CT(UNIDRIVE)变频器参数表
- 格式:doc
- 大小:316.50 KB
- 文档页数:5
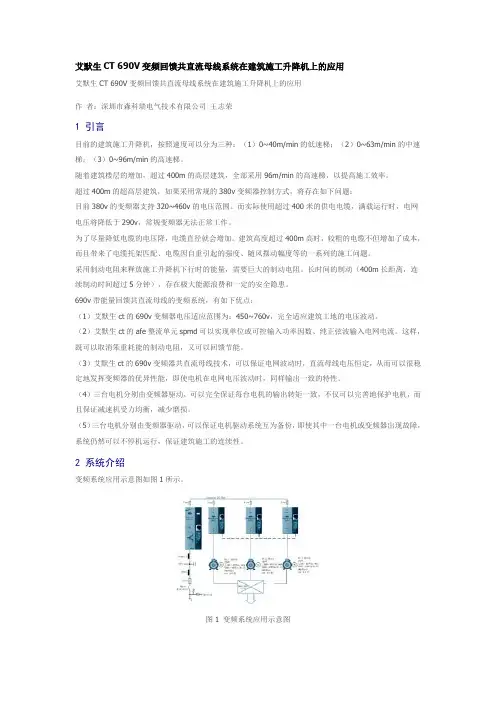
艾默生CT 690V变频回馈共直流母线系统在建筑施工升降机上的应用艾默生CT 690V变频回馈共直流母线系统在建筑施工升降机上的应用作者:深圳市森科瑞电气技术有限公司王志荣1 引言目前的建筑施工升降机,按照速度可以分为三种:(1)0~40m/min的低速梯;(2)0~63m/min的中速梯;(3)0~96m/min的高速梯。
随着建筑楼层的增加,超过400m的高层建筑,全部采用96m/min的高速梯,以提高施工效率。
超过400m的超高层建筑,如果采用常规的380v变频器控制方式,将存在如下问题:目前380v的变频器支持320~460v的电压范围。
而实际使用超过400米的供电电缆,满载运行时,电网电压将降低于290v,常规变频器无法正常工作。
为了尽量降低电缆的电压降,电缆直径就会增加。
建筑高度超过400m高时,较粗的电缆不但增加了成本,而且带来了电缆托架匹配、电缆因自重引起的强度、随风摆动幅度等的一系列的施工问题。
采用制动电阻来释放施工升降机下行时的能量,需要巨大的制动电阻。
长时间的制动(400m长距离,连续制动时间超过5分钟),存在极大能源浪费和一定的安全隐患。
690v带能量回馈共直流母线的变频系统,有如下优点:(1)艾默生ct的690v变频器电压适应范围为:450~760v,完全适应建筑工地的电压波动。
(2)艾默生ct的afe整流单元spmd可以实现单位或可控输入功率因数、纯正弦波输入电网电流。
这样,既可以取消笨重耗能的制动电阻,又可以回馈节能。
(3)艾默生ct的690v变频器共直流母线技术,可以保证电网波动时,直流母线电压恒定,从而可以很稳定地发挥变频器的优异性能,即使电机在电网电压波动时,同样输出一致的特性。
(4)三台电机分别由变频器驱动,可以完全保证每台电机的输出转矩一致,不仅可以完善地保护电机,而且保证减速机受力均衡,减少磨损。
(5)三台电机分别由变频器驱动,可以保证电机驱动系统互为备份,即使其中一台电机或变频器出现故障,系统仍然可以不停机运行,保证建筑施工的连续性。
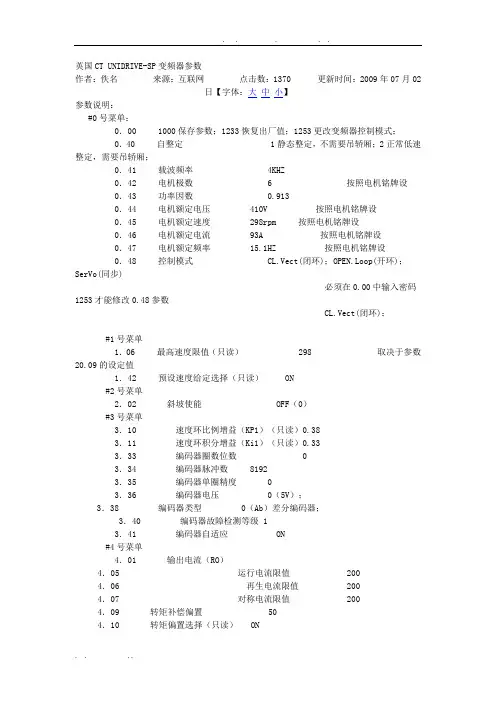
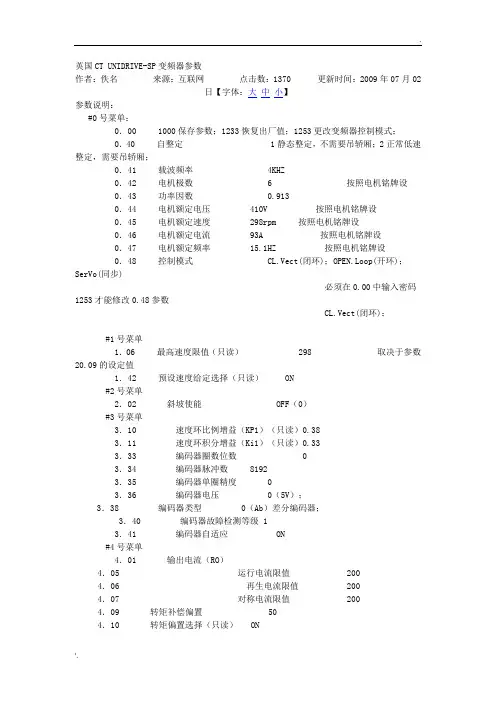
英国CT UNIDRIVE-SP变频器参数作者:佚名来源:互联网点击数:1370 更新时间:2009年07月02日【字体:大中小】参数说明:#0号菜单:0.00 1000保存参数;1233恢复出厂值;1253更改变频器控制模式;0.40 自整定1静态整定,不需要吊轿厢;2正常低速整定,需要吊轿厢;0.41 载波频率 4KHZ0.42 电机极数 6 按照电机铭牌设0.43 功率因数 0.9130.44 电机额定电压 410V 按照电机铭牌设0.45 电机额定速度 298rpm 按照电机铭牌设0.46 电机额定电流 93A 按照电机铭牌设0.47 电机额定频率 15.1HZ 按照电机铭牌设0.48 控制模式 CL.Vect(闭环);OPEN.Loop(开环);SerVo(同步)必须在0.00中输入密码1253才能修改0.48参数CL.Vect(闭环);#1号菜单1.06 最高速度限值(只读) 298 取决于参数20.09的设定值1.42 预设速度给定选择(只读) ON#2号菜单2.02 斜坡使能 OFF(0)#3号菜单3.10 速度环比例增益(KP1)(只读)0.383.11 速度环积分增益(Ki1)(只读)0.333.33 编码器圈数位数 03.34 编码器脉冲数 81923.35 编码器单圈精度 03.36 编码器电压 0(5V);3.38 编码器类型 0(Ab)差分编码器;3.40 编码器故障检测等级 13.41 编码器自适应 ON#4号菜单4.01 输出电流(RO)4.05 运行电流限值 2004.06 再生电流限值 2004.07 对称电流限值 2004.09 转矩补偿偏置 504.10 转矩偏置选择(只读) ON4.11 转矩方式选择 4(带力矩补偿的方式)4.12 电流给定滤波器1(只读) 2ms (降低电机噪音)4.13 电流环比例增益电机自整定时自动生成 4954.14 电流环积分增益电机自整定时自动生成 6014.15 894.19 1.14.24 用户使用最大电流调整系数 200#5号菜单5.06 电机额定频率 15.1HZ 按照电机铭牌设(等同于0.47)5.07 电机额定电流 93A 按照电机铭牌设(等同于0.46) 5.08 电机额定转速 298rpm 按照电机铭牌设 (等同于0.45)5.09 电机额定电压 410V 按照电机铭牌设(等同于0.44)5.10 电机功率因数 0.913 异步电机自整定得出5.11 电机极数 6 按照电机铭牌设(等同于0.42)5.13 动态V/F流量优化选择 OFF5.15 低频电压推进 25.17 电机定子阻抗 0.098 电机自整定得出5.18 载波频率 4KHZ5.24 瞬抗 3.446 电机自整定得出5.25 86.455.29 535.30 805.32 19.65 电机自整定得出#7号菜单7.07 T5/6 