第四章李雅普诺夫稳定性理论
- 格式:pdf
- 大小:6.58 MB
- 文档页数:52
04第四章李雅普诺夫稳定性理论汇总李雅普诺夫稳定性理论是数学中一项重要的稳定性理论,对于研究动力系统的稳定性具有重要的指导意义。
该理论由俄罗斯数学家李雅普诺夫于19世纪末和20世纪初提出,后经实践证明,被广泛应用于不同领域的研究中。
李雅普诺夫稳定性理论的核心思想是通过构造李雅普诺夫函数来分析系统的稳定性。
李雅普诺夫函数是一个满足一定条件的实数函数,它能够度量系统中各个状态的变化情况,并通过数学分析得出系统状态的稳定性。
在李雅普诺夫稳定性理论中,一般使用正定函数来构造李雅普诺夫函数。
对于一个动力系统,假设其状态空间为n维实数向量,系统的演化过程可以表示为一个关于状态变量的微分方程。
为了判断系统在其中一状态的稳定性,需要构造一个函数V(x),其中x表示状态变量。
如果函数V(x)满足以下两个条件:1.V(x)是正定函数,即对于所有的x,都有V(x)>0,且只有在x=0时,V(x)=0成立。
2.对于系统中任意两个状态x1和x2,如果V(x2)>V(x1),则在系统演化的过程中,x2的状态比x1更不稳定。
那么,可以推导出系统在状态x=0附近的稳定性。
如果对于所有的状态x,有V(x)>V(x=0),那么系统就是在x=0处的稳定点。
如果只有在x=0附近,存在一个圆盘区域,使得对于所有的状态x,有V(x)>V(x=0),那么系统就是局部稳定的。
通过构造李雅普诺夫函数,可以得出系统的稳定性信息。
对于局部稳定性,可以通过计算雅普诺夫函数的导数来得到更详细的信息。
如果导数小于零,则系统是渐进稳定的;如果导数等于零,则系统是边界稳定的;如果导数大于零,则系统是不稳定的。
李雅普诺夫稳定性理论不仅适用于连续系统,也适用于离散系统。
对于离散系统,李雅普诺夫函数的构造和分析方式与连续系统类似,只是微分方程变为差分方程。
总结起来,李雅普诺夫稳定性理论是一种基于构造李雅普诺夫函数来分析系统稳定性的方法。
通过构造正定函数,可以得出系统的稳定性信息,并通过李雅普诺夫函数的导数来得到更详细的稳定性判断。
第4章李雅普诺夫稳定性分析李雅普诺夫稳定性分析是数学分析中的一个重要概念,它用于判断非线性系统在其中一点附近的稳定性。
李雅普诺夫稳定性分析方法最初由俄国数学家李雅普诺夫提出,广泛应用于控制论、微分方程和动力系统等领域。
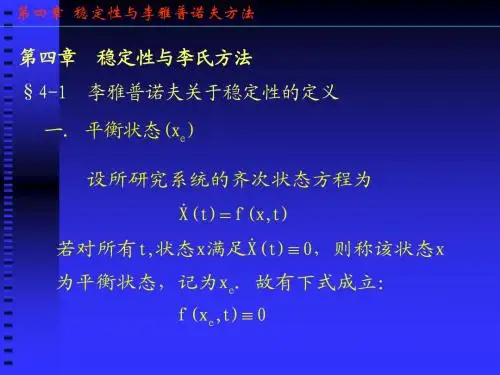
在进行李雅普诺夫稳定性分析时,首先需要确定非线性系统的平衡点。
平衡点是指系统在其中一时刻的状态不再发生变化,即各个状态变量的导数为零。
在平衡点附近,可以通过线性化的方法来近似非线性系统,即将非线性系统转化为线性系统进行分析。
接下来,利用李雅普诺夫稳定性定理可以判断线性化系统的稳定性。
根据定理的不同形式,可以分为不动点稳定性定理和周期解稳定性定理。
不动点稳定性定理是指当线性化系统的特征根都具有负的实部时,非线性系统在平衡点附近是稳定的;而当至少存在一个特征根具有正的实部时,非线性系统在平衡点附近是不稳定的。
这个定理对于线性化系统为一阶系统或者线性化系统的特征根为复数的情况适用。
周期解稳定性定理是指当线性化系统的所有特征根满足一定条件时,非线性系统在周期解附近是稳定的。
这个定理对于封闭曲线解以及周期解的情况适用。
当线性化系统无法满足上述定理时,可以使用李雅普诺夫直接法来判断非线性系统的稳定性。
李雅普诺夫直接法是基于李雅普诺夫函数的概念,通过构造合适的李雅普诺夫函数来判断非线性系统的稳定性。
李雅普诺夫函数是满足以下条件的函数:1)李雅普诺夫函数的导数在其中一区域内是负定的,即导数的每个分量都小于或等于零;2)在平衡点附近,李雅普诺夫函数取得最小值。
通过构造合适的李雅普诺夫函数,并验证满足上述条件,就可以判断非线性系统的稳定性。
如果李雅普诺夫函数的导数在整个状态空间都是负定的,则非线性系统是全局稳定的;如果李雅普诺夫函数的导数在一些有限的状态空间内是负定的,则非线性系统是局部稳定的。
