限位开关控制自往返电路原理图解
- 格式:doc
- 大小:38.50 KB
- 文档页数:3
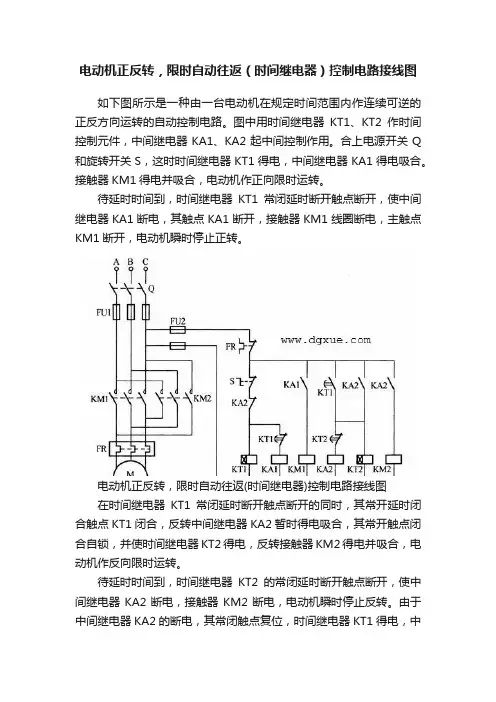
电动机正反转,限时自动往返(时间继电器)控制电路接线图
如下图所示是一种由一台电动机在规定时间范围内作连续可逆的正反方向运转的自动控制电路。
图中用时间继电器KT1、KT2作时间控制元件,中间继电器KA1、KA2起中间控制作用。
合上电源开关Q 和旋转开关S,这时时间继电器KT1得电,中间继电器KA1得电吸合。
接触器KM1得电并吸合,电动机作正向限时运转。
待延时时间到,时间继电器KT1常闭延时断开触点断开,使中间继电器KA1断电,其触点KA1断开,接触器KM1线圈断电,主触点KM1断开,电动机瞬时停止正转。
电动机正反转,限时自动往返(时间继电器)控制电路接线图
在时间继电器KT1常闭延时断开触点断开的同时,其常开延时闭合触点KT1闭合,反转中间继电器KA2暂时得电吸合,其常开触点闭合自锁,并使时间继电器KT2得电,反转接触器KM2得电并吸合,电动机作反向限时运转。
待延时时间到,时间继电器KT2的常闭延时断开触点断开,使中间继电器KA2断电,接触器KM2断电,电动机瞬时停止反转。
由于中间继电器KA2的断电,其常闭触点复位,时间继电器KT1得电,中
间继电器KA1吸合,KM1得电吸合,电动机又处于正向限时运转状态。
这样周而复始重复前面工作过程,使电动机在规定时间内作连续可逆运转。
若需使电动机停止,可扳开旋转开关S,待KT2延时时间到,电动机停转。
本电路适用于在规定时间内作连续可逆运转的生产机械。
自动往返控制电路原理与调试图解引言自动往返控制电路是一种常见的电路,用于控制电动机或其他装置在两个方向之间来回运动。
本文将介绍自动往返控制电路的原理和调试方法。
原理自动往返控制电路的基本原理是使用两个触发器和一个中继器来实现方向的切换。
触发器的输入端分别与两个开关连接,输出端与中继器连接。
当一个开关被按下时,触发器会改变状态,中继器的输出也会相应地改变。
另一个开关被按下时,另一个触发器会改变状态,中继器的输出再次改变。
这样,电动机或其他装置就可以在两个方向之间往返运动。
图解以下是一个简化的自动往返控制电路的示意图:自动往返控制电路图解](图片链接)开关1和开关2分别连接到触发器1和触发器2的输入端。
触发器1和触发器2的输出端分别连接到中继器的输入端。
中继器的输出端连接到电动机或其他装置。
调试方法在调试自动往返控制电路时,可以按照以下步骤进行:1.确保电源接线正确,检查电路中的连接是否牢固。
2.按下开关1,观察中继器的输出是否切换到相应状态。
如果没有切换,检查触发器1和中继器的连接是否正确。
3.松开开关1,观察中继器的输出是否保持在相应状态。
如果没有保持,检查触发器1和中继器的连接是否正确,同时检查触发器2和中继器的连接是否正确。
4.按下开关2,观察中继器的输出是否切换到相应状态。
如果没有切换,检查触发器2和中继器的连接是否正确。
5.松开开关2,观察中继器的输出是否保持在相应状态。
如果没有保持,检查触发器2和中继器的连接是否正确,同时检查触发器1和中继器的连接是否正确。
结论自动往返控制电路利用触发器和中继器的组合,可以实现电动机或其他装置在两个方向之间的往返运动。
