一阶惯性环节
- 格式:doc
- 大小:40.00 KB
- 文档页数:6
中央民族大学信息工程学院计算机控制技术综合设计实验报告学生姓名:学号:指导教师:实验地点:实验名称:加热炉系统温度控制器设计目录一、设计题目及要求 (4)二、设计方案与结构图 (4)1、计算机控制系统结构图 (4)2、硬件结构图 (5)三、电路硬件设计 (6)1、电桥电路 (6)2、放大环节 (7)3、滤波电路 (7)4、A/D转换器 (8)5、D/A 转换电路 (9)四、参数计算及仿真 (10)1、0θ=时数字调节器D (z )的实现 (10)a 、无控制作用下系统伯德图 ....................................................................................... 10 b 、最少拍下调节器函数 ............................................................................................... 12 C 、最少拍下系统伯德图 ............................................................................................... 14 d 、单位阶跃响应下系统输出 ....................................................................................... 15 e 、施加阶跃干扰信号 ................................................................................................... 17 f 、施加随机信号影响.................................................................................................... 19 2、/20.374T θ==时数字调节器D (z )的实现 . (20)a 、无控制作用下系统伯德图 ....................................................................................... 20 b 、达林算法下调节器函数 ........................................................................................... 23 C 、达林算法下系统伯德图(未加增益) ................................................................... 25 d 、达林算法下系统伯德图(加增益) ....................................................................... 26 e 、单位阶跃响应下系统输出 ....................................................................................... 28 f 、施加阶跃干扰信号.................................................................................................... 29 g 、施加随机信号影响 (30)五、心得与体会 (32)一、设计题目及要求1、 针对一个具有纯滞后的一阶惯性环节()1sKe G s Ts τ-=+的温度控制系统和给定的系统性能指标:✧ 工程要求相角裕度为30°~60°,幅值裕度>6dB✧ 要求测量范围-50℃~200℃,测量精度0.5%,分辨率0.2℃2、 书面设计一个计算机控制系统的硬件布线连接图,并转化为系统结构图;3、 选择一种控制算法并借助软件工程知识编写程序流程图;4、 用MATLAB 和SIMULINK 进行仿真分析和验证;对象确定:K=10*log(C*C -sqrt(C)),rand(‘state ’,C),T=rang(1), 考虑θ=0或T/2两种情况。