模拟量输入1偏置 -0.257.08 T5/6 模拟量输入1增益 17.09 T5/6 模拟量输入1反相 OFF7.10 T5/6 模拟量输入1目的地址(只读)18.037.15 T8 模拟量输入3模式 VOLT(6)7.16 T8 模拟量输入3增益 47.17 T8 模拟量输入3反相 ON(1)此数据有修改,取反7.18 T8 模拟量输入3目的地址 4.08 设置为转矩给定,调节启动#8号菜单8.10 31号端子取反选择 0(OFF不取反) 1(ON 取反)8.11 24号端子取反选择 ON(1) 取反,设置的是运行,运行时通8.12 25号端子取反选择 08.13 26号端子取反选择 08.14 27号端子取反选择 08.15 28号端子取反选择 08.16 29号端子取反选择 08.17 41,42号端子取反选择 1(ON)变频器故障输出信号由常闭变常开8.18 22号端子取反选择 1(ON)8.21 24号端子功能选择 10.02 变频器运行8.22 25号端子输入源 10.338.24 27号端子输入源 6.30 正转8.25 28号端子输入源 6.32 反转8.27 41,42号端子功能选择 10.01 变频器正常(故障输出)8.28 22号端子功能选择 0.00 24V电源输出8.29 变频器端子功能选择1(ON)(0:0V输入有效;1:24V输入有效)8.31 24号端子输入(出)选择 1 (ON)(0:输入; 1:输出)8.32 25号端子输入(出)选择 0 (0:输入; 1:输出)8.33 26号端子输入(出)选择 0 (0:输入; 1:输出)#16号菜单无效#18号菜单18.01 软件版本号 10618.11 20 设定滤波时间18.12 2800 静止时的速度环比例增益18.13 500 运行时的速度环比例增益18.14 2560 减速时的速度环比例增益18.15 3300 静止时的速度环积分增益18.16 100 运行时的速度环积分增益18.17 350 减速时的速度环积分增益18.18 0 静止时的速度环微分增益18.19 0 运行时的速度环微分增益18.20 0 减速时的速度环微分增益18.21 2500 静止时的速度环比例增益保持时间18.22 100 从静止速度环比例增益至运行比例增益切换时间18.23 300 从运行速度环比例增益至减速比例增益切换时间18.24 2500 静止时的速度环积分增益保持时间18.25 80 从静止速度环积分增益至运行积分增益切换时间18.26 10 从运行速度环积分增益至减速积分增益切换时间18.27 0 静止时的速度环微分增益保持时间18.28 0 从静止速度环微分增益至运行微分增益切换时间18.29 0 从运行速度环微分增益至减速微分增益切换时间18.30 20 负载补偿滤波时间18.31 ON 速度指令输入PID使能18.41 ON 速度环减速比例增益动作使能 18.42 ON 速度环减速积分增益动作使能18.43 OFF 速度环减速微分增益动作使能18.44 OFF 运行方向反相18.45 OFF 速度曲线加速率计算使能18.46 ON 速度指令滤波使能18.47 OFF 双极性速度给定使能。

ct变频器配置参数设置CT变频器自整定设置类故障的处理一旦发生了参数设置类故障,变频器都不能正常运行,最好是能够把所有参数恢复到出厂值,然后按上数步骤重新设置相关参数。
对于每个公司的变频器其参数恢复方式也不尽相同,对第二、三类参数可以用改变应用宏的方式来恢复出厂值,西门子MM420/MM440变频器的AOP面板仅能存储一组参数。
变频器选型手册中介绍AOP面板中能存储10组参数,但在用AOP面板作第二台变频器参数的备份时,显示存储容量不足。
解决办法如下:(1)在菜单中选择语言项;lt;(2)在语言项中选择一种不使用的语言;艾默生CT变频器自整定设置(3)按Fn+△键选择删除,经提示后按P键确认。
这样,AOP面板就可存储10组参数。
造成这种现象的原因可能是设计时AOP面板中的内存不够。
3、过压类故障对变频器来说,都有一个正常的工作电压范围,当电压超过这个范围时就很可能损坏变频器,常见的过电压有两类。
3.1输入交流过电压这种情况是指输入交流电源的电压超过正常值,一般发生在节假日线路负载较轻,电压升高或者线路出现故障,笔者就经常遇到星期一刚上班,变频器故障指示报警,断开电源,过一会再送电启动即可正常。
3.2发电状态时的过电压这种情况出现的概率较高,主要是电动机的实际转速比同步转速还高,而使电动机处于发电状态或者是中频炉工作于向电网回馈能量时,而变频器又没有安装制动单元引起的,以下情况可引起这一故障。
(1)当变频器拖动大惯性负载时,其减速时间设置较小,在减速过程中,变频器输出频率减小的速度快,而负载靠本身阻力减速较慢,使得负载拖动电动机的转速比变频器输出频率所对应的同步转速还要高,电动机处于发电状态,而变频器没有能量回馈功能,因而变频器直流回路电压升高,超过其保护值,出现故障。
(2)中频炉或中频设备在向电网回馈能量时也会使输入电压过高而出现故障。

初级指南Commander SK三相交流感应电机驱动器(0.25kW-4kW,0.33hp-5hp)含A、B、C三种型号部件号:0472-0022-02版本:2总述对于任何因不当、错误或疏忽的设备安装或对设备的可选参数的不当、错误或疏忽设置或是由于电机与驱动器不匹配而导致的任何后果,生产商均不承担责任。
