无刷直流电机换相波形(详细解读)
- 格式:pdf
- 大小:709.60 KB
- 文档页数:1

无刷电机反电动势波形
无刷电机是一种常见的电动机类型,其特点是无需使用碳刷与旋转子接触,从而减少了摩擦和磨损。
在无刷电机中,反电动势是一个重要的概念,它对电机的性能和运行特性有着重要的影响。
反电动势是指在电机运行时,由于电机的旋转而在电机绕组中产生的电势。
它的波形可以用来分析电机的工作状态和性能。
在无刷电机中,反电动势的波形通常是一个正弦波或近似正弦波。
反电动势的波形与电机的转速和负载有关。
当电机转速较低或负载较大时,反电动势的幅值较小;而当电机转速较高或负载较小时,反电动势的幅值较大。
这是因为在低转速或大负载情况下,电机需要较大的电流来产生足够的转矩,从而降低了反电动势的幅值;而在高转速或小负载情况下,电机需要较小的电流来产生足够的转矩,从而提高了反电动势的幅值。
反电动势的波形还可以用来判断电机的运行状态。
例如,当电机处于空载状态时,反电动势的波形应该是一个纯正弦波;而当电机承受较大负载时,反电动势的波形可能会出现畸变或扭曲。
无刷电机的反电动势波形对电机控制和调节也有着重要的意义。
通过对反电动势波形的分析,可以确定电机的转速和负载情况,从而实现对电机的精确控制。
例如,在无刷直流电机控制系统中,可以通过测量反电动势的波形来实现闭环控制,从而使电机能够按照预
定的转速和负载要求进行运行。
无刷电机的反电动势波形是评估电机性能和运行状态的重要指标。
通过对反电动势波形的分析,可以了解电机的转速、负载和控制情况,从而实现对电机的精确控制和调节。
无刷电机的反电动势波形研究对于电机领域的发展和应用具有重要的意义。
1、引言你希望在你的新产品中使用无刷伺服电机吗?平时,我们可能也常碰到一些关键词,例如“梯形波式”,“正弦波式”和“矢量控制”。
只有当你了解了他们的真正含义,才能在你的新设计中选择正确的产品。
在过去的十年甚至二十年中,伺服电机市场已经从有刷伺服转变成无刷伺服的市场,这主要是由无刷伺服的低维修率和高稳定性所决定的。
在这十几年中,驱动部分在电路和系统方面的技术已发展的非常完善。
控制方式也已经完全可以实现那些关键词所描述的功能。
大部分的高性能的伺服系统都采用一个内部控制环来控制力矩。
这个内部的力矩环通过和外部的速度环和位置环的配合以达到不同的控制效果。
外部控制环的设计是与匹配的电机没有关系的,而内部的力矩环的设计则与所匹配的电机的性能息息相关。
有刷电机的力矩控制是非常简单的,因为有刷电机自身可完成换相工作。
所输出的力矩是和有刷电机两极输入的直流电压成正比的。
力矩也可通过P-I控制回路轻松地得到控制。
P-I控制回路的主要功能就是通过检测电机实际电流和控制电流之间的偏差,实时地调整电机的输入电压。
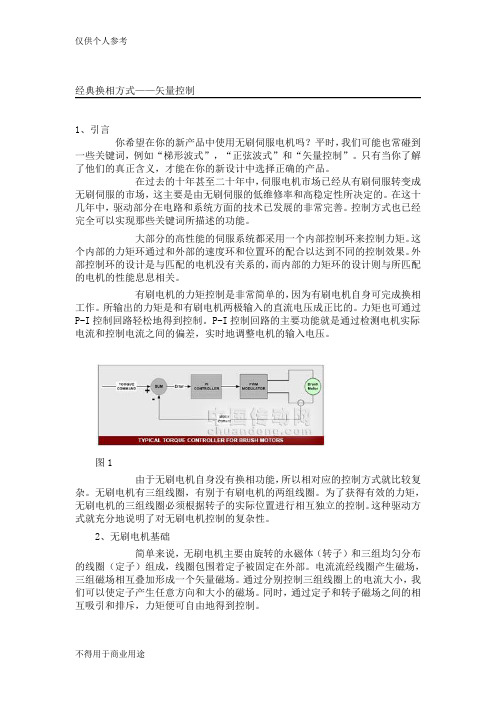
图1由于无刷电机自身没有换相功能,所以相对应的控制方式就比较复杂。
无刷电机有三组线圈,有别于有刷电机的两组线圈。
为了获得有效的力矩,无刷电机的三组线圈必须根据转子的实际位置进行相互独立的控制。
这种驱动方式就充分地说明了对无刷电机控制的复杂性。
2、无刷电机基础简单来说,无刷电机主要由旋转的永磁体(转子)和三组均匀分布的线圈(定子)组成,线圈包围着定子被固定在外部。
电流流经线圈产生磁场,三组磁场相互叠加形成一个矢量磁场。
通过分别控制三组线圈上的电流大小,我们可以使定子产生任意方向和大小的磁场。
同时,通过定子和转子磁场之间的相互吸引和排斥,力矩便可自由地得到控制。
图2对于转子旋转的任意角度,定子都存在着一个最优化的磁场方向,能产生最大的力矩;同样,定子也能产生一个无力矩输出的磁场方向。
简单地说,如果定子生成的磁场和转子永磁体的磁场方向一致,电机就不会输出任何力矩。