在调试过程中,要注意检查电路连接是否正确,同时观察中继器的输出状态来确认电路是否正常工作。
以上是自动往返控制电路原理与调试图解的文档。
希望对您有帮助!。

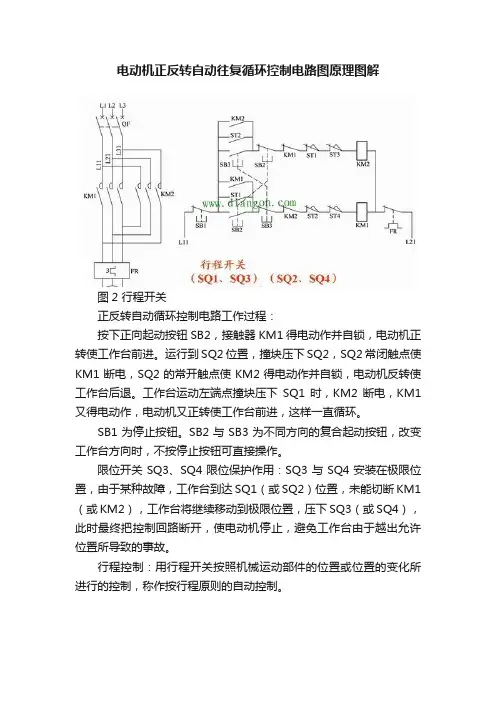
电动机正反转自动往复循环控制电路图原理图解
图2 行程开关
正反转自动循环控制电路工作过程:
按下正向起动按钮SB2,接触器KM1得电动作并自锁,电动机正转使工作台前进。
运行到SQ2位置,撞块压下SQ2,SQ2常闭触点使KM1断电,SQ2的常开触点使KM2得电动作并自锁,电动机反转使工作台后退。
工作台运动左端点撞块压下SQ1时,KM2断电,KM1又得电动作,电动机又正转使工作台前进,这样一直循环。
SB1为停止按钮。
SB2与SB3为不同方向的复合起动按钮,改变工作台方向时,不按停止按钮可直接操作。
限位开关SQ3、SQ4限位保护作用:SQ3与SQ4安装在极限位置,由于某种故障,工作台到达SQ1(或SQ2)位置,未能切断KM1(或KM2),工作台将继续移动到极限位置,压下SQ3(或SQ4),此时最终把控制回路断开,使电动机停止,避免工作台由于越出允许位置所导致的事故。
行程控制:用行程开关按照机械运动部件的位置或位置的变化所进行的控制,称作按行程原则的自动控制。
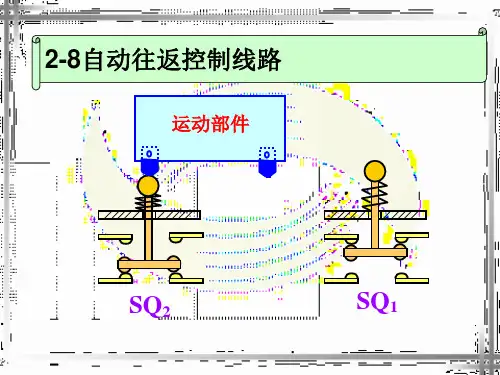

1.位置控制线路(又称行程控制或限位控制线路)图1-59 位置控制电路图图1-60 LX19系列行程开关 图1-61 行程开关的符号在图1-59所示的右下角是行车运动示意图,在行车运行路线的两头终点处各安装的一个电器SQ1和SQ2叫做行程开关,如图1-60所示是LX19系列行程开关的外形图,行程开关的符号如图1-61所示。
SQ1和SQ2的常闭触头分别串接在正转控制电路和反转控制电路中。
当安装在行车前后的挡铁1或挡铁2撞击行程开关的滚轮时,行程开关的常闭触头分断,切断控制电路,使行车自动停止。
可见,位置控制就是利用生产机械运动部件上的挡铁与行程开关碰撞,使行程开关的触头动作,来接通或断开电路,以实现对生产机械运动部件的位置或行程的自动控制。
过移动行程开关的安装位置来调节。
滚轮想一想:当行车上的挡铁撞击行程开关使其停止向前运行后,这时再按下启动按钮SB1,线路会不会接通使行车继续前行?为什么?2.行程开关行程开关又称限位开关,是一种利用生产机械某些运动部件的碰撞来发出控制指令的主令电器。
主要用于控制生产机械的运动方向、速度、行程大小或位置,是一种自动控制电器。
行程开关的作用原理与按钮相同,区别在于它不是靠手指的按压使其触头动作,而是利用生产机械运动部件的碰压使其触头动作,从而将机械信号转变为电信号,使运动机械按一定的位置或行程实现自动停止、反向运动、变速运动或自动往返运动。
(1)结构及工作原理机床中常用的行程开关有LX19和JLXK1等系列,各系列行程开关的基本结构大体相同,都是由操作机构、触头系统和外壳组成,如图1-62所示。
以某种行程开关元件为基础,装置不同的操作机构,可得到各种不同形式的行程开关,常见的有按钮式(直动式)和旋转式(滚轮式)。
JLXK1系列行程开关的外形如图1-63所示。