本指南的内容在出版时视为正确。
为了保证对产品的不断开发和完善,生产商保留对产品的规格或其性能或本指南的内容进行修改的权利,恕不另行通知。
版权所有。
未经出版商书面许可,不得对本指南任何部分以任何方式进行复制或传播,无论是以电子或机械的方式,包括影印,记录或使用信息存储或检索系统。
驱动器软件版本本产品所附带的软件为最新版本。
如果将本产品与其它驱动器一起用于新的或现有系统,由于驱动器软件版本可能不同,将导致本产品功能上的差异,从CT驱动中心返还的驱动器也会有上述问题。
如有任何疑问,请与当地的Control Techniques驱动器中心或分销商联系。
环保声明Control Techniques 致力于最大程度地减少其生产活动及其产品在使用期间对环境的影响。
因此,我们实施了环境管理系统(EMS),该系统已经通过ISO 14001认证。
如需查询有关EMS,或我公司的环境政策及其它相关信息,请向我公司索取或登陆 。
Control Techniques 生产的驱动器在长期使用中,节能高效,可以减少原材料的消耗和浪费,该产品的上述优点运行抵消了在生产过程中及报废时环境的影响。
当产品结束使用寿命时,可以轻易地拆解成大部件以便有效回收。
许多部件可以无需使用工具即可装配或拆卸。
而其它部件是用普通的螺丝装配的。
实际上所有的部件都可循环使用。
产品的包装质量上乘并可重复使用。
体积大的产品装在木箱里,而体积小的产品则装在坚固的纸箱里,而这些纸箱本身也包含了可循环使用的纤维材料。
如无需再使用,可回收这些包装箱。
用于包装产品的保护薄膜和胶塑袋可以由同样的方式进行回收。
数字式交流调速产品UNIDRIVE现场调试规范北京二十一世纪科技发展有限公司2000年4月数字式交流调速产品现场调试规范一、适用范围:本调试规范适用于由英国C. T. 公司统一全数字交流控制器Unidrive系列的产品组成的各种控制设备的现场检验与调试。
调试过程应依照本规范进行,并参照C. T.公司的技术资料及设备控制原理图。
二、外观检查:1.检查柜体、控制屏、操作台箱有无磕碰、掉漆等,如有损坏应查明原因,并据此检查内部有无损伤,及时处理。
2.检查柜内、屏内、台箱内的各种电气元件有无脱落或损坏,及时处理。
3.检查各紧固件的连接情况,应无松动,连接可靠。
重点检查各电气元件的接线端、Unidrive的接线端及外引端子的接线端。
三、接线检查:1.与用户及施工安装单位做好安装接线的交接工作,了解安装过程中出现的问题,及时处理。
2.使用试铃或其他校线器材,依据电气原理图、接线端子图和敷设电缆表逐条电缆检查设备之间、控制柜之间、操作台之间及其相互之间的连接线。
同时根据原理图和电缆表检查接线的线径、用线标准是否符合设计要求。
四、空载调试1、准备工作:(1)各操作台上、控制柜中的给定电位器应处于零位。
(2)各操作台上的所有转换开关应处于无效的位置,控制柜内若有内外控选择开关应置于内控位置。
(3)控制柜中的所有自动开关应处于断路位置。
(4)应将电机与减速箱或生产机械脱开2、低压柜向控制柜送电、PLC及继电回路调试(1)用万用表或示波器从外引端子处或接线母排处测量交流主电源、辅助电源是否正常。
注意Unidrive的正常工作电源是380V-10%~480V+10%。
(2)PLC调试:a、若有交流净化电源、测量其输出电压应该为220V AC或符合PLC的电源要求。
b、用编程器或编程软件将程序送入机器,使其处于在线编程状态或停止状态。
c、通过编程器或编程软件检查所有输入点上连接的开关、继电器等动作是否正确。
d、通过编程器或编程软件,采用“台制”方式检查所有输出口的状态及动作是否正确。
CT-ES变频器项目电梯调试数据配德国阿尔法无齿轮主机(2009-10-1323:04:57)标签:杂谈一:电梯配置主机参数:无齿轮速度:1.0m/s电动机型号:EPM300-FSR-021,00-23B-W00 600V 45A 2000/rpm IP:20 (实际设定:380V,25A,18级,1230/rpm)编码器:差动编码器规格:4096脉冲(需要使用SM-Resolver卡)驱动变频器: EMERSON-(UNIDRIVE-ES)(程序版本:#20.01=107)控制主板:F5021(程序:N01F3B04)二:端子定义25:多段速326:多段速229:多段速128:上行指令27:下行指令31:使能信号22:输入信号公共端41:变频器故障信号公共端42:变频器故障信号24:变频器运行信号(由继电器控制)SM-Resolver卡编码器分频输出信号5:B-4:B+2:A-1:A+编码器输入编码器固定主机侧圆插件线号对应SM-Resolver卡接线(1-12COS HIGH,2-11COS LOW,3-10SIN HIGH,4-9SIN LOW,7-13REF HIGH,8-14REF LOW,9-15“接地”)三:参数设定变频器参数:0.00:密码 1000保存参数;149密码; 1233恢复出厂值;1253更改变频器控制模式;0.01:最低速度 00.02:最高速度 1230rpm0.03:加速斜率 0.5cm/s20.04:减速斜率 0.5cm/s20.05:给定模式选择Pr数字量0.06:电流限 156。