直流无刷电机的正弦波控制传统的直流无刷电机采用方波控制方式,控制简单,容易实现,同时存在转矩脉动、换相噪声等问题,在一些对噪声有要求的应用领域存在局限性。
针对这些应用,采用正弦波控制可以很好的解决这个问题。
直流无刷电机的正弦波控制简介直流无刷电机的正弦波控制即通过对电机绕组施加一定的电压,使电机绕组中产生正弦电流,通过控制正弦电流的幅值及相位达到控制电机转矩的目的。
与传统的方波控制相比,电机相电流为正弦,且连续变化,无换相电流突变,因此电机运行噪声低。
根据控制的复杂程度,直流无刷电机的正弦波控制可分为:简易正弦波控制与复杂正弦波控制。
(1)简易正弦波控制:对电机绕组施加一定的电压,使电机相电压为正弦波,由于电机绕组为感性负载,因此电机相电流也为正弦波。
通过控制电机相电压的幅值以及相位来控制电流的相位以及幅值,为电压环控制,实现较为简单。
(2)复杂正弦波控制:与简易正弦波控制不同,复杂的正弦控制目标为电机相电流,建立电流环,通过直接控制相电流的相位与幅值达到控制电机的目的。
由于电机相电流为正弦信号,因此需要进行电流的解耦操作,较为复杂,常见的为磁场定向控制(FOC)及直接转矩控制(DTC)等。
本文将主要介绍简易正弦波控制的原理及其实现。
简易正弦波控制原理简易正弦波控制即通过控制电机正弦相电压的幅值以及相位达到控制电机电流的目的。
通常通过在电机端线施加一定形式的电压来使绕组两端产生正弦相电压。
常见的生成方式为:正弦PWM以及空间矢量PWM。
由于正弦PWM原理简单且便于实现,因此简易正弦波控制中通常采用其作为PWM生成方式。
图1为BLDC控制结构图,其中Ux、Uy、Uz为桥臂电压,Ua、Ub、Uc为电机绕组的相电压,以下对于不同种类的PWM调制方式的介绍将基于此结构图进行。
图1 直流无刷电机控制框图(1)三相正弦调制PWM三相SPWM为最常见的正弦PWM生成方式,即对电机三个端线施加相位相差120度的正弦电压信号,由于中性点为0,因此电机相电压也为正弦,且相位与施加的正弦电压相同。