图1-62 JLXK1型行程开关的结构和动作原理a)按钮式 b) 单轮旋转式 c) 双轮旋转式图1-63 JLXK1系列行程开关操作机构触头系统外壳想一想:把行程开关与按钮在线路中的作用比较一下,能找出它们有哪些异同吗?JLXK1系列行程开关的动作原理如图1-62b所示。
限位开关操控主动交游电路原理图解
1、限位开关操控主动交游电路(1)限位开关操控主动交游电路(1)作业原理:按起动按钮SB2,KM1吸兼并自保,电动机正转,股动机械设备左移。
当撞块碰压行程开关SQ2时,KM1断电,KM2得电吸兼并自保,电动机回转,机械设备右移。
当撞块碰压行程开关SQ1时,KM2断电,KM1得电,电动机又正转左移。
SB1为接连按钮。
电路由按钮SB
2、SB3及行程开关SQ1、SQ2的动断触点完毕了机械联锁,串联在沟通触摸器线圈KM1、KM2中的KM2、KM1辅佐触点完毕了电气联锁。
串联在操控电路中的FR常闭触点,是在电动机过负载或缺相过热时热继电器将操控电路主动断开,维护了电动机。
2、限位开关操控主动交游电路(2)限位开关操控主动交游电路(2)电路作业原理:按起动按钮SB2,KM1吸兼并自保,电动机正转,股动机械设备左移。
当撞块碰压行程开关SQ2时,KM1断电,KM2得电吸兼并自保,电动机回转,机械设备右移。
当撞块碰压行程开关SQ1时,KM2断电,KM1得电,电动机又正转左移。
SB1为接连按钮。
电路由按钮SB2、SB3及行程开关SQ1、SQ2的动断触点完毕了机械联锁,串联在沟通触摸器线圈KM1、KM2中的KM2、KM1辅佐触点完毕了电气联锁。
串联在操控电路中的FR常闭触点,是在电动机过负载或缺相过热时热继电器将操控电路主动断开,维
护了电动机。
SQ3、SQ4S是左移和右移的终端方位行程开关。
限位开关控制自动往返电路原理图解
1、限位开关控制自动往复电路(1)
限位开关控制自动往复电路(1)工作原理:按起动按钮SB2,KM1吸合
并自保,电动机正转,带动机械设备左移。
当撞块碰压行程开关SQ2时,KM1断电,KM2得电吸合并自保,电动机反转,机械设备右移。
当撞块碰压行程开关SQ1时,KM2断电,KM1得电,电动机又正转左移。
SB1为停止按钮。
电路由按钮SB2、SB3及行程开关SQ1、 SQ2的动断触点实现了机械联锁,串联在交流接触器线圈KM1、KM2中的KM2、KM1辅助触点实现了电气联锁。
串联在控制电路中的FR常闭触点,是在电动机过负载或缺相过热时热继电器将控制电路自动断开,保护了电动机。
2、限位开关控制自动往复电路(2)
限位开关控制自动往复电路(2)电路工作原理:
按起动按钮SB2,KM1吸合并自保,电动机正转,带动机械设备左移。
当撞块碰压行程开关SQ2时,KM1断电,KM2得电吸合并自保,电动机反转,机械设备右移。
当撞块碰压行程开关SQ1时,KM2断电,KM1得电,电动机又正转左移。
SB1为停止按钮。
电路由按钮SB2、SB3及行程开关SQ1、 SQ2的动断触点实现了机械联锁,串联在交流接触器线圈KM1、KM2中的KM2、KM1辅助触点实现了电气联锁。
串联在控制电路中的FR常闭触点,是在电动机过负载或缺相过热时热继电器将控制电路自动断开,保护了电动机。
SQ3、SQ4S是左移和右移的终端位置行程开关。