目录一课程设计内容任务 (3)二对课设任务的解读 (3)三系统结构模型框图 (3)四各部分程序流程图 (4)五数字控制器设计 (5)六系统仿真 (6)七抗干扰性分析 (11)八硬件设计 (13)九系统设计硬件元素选型 (14)十心得体会.............................................................................. 16 十一参考文献 (16)附硬件设计图一、课程设计内容任务1、针对一个具有大纯时延时间的一阶惯性环节 (G(s=K*e-θs/(Ts+1温度控制系统和给定的系统性能指标, (工程要求相角裕度为 30~60,幅值裕度 >6dB;要求测量范围 -50℃~ 200℃,测量精度 0.5%,分辨率 0.2℃;2、书面设计一个计算机控制系统的硬件布线连接图,并转化为系统结构图;3、选择一种控制算法并借助软件工程知识编写程序流程图;4、用 MATLAB 和 SIMULINK 进行仿真分析和验证;K=10*log(C*C-sqrt(C,rand(‘state’,C,T=rand(1, θ=0或 T/2, C 为学号的后 3位数,如:C=325, K=115.7, T=0.9824, θ=0或 0.4912;5、进行可靠性和抗干扰性的分析;6、书写设计体会和心得。
二、对课设任务的理解和分析1、该任务是针对一个特定的控制对象进行可靠性和稳定性控制,选取实际生活中常见的温度为控制对象;2、该任务只需要一个控制对象,进行可靠性和抗干扰性分析时设定随机干扰量, 观察仿真图形和性能,故可以选取简单回路控制系统模型进行设计;3、硬件设计过程采取分步设计,由局部到整体,主要有温度检测模块、输入通道部分、输出通道部分、接口扩展部分、晶振和复位电路模块、调压触发电路、数码管显示等; 4、取θ= T/2, 大纯时延系统的控制算法有多种,根据其特定性能,本设计在 PID 算法和达林算法之间权衡之后做出选择,最终采用达林控制算法来实现系统控制,取期望闭环传递函数 H(s,求解出数字控制器 D(z及其差分方程;5、编写程序流程图,采取正确的思路和方法,包括主程序流程图、 8155初始化、滤波、键盘输入、达林算法、延时等;6、仿真分析和验证过程采用 MATLAB 和 SIMULINK 实现,主要针对仿真性能调节系统参数, 并结合典型输入信号的随机干扰进行可靠性、稳定性和抗干扰性分析。

实验三、典型环节的频率特性测量一、实验目的1.学习和掌握测量典型环节的频率特性曲线的方法和机能。
2.学习根据实验所得频率特性曲线求取传递函数的方法。
二、实验内容1.实验法完成一阶惯性环节的频率特性曲线测试。
2.实验法完成典型二阶系统开环频率特性曲线测试。
3.根据所得频率特性曲线求取各自的传递函数。
4.软件仿真法求取一阶惯性环节频率特性和典型二阶系统开环频率特性,与实验结果比较。
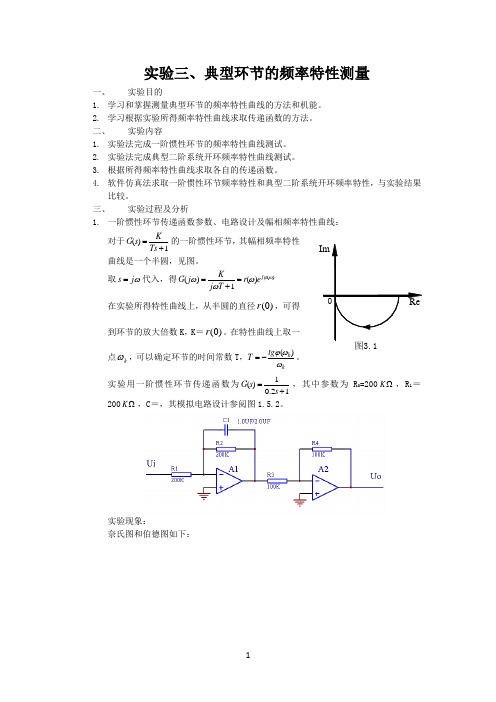
三、1.对于1)(+=TssG的一阶惯性环节,取ωjs=1ωTj=+=点kω,kω-。
12.0+=s 200KΩ实验现象:奈氏图和伯德图如下:理想的伯德图的幅相曲线如下:由于系统是一阶惯性环节,传递函数可以写成K/squrt (T^2w^2+1)可知奈氏图的2. 12)1)(1()(22++=++=Ts s T s T s T s G ξ 图3.3.1)(22)(12)(ωϕωωξωωj er T j T K j G =++-=二阶系统开环传递函数的幅相频率特性曲线,图3.2.1所示。
根据上述幅相频率特性表达式,有 )0(r K = (3—1) kk k tg T r r φωξω2112)0()(+=其中 ωξωφT T tg kk 21122-= 故有 kk ktg TT φωξω2122-=kk k tg r r T φωωξ211)()0(2+= (3—3)如已测得二阶环节的幅相频率特性,则(0)r 、k ω、k φ和()k r ω均可从实验曲线得到,于是可按式(3—1)、(3—2)和(3—3)计算K 、T 、ξ,并可根据计算所得T 、ξ 求取T 1和T 21(21-+=ξξT T 、1(22--=ξξT T实验用典型二阶系统开环传递函数为:13.002.01)11.0)(12.0(1)()(2++=++=s s s s s H s G 其电路设计参阅图3.2.2。
实验现象及分析:图3.2.2二阶环节的存在两个转折点,相角变化范围有180度,所以在奈氏图的高频段出现在虚轴的左半部分,当高频时,赋值趋向于0.二阶的伯德图可以看粗在w=5的时和w=10时出现两次的转折。
