光接收机:光接收机的作用是把经过光纤传输后,脉冲幅度被衰减、宽度被展宽的弱光信号转变为电信号,并放大、再生恢复出原来的信号。
3)光中继器:光中继器的作用是将通信线路中传输一定距离后衰弱、变形的光信号恢复再生,以便继续传输。
二、光传输媒质1.光纤是光通信系统最普遍和最重要的传输媒质,它由单根玻璃纤芯、紧靠纤芯的包层、一次涂覆层以及套塑保护层组成。
光在光纤中传播,会产生信号的衰减和畸变,其主要原因是光纤中存在损耗和色散。


京津城际ETCS-1级应答器报文定义及运用原则1 变量定义1.1 变量将用于对单一数值进行编码,每个变量只有一种含义。
1.2 变量可以有特殊值,其取值与变量的基本含义有关。
1.3 特殊值原则上是取变数的最大值(例如.11...111 =" 未知")1.4 备用的变量值应取正常值和特殊值之间数据范围内的可变值。
1.5 变量名称具有唯一性,含义相同的变量具有相同的名称。
1.6 有符号的变量数值将以“ 2”的补码形式进行编码。
1.7 1位布尔变量总是使用“ 0”作为“假”,“ 1 ”作为“真” <1.8 所有变量都有下列之一的前缀:2 信息包定义2.1 信息包是许多变量在一个单元中的组合,具有固定的数据结构。
2.2 信息包结构包括一个包头:一个唯一的包编号,信息包的位长度,方向信息,可选的距离标尺及定义的相关系列的信息区。
信息包结构如下:2.3 所有当前未定义的包标识码将作为预留,其信息包定义也须遵守上述数据结构,具体可参考ETCS言息包定义。
2.4 报文结束信息包【ETCS-255不遵守上面的规则。
2.5 变量N」TER旨出一个或一组变量重复的次数。
2.6 如果变量N」TER=0则后面没有变量。
2.7 变量反复可以存在两层嵌套。
2.8 在信息包中,如果一个变量是根据其前面的一个限定词的取值是可选的,则该变量在信息包定义中应缩进书写。
3.1 无源应答器和有源应答器默认报文的报文计数器设定为2553.2 LEU及MSTT默认报文的报文计数器设定为0。
3.3 报文计数器0〜253之间按照进路和移动授权长度顺序取值。
3.4 报文计数器禁用254。
4 用户信息包4.1 应答器链接【ETCS-3变量Q_NEWCOUNTR义了被链接应答器与本应答器地区编号是否相同,当被链接应答器与本应答器地区编号相同时,变量NID_C取消4.1.2 当主信号机(进出站信号机)处应答器链接失败时,车载设备触发紧急制动。
01S120是一款高性能变频器,主要用于控制和调节三相交流异步电机的速度和转矩。
02S120具有多种控制模式,包括速度控制、转矩控制、位置控制等,可满足不同应用场景的需求。
03S120还具备丰富的保护功能,如过流、过压、欠压、过热等,确保电机及变频器本身的安全运行。
S120定义及功能高性能S120采用先进的矢量控制技术,实现高精度、高动态响应的速度和转矩控制。
易用性S120提供简洁直观的操作界面和丰富的调试工具,方便用户进行参数设置和故障诊断。
可靠性S120采用高品质元器件和严格的生产工艺,确保产品的高可靠性和长寿命。
灵活性S120支持多种通讯协议和扩展模块,可与其他自动化设备实现无缝集成。
产品特点及优势01适用范围02应用场景S120适用于各种需要三相交流异步电机驱动的应用场合,如机床、风机、泵、压缩机、传送带等。
S120可广泛应用于工业自动化、能源、交通、建筑等领域,如自动化生产线、风力发电、电动汽车、电梯等。
适用范围和应用场景电机控制模块对电机进行精确控制,实现电机的启动、停止、调速等功能。
模块负责接收和发送数字量或模拟量信号,实现与外部设备的交互。
通信模块实现S120与其他设备或系统之间的数据传输和通信。
CPU 模块负责控制逻辑运算、数据处理等功能,是S120的核心部件。
电源模块为S120提供稳定可靠的电源,保证系统正常运行。
主要硬件部件介绍01连接方法通过电缆将各硬件部件连接起来,形成完整的S120系统。
02配置步骤首先进行系统初始化设置,然后根据实际需求配置各硬件部件的参数和功能。
03注意事项在连接和配置过程中,需确保电源稳定、接线正确、参数设置合理等,以避免出现故障或损坏设备。
硬件连接与配置方法03S120可能出现的故障包括电源故障、通信故障、I/O 故障等,其原因可能是硬件损坏、接线错误、参数设置不当等。
故障现象与原因针对不同类型的故障,可采用观察指示灯、检查接线、查看故障代码等方法进行排查。
101规约(2002版)报文解析速查1、初始化●主站发: 10 49 4F 98 16目的:给地址为4F的子站发请求链路状态命令。
子站回答:10 0B 4F 5A 16目的:子站向主站响应链路状态。
●主站发: 10 40 4F 8F 16目的:给地址为4F的子站发复位通信单元命令。
子站回答:10 20 4F 6F 16目的:ACD位置1,表明子站向主站请求1级数据上送。
●主站发: 10 7A 4F C9 16目的:向地址为4F的子站发召唤1级数据命令。
子站回答:68 09 09 68 28 4F 46 01 04 4F 00 00 00 11 16 (ASDU70,CON=28,COT=4)目的:子站以ASDU70(初始化结束)响应主站的召唤。
并ACD位置1,表明子站继续向主站请求1级数据上送。
后面跟随时间同步和总查询。
2、对时●主站发:68 0F 0F 68 73 00 67 01 06 00 00 00 CD 85 36 0D 1E 0C 04 A4 16目的:给地址为0的子站发对时命令。
对时时间为:04年12月31日13时54分34秒253毫秒报文解析:子站发:68 0F 0F 68 80 00 67 01 07 00 00 00 F7 01 36 0D 1E 0C 04 58 16目的:以ASDU67响应主站对时命令。
3、 总召唤● 主站发:68 09 09 68 53 4F 64 01 06 4F 00 00 14 70 16目的:向地址为4F 的子站发总召唤命令。
子站回答:10 20 4F 6F 16目的:ACD 位置1,表明子站向主站请求1级数据上送。
● 主站发:10 5A 4F A9 16目的:向地址为4F 的子站发召唤1级数据的命令。
子站回答:68 09 09 68 28 4F 64 01 07 4F 00 00 14 46 16目的:子站响应总召唤,ACD 位置1。
● 主站发: 10 7A 4F C9 16目的:主站向子站召唤1级数据。