20.12:参数选择 0 (0号菜单选择)0.13:电机额定转速 1230rpm0.14:电梯额定速度 1000mm/s0.15: V1 100mm/s 检修半速0.16: V2 2000.17: V3 70mm/s 爬行速度0.18: V4 200mm/s 检修速度0.29:4096 编码器脉冲数(相当与16.10)0.42:18POLE (相当与5.11)0.43:303.3 (相当与3.25)0.44:380V (相当与5.09)0.45:123RPM (相当与5.08)0.46:25A (相当与5.07)0.47:0.48:Ser vo同步控制2.02:斜坡使能 ON(1)2.03:斜坡保持 OFF(0)2.04:斜坡方式选择 FAST(1)2.10:加速斜率选择器 22.20:减速斜率选择器 23.24:0(闭环)3.26: SLOT23.34:4096编码器脉冲数)3.36:5V(编码器电压)3.38;AB(编码器类型:差分AB相)3.42:0(编码器滤波“如果现场编码器干扰很大可以设定最大不要大于8”)3.43:30000(编码器脉冲数最大给定值)3.41:编码器自动检测 O OFF(0)4.05:运行电流限值4.06:再生电流限值4.07:对称电流限值 156.24.12:电流给定滤波器1 4ms (降低电机噪音)4.24:用户设电流限值 126.25.07:25A电机电流5.08:1230rpm电机转速5.09: 380v电机电压5.11:18POLE电机级数5.18:6 PWM开关频率选择8.10:0FF 31号端子取反8.11: ON 24号端子取反8.12:OFF 25号端子取反8.13:OFF 26号端子取反8.14:OFF 27号端子取反8.15:OFF 28号端子取反8.16:OFF 19号端子取反8.17:0N 41,42号端子取反8.18:ON 22号端子取反8.21:10.02 24号端子功能选择变频器运行8.22:18.38 25号端子功能选择多段速38.23:18.37 26号端子功能选择多段速28.24:19.44 27号端子功能选择正转(不可以改变)8.25:18.44 28号端子功能选择反转(不可以改变)8.26:18.36 29号端子功能选择多段速18.27:10.01 41,42号端子功能选择变频器正常/故障输出8. 28: 0.00 22号端子功能 24V电压输出8. 29: ON 变频器端子功能选择(OFF:OV输入有效 ON:24V输入有效)8. 31: ON 24号端子输入(出)功能选择(OFF:输入 ON:输出)8. 32: OFF 25号端子输入(出)功能选择(OFF:输入 ON:输出)8. 33: OFF 26号端子输入(出)功能选择(OFF:输入 ON:输出)16.10:4096(编码器)16.17: 116.24: 16.0516.25: 1。
英国CT UNIDRIVE-SP变频器参数作者:佚名来源:互联网点击数:1370 更新时间:2009年07月02日【字体:大中小】参数说明:#0号菜单:0.00 1000保存参数;1233恢复出厂值;1253更改变频器控制模式;0.40 自整定1静态整定,不需要吊轿厢;2正常低速整定,需要吊轿厢;0.41 载波频率 4KHZ0.42 电机极数 6 按照电机铭牌设0.43 功率因数 0.9130.44 电机额定电压 410V 按照电机铭牌设0.45 电机额定速度 298rpm 按照电机铭牌设0.46 电机额定电流 93A 按照电机铭牌设0.47 电机额定频率 15.1HZ 按照电机铭牌设0.48 控制模式 CL.Vect(闭环);OPEN.Loop(开环);SerVo(同步)必须在0.00中输入密码1253才能修改0.48参数CL.Vect(闭环);#1号菜单1.06 最高速度限值(只读) 298 取决于参数20.09的设定值1.42 预设速度给定选择(只读) ON#2号菜单2.02 斜坡使能 OFF(0)#3号菜单3.10 速度环比例增益(KP1)(只读)0.383.11 速度环积分增益(Ki1)(只读)0.333.33 编码器圈数位数 03.34 编码器脉冲数 81923.35 编码器单圈精度 03.36 编码器电压 0(5V);3.38 编码器类型 0(Ab)差分编码器;3.40 编码器故障检测等级 13.41 编码器自适应 ON#4号菜单4.01 输出电流(RO)4.05 运行电流限值 2004.06 再生电流限值 2004.07 对称电流限值 2004.09 转矩补偿偏置 504.10 转矩偏置选择(只读) ON4.11 转矩方式选择 4(带力矩补偿的方式)4.12 电流给定滤波器1(只读) 2ms (降低电机噪音)4.13 电流环比例增益电机自整定时自动生成 4954.14 电流环积分增益电机自整定时自动生成 6014.15 894.19 1.14.24 用户使用最大电流调整系数 200#5号菜单5.06 电机额定频率 15.1HZ 按照电机铭牌设(等同于0.47)5.07 电机额定电流 93A 按照电机铭牌设(等同于0.46) 5.08 电机额定转速 298rpm 按照电机铭牌设 (等同于0.45)5.09 电机额定电压 