目录一课程设计内容任务,,,,,,,,, ,,,,,,, ,,,,,,二对课设任务的解读,,,,,,,,, ,,,,,,, ,,,,,, 3三系统结构模型框图,,,,,,,,, ,,,,,,, ,,,,,, 3四各部分程序流程图,,,,,,,,, ,,,,,,, ,,,,,, 4五数字控制器设计,,,,,,,,,,,, ,,,,,,, ,,, 5六系统仿真,,,,,,,,,,,,,,,,,,,,,,,,,, 6七抗干扰性分析,,,,,,,,,,,,,,,,,,,,,,,, 11八硬件设计,,,,,,,,,,,,,,,,,,,,,,,,,, 13九系统设计硬件元素选型,,,,,,,,,,,,,,,,,,,, 14十心得体会,,,,,,,,,,,,,,,,,,,,,,,,,, 16 十一参考文献,,,,,,,,,,,,,,,,,,,,,,,,, 16附硬件设计图一、课程设计内容任务1、针对一个具有大纯时延时间的一阶惯性环节(G(s=K*e- θs/(Ts+1温度控制系统和给定的系统性能指标, (工程要求相角裕度为30~60,幅值裕度>6dB;要求测量范围-50℃~ 200℃ ,测量精度0.5%,分辨率0.2℃ ;2、书面设计一个计算机控制系统的硬件布线连接图,并转化为系统结构图;3、选择一种控制算法并借助软件工程知识编写程序流程图;4、用MATLAB 和SIMULINK 进行仿真分析和验证K=10*log(C*C- sqrt(C,rand( ‘ state ' ,C,T=ran或d(1 T, /2, Cθ 为=0学号的后3位数, 如:C=325, K=115.7, T=0.9824, θ或= 0.4912;5、进行可靠性和抗干扰性的分析;6、书写设计体会和心得。
二、对课设任务的理解和分析1、该任务是针对一个特定的控制对象进行可靠性和稳定性控制,选取实际生活中常见的温度为控制对象;2、该任务只需要一个控制对象,进行可靠性和抗干扰性分析时设定随机干扰量, 观察仿真图形和性能,故可以选取简单回路控制系统模型进行设计;3、硬件设计过程采取分步设计,由局部到整体,主要有温度检测模块、输入通道部分、输出通道部分、接口扩展部分、晶振和复位电路模块、调压触发电路、数码管显示等;4、取θ= T/2,大纯时延系统的控制算法有多种,根据其特定性能,本设计在PID 算法和达林算法之间权衡之后做出选择,最终采用达林控制算法来实现系统控制,取期望闭环传递函数H(s,求解出数字控制器D(z 及其差分方程;5、编写程序流程图,采取正确的思路和方法,包括主程序流程图、8155 初始化、滤波、键盘输入、达林算法、延时等;6、仿真分析和验证过程采用MATLAB 和SIMULINK 实现,主要针对仿真性能调节系统参数, 并结合典型输入信号的随机干扰进行可靠性、稳定性和抗干扰性分析。
实验三 典型环节(或系统)的频率特性测量一.实验目的1.学习和掌握测量典型环节(或系统)频率特性曲线的方法和技能。
2.学习根据实验所得频率特性曲线求取传递函数的方法。
二.实验内容1.用实验方法完成一阶惯性环节的频率特性曲线测试。
2.用实验方法完成典型二阶系统开环频率特性曲线的测试。
3.用软件仿真方法求取一阶惯性环节频率特性和典型二阶系统开环频率特性,并与实验所得结果比较。
三、实验原理及说明1.实验用一阶惯性环节传递函数参数、电路设计及其幅相频率特性曲线:对于1)(+=Ts Ks G 的一阶惯性环节,其幅相频率特性曲线是一个半圆,见图3.1。
取ωj s =代入,得)()(1)(ωϕωωωj e r T j Kj G =+=(3-2-1)在实验所得特性曲线上,从半园的直径(0)r ,可得到环节的放大倍数K ,K =(0)r 。
在特性曲线上取一点k ω,可以确定环节的时间常数T ,kk tg T ωωϕ)(-=。
(3-2-2)实验用一阶惯性环节传递函数为12.01)(+=s s G ,其中参数为R 0=200K Ω,R 1=200K Ω,C=1uF ,参数根据实验要求可以自行搭配,其模拟电路设计参阅下图3.2。
在进行实验连线之前,先将U13单元输入端的100K 可调电阻顺时针旋转到底(即调至最大),使输入电阻R 0的总阻值为200K;其中,R1、C1在U13单元模块上。
U8单元为反相器单元,将U8单元输入端的10K 可调电阻逆时针旋转到底(即调至最小),使输入电阻R 的总值为10K;注明:所有运放单元的+端所接的100K 、10K 电阻均已经内部接好,实验时不需外接。
图3.22.实验用典型二阶系统开环传递函数参数、电路设计及其幅相频率特性曲线:对于由两个惯性环节组成的二阶系统,其开环传递函数为12)1)(1()(2221++=++=Ts s T Ks T s T K s G ξ )1(≥ξ 令上式中 s j ω=,可以得到对应的频率特性 )(22)(12)(ωϕωωξωωj e r T j T Kj G =++-=二阶系统开环传递函数的幅相频率特性曲线,如图所示。
【自动控制原理经典考试题目整理】第五章-第六章自动控制原理经典考试题目整理第五章-第六章第五章频率分析法1.线性定常系统在正弦信号输入时,稳态输出与输入的相位移随频率而变化的函数关系称为__________。
2.积分环节的幅相频率特性图为;而微分环节的幅相频率特性图为。