总之,李雅普诺夫稳定性分析是一种有力的工具,可以用于判断非线性系统的稳定性。
不过需要注意的是,李雅普诺夫稳定性分析方法仅适用于平衡点附近的稳定性分析,对于非线性系统的全局稳定性分析还需要其他的方法。
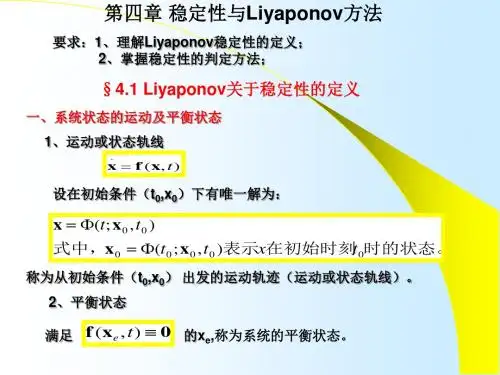
第四章稳定性与李雅普诺夫方法稳定性与李雅普诺夫方法是控制理论中的两个重要概念。
稳定性是控制系统分析中的基本问题之一,它描述了系统在受到干扰后能否回到平衡状态的能力。
李雅普诺夫方法是一种常用的稳定性分析方法,通过构造李雅普诺夫函数来判断系统的稳定性。
稳定性是控制系统设计中最基本的要求之一、一个稳定的系统能够在受到干扰后迅速恢复到平衡状态,而不会发生不可控制的震荡或不稳定的行为。
稳定性可以分为两种类型:渐近稳定性和有界稳定性。
渐近稳定性要求系统的状态能够收敛到一个稳定的平衡点,而有界稳定性要求系统的状态能够保持在一个有限范围内。
李雅普诺夫方法是一种通过构造李雅普诺夫函数来判断系统稳定性的方法。
李雅普诺夫函数是一个标量函数,它满足以下条件:1)对于任意非零的向量,李雅普诺夫函数的导数都是负的或零;2)当且仅当系统达到稳定时,李雅普诺夫函数的导数为零。
通过构造李雅普诺夫函数并分析其导数的符号,可以判断系统的稳定性。
在实际应用中,人们通常使用李雅普诺夫直接法、李雅普诺夫间接法和李雅普诺夫-克拉洛夫稳定性定理等方法来进行稳定性分析。
其中,李雅普诺夫直接法是最常用的方法之一,它通过选择一个合适的李雅普诺夫函数来判断系统的稳定性。
如果可以找到一个李雅普诺夫函数,使得该函数的导数对于所有非零的初始条件都是负的,则系统是渐近稳定的。
李雅普诺夫间接法是通过构造一个李雅普诺夫方程来判断系统的稳定性。
李雅普诺夫方程是一个微分方程,其中包含系统的状态向量和一个非负标量函数,满足一定的条件。
如果可以找到一个满足李雅普诺夫方程的解,并且该解是有界的,则系统是有界稳定的。
李雅普诺夫-克拉洛夫稳定性定理是李雅普诺夫方法的重要理论基础。
该定理表明,如果系统的李雅普诺夫函数存在并且连续可导,并且李雅普诺夫函数的导数满足一定的条件,则系统是渐近稳定的。
这个定理为李雅普诺夫方法的应用提供了重要的理论依据。
总之,稳定性与李雅普诺夫方法是控制理论中基础且重要的概念。
第4章稳定性与李雅普诺夫方法稳定性是评估一个系统的重要性能指标,它描述了系统在一定初始条件下是否能够保持其平衡状态。
稳定性分为两种类型,即渐近稳定性和有界稳定性。
渐近稳定性指的是系统随着时间的推移趋向于其中一平衡状态,而有界稳定性指的是系统在任意时刻的状态都保持在其中一有界范围内。
为了评估系统的稳定性,我们可以利用李雅普诺夫方法。
李雅普诺夫方法是一种通过构造李雅普诺夫函数来判断系统稳定性的方法。
李雅普诺夫函数是一个满足特定条件的函数,它的导数反映了系统状态变化的趋势。
通过对李雅普诺夫函数的导数进行分析,我们可以判断系统在任意时刻的状态是否会向着平衡状态演进。
在利用李雅普诺夫方法进行稳定性分析时,通常需要满足以下条件:1.李雅普诺夫函数必须是正定函数,并且在系统的平衡点上取得最小值。
2.李雅普诺夫函数的导数必须是负定函数,即在系统的平衡点附近的任意一点,李雅普诺夫函数的导数都小于等于零。
如果满足以上条件,那么系统就是渐近稳定的。
反之,如果李雅普诺夫函数的导数是正定函数,那么系统就是不稳定的。
除了判断系统的稳定性外,李雅普诺夫方法还可以用于定量的稳定性分析。
通过分析李雅普诺夫函数的导数的大小,我们可以得到系统状态变化的速度。
如果李雅普诺夫函数的导数越小,那么系统的稳定性就越好。
反之,如果李雅普诺夫函数的导数越大,那么系统的稳定性就越差。
在实际应用中,李雅普诺夫方法广泛应用于控制系统、电路系统和机械系统等领域。
通过利用李雅普诺夫方法进行稳定性分析,我们可以评估系统的稳定性,并对系统进行控制,以保持系统的稳定状态。
总之,稳定性是一个评估系统性能的重要指标,通过利用李雅普诺夫方法可以判断系统的稳定性,并定量地分析系统的稳定性。
李雅普诺夫方法在控制系统、电路系统和机械系统等领域有广泛的应用前景。