410V 按照电机铭牌设(等同于0.44)5.10 电机功率因数 0.913 异步电机自整定得出5.11 电机极数 6 按照电机铭牌设(等同于0.42)5.13 动态V/F流量优化选择 OFF5.15 低频电压推进 25.17 电机定子阻抗 0.098 电机自整定得出5.18 载波频率 4KHZ5.24 瞬抗 3.446 电机自整定得出5.25 86.455.29 535.30 805.32 19.65 电机自整定得出#7号菜单7.07 T5/6 模拟量输入1偏置 -0.257.08 T5/6 模拟量输入1增益 17.09 T5/6 模拟量输入1反相 OFF7.10 T5/6 模拟量输入1目的地址(只读)18.037.15 T8 模拟量输入3模式 VOLT(6)7.16 T8 模拟量输入3增益 47.17 T8 模拟量输入3反相 ON(1)此数据有修改,取反7.18 T8 模拟量输入3目的地址 4.08 设置为转矩给定,调节启动#8号菜单8.10 31号端子取反选择 0(OFF不取反) 1(ON 取反)8.11 24号端子取反选择 ON(1) 取反,设置的是运行,运行时通8.12 25号端子取反选择 08.13 26号端子取反选择 08.14 27号端子取反选择 08.15 28号端子取反选择 08.16 29号端子取反选择 08.17 41,42号端子取反选择 1(ON)变频器故障输出信号由常闭变常开8.18 22号端子取反选择 1(ON)8.21 24号端子功能选择 10.02 变频器运行8.22 25号端子输入源 10.338.24 27号端子输入源 6.30 正转8.25 28号端子输入源 6.32 反转8.27 41,42号端子功能选择 10.01 变频器正常(故障输出)8.28 22号端子功能选择 0.00 24V电源输出8.29 变频器端子功能选择1(ON)(0:0V输入有效;1:24V输入有效)8.31 24号端子输入(出)选择 1 (ON)(0:输入; 1:输出)8.32 25号端子输入(出)选择 0 (0:输入; 1:输出)8.33 26号端子输入(出)选择 0 (0:输入; 1:输出)#16号菜单无效#18号菜单18.01 软件版本号 10618.11 20 设定滤波时间18.12 2800 静止时的速度环比例增益18.13 500 运行时的速度环比例增益18.14 2560 减速时的速度环比例增益18.15 3300 静止时的速度环积分增益18.16 100 运行时的速度环积分增益18.17 350 减速时的速度环积分增益18.18 0 静止时的速度环微分增益18.19 0 运行时的速度环微分增益18.20 0 减速时的速度环微分增益18.21 2500 静止时的速度环比例增益保持时间18.22 100 从静止速度环比例增益至运行比例增益切换时间18.23 300 从运行速度环比例增益至减速比例增益切换时间18.24 2500 静止时的速度环积分增益保持时间18.25 80 从静止速度环积分增益至运行积分增益切换时间18.26 10 从运行速度环积分增益至减速积分增益切换时间18.27 0 静止时的速度环微分增益保持时间18.28 0 从静止速度环微分增益至运行微分增益切换时间18.29 0 从运行速度环微分增益至减速微分增益切换时间18.30 20 负载补偿滤波时间18.31 ON 速度指令输入PID使能18.41 ON 速度环减速比例增益动作使能 18.42 ON 速度环减速积分增益动作使能18.43 OFF 速度环减速微分增益动作使能18.44 OFF 运行方向反相18.45 OFF 速度曲线加速率计算使能18.46 ON 速度指令滤波使能18.47 OFF 双极性速度给定使能。
艾默生CT驱动器产品介绍艾默生CT驱动器的功率范围从0.37kW 到1.9MW 。
CT驱动器可配置为成5种工作模式(开环、闭环、矢量、伺服和再生回馈模式),艾默生CT驱动器可与大多数工业标准网络连接,接受14 种位置反馈协议,有各种插件选项模块可选择,板载PLC 作用可提供补充作用,在此项目中是用可编程模块实现的。
产品类别●Unidrive SP 模块式——45KW-1.9MW——200V/400V/575V/690V——模块式大功率交流驱动器●Unidrive SP独立机柜式——90KW-1.6MW——380V-690V——大功率交流驱动器●Digitax ST——0.72Nm-19.3Nm(57.7Nm 峰值)——200V/400V——智能、紧凑、动态的伺服驱动器系列●EV5000——2.2KW-220KW——380V-440V——通用矢量控制变频器●Unidrive M——0.25KW-1.2MW——100V-690V——制造自动化行业专用伺服及交流驱动器●Unidrive SP 表面安装式——0.37KW-132KW——200V/400V/575V/690V——高性能交流伺服驱动器●Unimotor hd——0.72Nm-16Nm——48Nm峰值——适合苛刻应用场合的紧凑型伺服电机●Mentor MP——25A-7400A——400V/575V/690V——高性能直流驱动器●EV2100——7.5KW-280KW——380-440V——风机泵专用变频驱动器●EV1000/EV2000——0.4KW-280KW——200V-240V/380V-440V——通用型交流变频器●Unimotor fm——0.72Nm-136Nm——408Nm峰值——高性能交流无刷伺服电机产品特点1.各类流行总线模块,如Profibus,DeviceNet,CANopen,Modbus RTU,Interbus,CTNET。