3.一阶惯性环节G(s)=1/(1+T s) 的相频特性为ψ(ω)=__ _____________,比例微分环节G(s)=1+T s的相频特性为ψ(ω)=_____ __________。
4.常用的频率特性图示方法有极坐标图示法和__________图示法。
5.频率特性的极坐标图又称_____________图。
6.利用代数方法判别闭环控制系统稳定性的方法有____________和赫尔维茨判据两种。
7.设系统的频率特性为,则称为。
8.ω从0变化到+∞时,惯性环节的频率特性极坐标图在___________象限,形状为___________圆。
9.频率特性可以由微分方程或传递函数求得,还可以用___________方法测定。
10.0型系统对数幅频特性低频段渐近线的斜率为______dB/dec,高度为20lgKp。
11.型系统极坐标图的奈氏曲线的起点是在相角为______的无限远处。
12.积分环节的对数幅频特性曲线是一条直线,直线的斜率为_______dB/dec。
13.惯性环节G(s)=1/(Ts+1)的对数幅频渐近特性在高频段范围内是一条斜率为-20dB /dec,且与ω轴相交于ω=_______________的渐近线。
14.设积分环节的传递函数为G(s)=K/s,则其频率特性幅值M(ω)=()A. K/ω B. K/ω2 C.1/ω D. 1/ω215.ω从0变化到+∞时,迟延环节频率特性极坐标图为()A.圆B.半圆 C.椭圆 D.双曲线16.二阶振荡环节的相频特性ψ(ω),当时ω→ ∞ ,其相位移ψ(ω)为( )A .-270°B .-180°C .-90°D .0°17.某校正环节传递函数Gc(s)= ,则其频率特性的奈氏图终点坐标为()A.(0,j0)B.(1,j0)C.(1,j1)D.(10,j0)18.利用奈奎斯特图可以分析闭环控制系统的()A.稳态性能B.动态性能 C.稳态和动态性能 D.抗扰性能19.若某系统的传递函数为G(s)= K/(Ts+1) ,则其频率特性的实部R(ω)是() A . B .- C . D .-20.设某系统开环传递函数为G(s)= ,则其频率特性奈氏图起点坐标为( )A .(-10,j0)B .(-1,j0)C .(1,j0)D .(10,j0)21.设微分环节的频率特性为G(j ω) ,当频率ω从0变化至∞时,其极坐标平面上的奈氏曲线是()A .正虚轴B .负虚轴C .正实轴D .负实轴22.设某系统的传递函数G(s)=10/(s+1),则其频率特性的实部()A .B .C . D.23.设惯性环节的频率特性为G(j ω)=10/(j ω+1) ,当频率ω从0变化至∞时,则其幅相频率特性曲线是一个半圆,位于极坐标平面的()A .第一象限B .第二象限C .第三象限D .第四象限1101100++s s 221T Kω+221T K ω+T K ω+1TK ω+1)1)(10(102+++s s s 2110ω+2110ω+-T ω+110T ω+-1101020.设某系统开环传递函数为G(s)= ,则其频率特性奈氏图起点坐标为( )A .(-10,j0)B .(-1,j0)C .(1,j0)D .(10,j0)21.设微分环节的频率特性为G(j ω) ,当频率ω从0变化至∞时,其极坐标平面上的奈氏曲线是()A .正虚轴B .负虚轴C .正实轴D .负实轴22.设某系统的传递函数G(s)=10/(s+1),则其频率特性的实部()A .B .C .D .23.设惯性环节的频率特性为G(j ω)=10/(j ω+1) ,当频率ω从0变化至∞时,则其幅相频率特性曲线是一个半圆,位于极坐标平面的()A .第一象限B .第二象限C .第三象限D .第四象限24.2型系统对数幅频特性的低频段渐近线斜率为()A .-60dB /dec B .-40dB /decC .-20dB /decD .0dB /dec25.1型系统开环对数幅频渐近特性的低频段斜率为()A.-40(dB/dec)B.-20(dB/dec)C.0(dB/dec)D.+20(dB/dec)26.已知某单位负反馈系统的开环传递函数为G(s)=,则相位裕量γ的值为()A .30°B .45°C .60°D .90°27.设二阶振荡环节的传递函数G (s )= ,则其对数幅频特性渐近线的转角频率为()A .2rad/sB .4rad/sC .8rad/sD .16rad/s2110ω+2110ω+-T ω+110T ω+-110)1(24+s s 164162++s s 10)(=s Y28.设某闭环传递函数为,则其频带宽度为()A.0~10rad/s B.0~5rad/s C.0~1rad/s D.0~0.1rad /s第六章线性系统的校正1.滞后校正装置最大滞后角的频率= 。