书山有路勤为径;学海无涯苦作舟
无刷直流电机(BLDC)构成及工作原理详解(附部
分生产厂家)
无刷直流电机(BLDC)是永磁式同步电机的一种,而并不是真正的直流电机,英文简称BLDC。
区别于有刷直流电机,无刷直流电机不使用机械的电刷装置,采用方波自控式永磁同步电机,以霍尔传感器取代碳刷换向器,以钕铁硼作为转子的永磁材料,性能上相较一般的传统直流电机有很大优势,是当今最理想的调速电机。
一、有刷直流电机简介
介绍无刷直流电机之前,我们来看看有刷电机:
直流电机以良好的启动性能、调速性能等优点着称,其中属于直流电机
一类的有刷直流电机采用机械换向器,使得驱动方法简单,其模型示意图如下图所示。
直流电机模型示意图
DC电机(有刷电机)的运转示意图
电机主要由永磁材料制造的定子、绕有线圈绕组的转子(电枢)、换
向器和电刷等构成。
只要在电刷的A和B两端通入一定的直流电流,电机的换向器就会自动改变电机转子的磁场方向,这样,直流电机的转子就会持续运转下去。
专注下一代成长,为了孩子。

bldc电机反电动势波形
【最新版】
目录
1.BLDC 电机概述
2.BLDC 电机的反电动势波形
3.BLDC 电机反电动势波形的应用
4.总结
正文
一、BLDC 电机概述
BLDC 电机,全称为 Brushless Direct Current Motor,即无刷直流电机。
它是一种采用直流电源驱动,永磁材料作为转子磁极的电机。
与传统的有刷直流电机相比,BLDC 电机具有更高的效率、更低的噪音和更长的寿命。
因此,在近年来,BLDC 电机在家电、工业自动化、电动汽车等领域得到了广泛的应用。
二、BLDC 电机的反电动势波形
BLDC 电机的反电动势波形,也称为逆电动势波形,是指电机转子旋转时,电机线圈中产生的电动势波形。
这个波形是交流波形,其频率等于电机的同步频率。
根据电机的运行状态和换相策略,BLDC 电机的反电动势波形可以分为以下几种:
1.星形接法反电动势波形
2.三角形接法反电动势波形
3.两种接法下的反电动势波形对比
三、BLDC 电机反电动势波形的应用
BLDC 电机的反电动势波形在实际应用中具有重要意义。
它可以用于:
1.检测电机的运行状态
2.判断电机的换相时刻
3.实现无刷直流电机的矢量控制
4.提高电机的效率和性能
四、总结
BLDC 电机的反电动势波形是电机运行过程中产生的一种交流电动势波形。
它可以用于检测电机的运行状态,判断电机的换相时刻,实现无刷直流电机的矢量控制,从而提高电机的效率和性能。

无刷电机的换相
无刷电机的换相是指通过控制电流的方向来实现电机转子上的磁力线方向和电流方向的匹配,从而实现电机的运转。
无刷电机的换相有两种常用的方法:传感器换相和传感器无换相。
1. 传感器换相:
传感器换相是利用传感器来检测电机转子的位置,从而确定如何切换电流的方向。
常见的传感器包括霍尔传感器和光电编码器等。
传感器通过监测转子位置,向控制器提供反馈信号,控制器根据这些信号来切换电流的方向,使电机正常运行。
传感器换相的优点是精度较高,但需要额外的传感器装置。
2. 传感器无换相:
传感器无换相是利用无传感器检测方法,通过观察电机转子上的自感电势变化来判断电流的方向。
主要有三种无传感器换相控制方法:反电动势检测法、电阻梯度检测法和费曼(Back EMF)检测法。
这些方法都是通过观察电机转子上的自感电
势信号的变化,来确定电流的方向,并控制电流的切换。
传感器无换相的优点是不需要额外的传感器装置,但精度相对较低。
总结起来,无刷电机的换相可以通过传感器换相或传感器无换相的方法来实现,具体选择哪种方法取决于应用的需求和成本等因素。