英国CTUNIDRIVE-ES变频器参数说明4201数冲脉器码编92.03s /m m 0001线曲S 车停52.03s /m m 0001线曲S 行运42.03s /m m 005线曲S 动启32.02s /m m 0051率斜速减车停22.0度速层多s /m m 00017V 12.0度速层双s /m m 00016V 02.0度速层单s/m m 0085V 91.0度速修检s /m m 0514V 81.0度速行爬s /m m 053V 71.02V 61.0速半修检s/m m 571V 51.0s /m m 0001度速定额梯电41.0m p r 0741速转定额机电31.0)择选单菜号0(0择选数参21.0)步同V E S (%002;)环闭L C (%571限流电60.0)入输量字数(r P 择选式模定给50.02s /m c 5.0率斜速减40.02s /m c 5.0率斜速加30.0m p r 0051度速高最20.00度速低最10.0;式模制控器频变改更3521;值厂出复恢3321;数参存保0001码密00.0:单菜号0#:明说数参器频变S E -E V I R D I N U T C 国英0.40自整定1(静态整定);2(旋转整定)0.41载波频率6KHZ0.42电机极数4按照电机铭牌设0.43同步电机相位角同步电机自整定得出0.44电机额定电压380V按照电机铭牌设0.45电机额定速度1470rpm按照电机铭牌设0.46电机额定电流25A按照电机铭牌设0.47电机额定频率50HZ按照电机铭牌设0.48控制模式CL.Vect(闭环);OPEN.Loop(开环);SerV o(同步) 必须在0.00中输入密码1253才能修改0.48参数#2号菜单2.02斜坡使能ON(1)2.03斜坡保持OFF(0)2.04斜坡方式选择FAST(1)2.10加速斜率选择器22.11加速斜率0.5cm/s2(等同于0.03)2.20减速斜率选择器22.21减速斜率0.5cm/s2(等同于0.04)#3号菜单3.24控制模式CL.Vect(闭环);OPEN.Loop(开环);SerV o(同步)(等同于0.48)3.34编码器脉冲数1024(等同于0.29)3.36编码器电压0(5V);1(8V);2(15V)3.38编码器类型0(Ab)差分编码器;9(SC.EndAt)海德汉1313编码器;3.41编码器自动检测ON(1)#4号菜单4.05运行电流限值2004.06再生电流限值2004.07对称电流限值2004.11转矩方式选择4(带力矩补偿的方式)4.12电流给定滤波器14ms(降低电机噪音)4.13电流环比例增益默认值4.14电流环积分增益默认值4.15热时间常数默认值#5号菜单5.06电机额定频率50HZ按照电机铭牌设(等同于0.47)5.07电机额定电流25A按照电机铭牌设(等同于0.46)5.08电机额定速度1470rpm按照电机铭牌设(等同于0.45) 5.09电机额定电压380V按照电机铭牌设(等同于0.44)5.10电机功率因数异步电机自整定得出5.11电机极数4按照电机铭牌设(等同于0.42)5.18载波频率6KHZ5.33千转马达电压根据铭牌计算出#8号菜单8.1031号端子取反选择0(不取反)1(取反)8.1124号端子取反选择1(取反)8.1225号端子取反选择08.1326号端子取反选择08.1427号端子取反选择08.1528号端子取反选择08.1629号端子取反选择08.1741,42号端子取反选择08.1822号端子取反选择18.2124号端子功能选择10.02变频器运行8.2225号端子输入源18.38多段速38.2326号端子输入源18.37多段速28.2427号端子输入源19.44正转(18.45=1可以改变正反转)8.2528号端子输入源18.44反转(18.45=1可以改变正反转)8.2629号端子输入源18.36多段速18.2741,42号端子功能选择10.01变频器正常(故障输出)8.2822号端子功能选择0.0024V电源输出8.29变频器端子功能选择1(0:0V输入有效;1:24V输入有效)8.3124号端子输入(出)选择1(0:输入;1:输出)8.3225号端子输入(出)选择0(0:输入;1:输出)8.3326号端子输入(出)选择0(0:输入;1:输出)#18号菜单18.11V175mm/s检修半速(等同于0.15)18.12V2(等同于0.16)18.13V350mm/s爬行速度(等同于0.17)18.14V4150mm/s检修速度(等同于0.18)18.15V5800mm/s单层速度(等同于0.19)18.16V61000mm/s双层速度(等同于0.20)18.17V71000mm/s多层速度(等同于0.21)18.18启动优化速度6mm/s(改善启动舒适感)18.23磁场建立阀值60018.25运行比例增益2000(高速P)18.26运行积分增益500(高速I)18.27启动比例增益30000(低速P)18.28启动积分增益1200(低速I)18.29电机额定转速1470rpm(等同于0.13)18.30电梯额定速度1000mm/s(等同于0.14)18.42多段速给定选择类型OFF(0)OFF(0):二进制ON (1):一对一给定18.45正转和反转方向取反OFF(0)ON(1)取反18.48切换增益选择ON(1)设为1,则分段有效,18.25-18.28起作用18.49惯量补偿ON(1)#19号菜单19.11增益转换时间2000ms19.13停车减速斜率1500mm/s2(等同于0.22)19.14启动S曲线500mm/s3(等同于0.23)19.15运行S曲线1000mm/s3(等同于0.24)19.16停车S曲线1000mm/s3(等同于0.25)19.17启动优化加加速度10mm/s3(从零速到启动优化速度的加速度) 19.25制动器打开延时500(制动器打开到速度命令给出的时间)19.26运行方向设置ON(1)双方向输入OFF(0单方向输入)19.27减速比的分母119.28启动优化时间1000ms19.29曳引轮直径400mm(根据现场轮子实际尺寸)19.30减速比分子119.34电流环滤波时间常数OFF(0)ON(1):4.12参数有效19.44顺时针方向(反转)OFF(0)#20号菜单20.01软件版本20.02软件运行标志20.10钢丝绳绕法21=1/1;2=2/1;二.电机自整定:1.电机处于空载状态;2.短接使输入,输出接触器和抱闸接触器吸合;3.设置参数#0.40=2;4.给变频器使能和方向信号;5.按键盘上的RUN键,曳引机会缓缓转动,变频器交替显示AUTO TUNE;6.当变频器显示STOP,去除使能和方向信号;7.#0.40自动归0;8.在#0.00菜单中输入1000,保存自整定参数;9.自整定参数保存在:异步电机:#5.10(功率因数);同步电机:#0.43(相位角);。
艾默生CT变频器代理商咨询电话:0755-******** QQ:2407299229EV1000、EV2000高性能通用型艾默生变频器G为恒转矩负载,P为风机水泵负载(EV1000:0.4-5.5KW EV2000:5.5-280KW)EV1000-2S0004G 单相220VAC 0.4KW EV1000-2S0007G 单相220VAC0.75KW EV1000-2S0015G 单相220VAC 1.5KW EV1000-2S0022G 单相220VAC 2.2KW EV1000-4T0007G 三相380VAC0.75KW EV1000-4T0015G 三相380VAC1.5KW EV1000-4T0022G 三相380VAC2.2KW EV1000-4T0037G 三相380VAC3.7KW EV1000-4T0055G 三相380VAC5.5KW EV1000-4T0037P 三相380VAC3.7KW EV1000-4T0055P 三相380VAC 5.5KWEV2000-4T0055G/0075P 5.5KW/7.5KW EV2000-4T0075G/0110P7.5KW/11KW EV2000-4T0110G/0150P 11KW/15KW EV2000-4T0150G/1085P 15KW/18.5KW EV2000-4T0185G1/0220P118.5KW/22KW EV2000-4T0220G1/0300P1 22KW/30KW EV2000-4T0300G1/0370P1 30KW/37KW EV2000-4T0370G/0450P37KW/45KW EV2000-4T0450G1/0550P1 45KW/55KW EV2000-4T0550G 55KW EV2000-4T0750G 75KW EV2000-4T0900G 90KW EV2000-4T1100G 110KW EV2000-4T1320G 132KW EV2000-4T1600G 160KW EV2000-4T2000G 200KW EV2000-4T2200G 220KW EV2000-4T0750P 75KW EV2000-4T0900P 90KW EV2000-4T1100P 110KW EV2000-4T1320P 132KW EV2000-4T1600P 160KW EV2000-4T2000P 200KW EV2000-4T2200P 220KW EV2000-4T2800P 280KWEV3000系列矢量艾默生变频器(2.2KW-220KW)EV3000艾默生变频器是高品质、多功能、低噪音的矢量控制通用变频器。
英国CT UNIDRIVE-SP变频器参数参数说明:#0号菜单:0.00 1000保存参数;1233恢复出厂值;1253更改变频器控制模式;0.40 自整定1静态整定,不需要吊轿厢;2正常低速整定,需要吊轿厢;0.41 载波频率 4KHZ0.42 电机极数 6 按照电机铭牌设0.43 功率因数 0.9130.44 电机额定电压 410V 按照电机铭牌设0.45 电机额定速度 298rpm 按照电机铭牌设0.46 电机额定电流 93A 按照电机铭牌设0.47 电机额定频率 15.1HZ 按照电机铭牌设0.48 控制模式 CL.Vect(闭环);OPEN.Loop(开环);SerVo(同步)必须在0.00中输入密码1253才能修改0.48参数CL.Vect(闭环);#1号菜单1.06 最高速度限值(只读) 298 取决于参数20.09的设定值1.42 预设速度给定选择(只读) ON#2号菜单2.02 斜坡使能 OFF(0)#3号菜单3.10 速度环比例增益(KP1)(只读)0.383.11 速度环积分增益(Ki1)(只读)0.333.33 编码器圈数位数 03.34 编码器脉冲数 81923.35 编码器单圈精度 03.36 编码器电压 0(5V);3.38 编码器类型 0(Ab)差分编码器;3.40 编码器故障检测等级 13.41 编码器自适应 ON#4号菜单4.01 输出电流(RO)4.05 运行电流限值 2004.06 再生电流限值 2004.07 对称电流限值 2004.09 转矩补偿偏置 504.10 转矩偏置选择(只读) ON4.11 转矩方式选择 4(带力矩补偿的方式)4.12 电流给定滤波器1(只读) 2ms (降低电机噪音)4.13 电流环比例增益电机自整定时自动生成 4954.14 电流环积分增益电机自整定时自动生成 6014.15 894.19 1.14.24 用户使用最大电流调整系数 200#5号菜单5.06 电机额定频率 15.1HZ 按照电机铭牌设(等同于0.47)5.07 电机额定电流 93A 按照电机铭牌设(等同于0.46) 5.08 电机额定转速 298rpm 按照电机铭牌设 (等同于0.45)5.09 电机额定电压 410V 按照电机铭牌设(等同于0.44)5.10 电机功率因数 0.913 异步电机自整定得出5.11 电机极数 6 按照电机铭牌设(等同于0.42)5.13 动态V/F流量优化选择 OFF5.15 低频电压推进 25.17 电机定子阻抗 0.098 电机自整定得出5.18 载波频率 4KHZ5.24 瞬抗 3.446 电机自整定得出5.25 86.455.29 535.30 805.32 19.65 电机自整定得出#7号菜单7.07 T5/6 模拟量输入1偏置 -0.257.08 T5/6 模拟量输入1增益 17.09 T5/6 模拟量输入1反相 OFF7.10 T5/6 模拟量输入1目的地址(只读)18.037.15 T8 模拟量输入3模式 VOLT(6)7.16 T8 模拟量输入3增益 47.17 T8 模拟量输入3反相 ON(1)此数据有修改,取反7.18 T8 模拟量输入3目的地址 4.08 设置为转矩给定,调节启动#8号菜单8.10 31号端子取反选择 0(OFF不取反) 1(ON 取反)8.11 24号端子取反选择 ON(1) 取反,设置的是运行,运行时通8.12 25号端子取反选择 08.13 26号端子取反选择 08.14 27号端子取反选择 08.15 28号端子取反选择 08.16 29号端子取反选择 08.17 41,42号端子取反选择 1(ON)变频器故障输出信号由常闭变常开8.18 22号端子取反选择 1(ON)8.21 24号端子功能选择 10.02 变频器运行8.22 25号端子输入源 10.338.24 27号端子输入源 6.30 正转8.25 28号端子输入源 6.32 反转8.27 41,42号端子功能选择 10.01 变频器正常(故障输出)8.28 22号端子功能选择 0.00 24V电源输出8.29 变频器端子功能选择1(ON)(0:0V输入有效;1:24V输入有效)8.31 24号端子输入(出)选择 1 (ON)(0:输入; 1:输出)8.32 25号端子输入(出)选择 0 (0:输入; 1:输出)8.33 26号端子输入(出)选择 0 (0:输入; 1:输出)#16号菜单无效#18号菜单18.01 软件版本号 10618.11 20 设定滤波时间18.12 2800 静止时的速度环比例增益18.13 500 运行时的速度环比例增益18.14 2560 减速时的速度环比例增益18.15 3300 静止时的速度环积分增益18.16 100 运行时的速度环积分增益18.17 350 减速时的速度环积分增益18.18 0 静止时的速度环微分增益18.19 0 运行时的速度环微分增益18.20 0 减速时的速度环微分增益18.21 2500 静止时的速度环比例增益保持时间18.22 100 从静止速度环比例增益至运行比例增益切换时间18.23 300 从运行速度环比例增益至减速比例增益切换时间18.24 2500 静止时的速度环积分增益保持时间18.25 80 从静止速度环积分增益至运行积分增益切换时间18.26 10 从运行速度环积分增益至减速积分增益切换时间18.27 0 静止时的速度环微分增益保持时间18.28 0 从静止速度环微分增益至运行微分增益切换时间18.29 0 从运行速度环微分增益至减速微分增益切换时间18.30 20 负载补偿滤波时间18.31 ON 速度指令输入PID使能18.41 ON 速度环减速比例增益动作使能 18.42 ON 速度环减速积分增益动作使能18.43 OFF 速度环减速微分增益动作使能18.44 OFF 运行方向反相18.45 OFF 速度曲线加速率计算使能18.46 ON 速度指令滤波使能18.47 OFF 双极性速度给定使能。