无刷直流电机运行原理与基本控制方法..
- 格式:ppt
- 大小:2.67 MB
- 文档页数:49
直流无刷电机的foc控制原理直流无刷电机(BLDC)的矢量控制通常采用场向量控制(Field Oriented Control,FOC)技术。
FOC 控制可以通过控制电机的磁场方向和大小,以实现更高的效率和性能。
以下是直流无刷电机 FOC 控制的基本原理:
坐标变换:FOC 控制首先将电机的三相电流转换到两个坐标系下:静止坐标系(通常是 abc 坐标系)和转子坐标系(通常是 dq 坐标系)。
dq 坐标系转换:在 dq 坐标系中,d 轴(直流轴)与电机的磁通量方向保持一致,q 轴(正交轴)与磁场垂直。
这种变换可以简化电机的控制,因为电机的磁通量和转矩只与 d 轴电流有关,而与q 轴电流无关。
磁通量和转矩控制:在 dq 坐标系下,可以独立控制 d 轴电流和 q 轴电流。
通过控制 d 轴电流来控制电机的磁通量,通过控制q 轴电流来控制电机的转矩。
这样就可以实现对电机磁通量和转矩的精确控制。
转子位置估算:FOC 控制需要知道转子的位置信息才能进行有效的控制。
通常,这需要使用传感器(如编码器)来获取准确的转子位置信息,或者采用无传感器的方法来估算转子位置(如反电动势法或者观测器法)。
闭环控制:通常情况下,FOC 控制是以闭环方式实现的,通过反馈转子位置信息和电流信息来调节控制算法,以确保电机可以跟
踪给定的磁通量和转矩指令。
总的来说,FOC 控制通过将电机的控制问题简化到一个二维空间中(d 轴和 q 轴),从而实现对电机磁通量和转矩的精确控制,从而提高了电机的效率和性能。
直流无刷电动机工作原理与控制方法直流无刷电动机(Brushless DC Motor,简称BLDC)是一种基于电磁力作用实现机械能转换的电机。
与传统的有刷直流电动机相比,BLDC 电机不需要传统的用于换向的有刷子和槽型换向器,具有寿命长、效率高和维护方便等优点。
BLDC电机广泛应用于工业自动化、电动车辆、航空航天等领域。
BLDC电动机的工作原理如下:1.结构组成:BLDC电动机主要由转子、定子和传感器组成。
2.定子:定子是由硅钢片叠压而成,上面布置有若干个线圈,通电后产生磁场。
3.转子:转子上布置有磁铁,组成多个极对,其中每个极对由两个磁体构成。
4.传感器:BLDC电机中通常搭配有霍尔传感器或者编码器,用于检测转子位置,实现无刷电机的精确控制。
BLDC电动机的控制方法如下:1.转子位置检测:通过霍尔传感器或编码器检测转子位置,以便控制电机的相电流通断和电流方向。
2.电流控制:根据转子位置信息,利用控制算法控制电机的相电流,将电流引导到正确的相位上以实现电机的转动。
3.电压控制:根据电机转速需求,控制电机的进给电压,调整电机转速。
4.速度控制:通过调整电机的进给电压和相电流,使电机达到所需的速度。
5.扭矩控制:通过控制电机的相电流大小,控制电机的输出扭矩。
BLDC电机的控制可以分为开环控制和闭环控制两种方式:1.开环控制:根据电机的数学模型和控制算法,在事先给定的速度范围内,根据转子位置信息和电机参数计算出合适的相电流和电压进行控制。
开环控制简单,但无法实现高精度的转速和位置控制。
2.闭环控制:通过传感器实时检测转子位置和速度,在控制算法中进行比较,调整相电流和电压,使电机输出所需的速度和扭矩。
闭环控制可以实现高精度的转速和位置控制,但相对于开环控制,需要更多的硬件和软件支持。
总结起来,BLDC电动机通过转子位置检测和电流控制实现高精度的转速和位置控制。
在控制方法上,可以采用开环控制或闭环控制,根据具体应用的需求选择合适的控制方式。
bldc控制原理BLDC(无刷直流电机)控制是现代电机控制领域的一个热门话题。
这种电机的控制被广泛应用于家用电器、无人机、自动化设备等自动控制系统中。
本文将介绍BLDC电机的基本工作原理和控制策略。
BLDC电机的工作原理通常,BLDC电机由永磁体、转子、驱动电子器件和控制电路组成。
永磁体通常位于电机的外部并固定在定子上,而转子则包含一组绕在铁芯上的绕组。
当这些绕组被激励时,它们产生一个磁场,这个磁场与永磁体产生的磁场相互作用,从而导致电机转动。
BLDC电机有三个绕组,分别称为A、B和C绕组。
这些绕组放置在定子上,并与转子上的磁极相交。
在运行时,BLDC电机通过不断交替激活这三个绕组中的一组或多组来实现转子旋转。
这个过程需要一个特殊的控制器,它根据电机的运转状态和需求来控制三个绕组的激励。
控制BLDC电机的策略要控制BLDC电机的旋转,需要将控制信号发送给电机控制器。
这个信号可以是数字脉冲宽度调制(PWM)信号。
此外,还需要描述BLDC电机的状态和控制策略的控制器。
常用的控制策略包括:1.交替相邻的绕组:这种控制策略是最简单的,并且可以实现BLDC 电机的高速运行。
在此策略中,只有两个相邻的绕组被同时激活,并且在接下来的时间段内分别切换。
2.正/反向旋转:在这种控制策略中,控制器可以发送一个指示电机正向旋转或反向旋转的信号。
当要逆转电机的方向时,需要改变绕组的激励顺序。
3.按需交替绕组:这种控制策略基于电机负载和应用需求。
控制器可以根据电机的负载发出不同的交替激励顺序信号。
这种方法可以实现电机的低功耗运行和更高的能效。
总结BLDC电机控制是现代电机控制领域的一个重要课题。
它可以通过不同的控制策略来实现高效的转动和负载适应性。
随着新技术的不断进步,BLDC电机控制也将得到更精细和高效的改进,从而在未来的自动化、航空航天、医疗等领域展现出更多的应用价值。
无刷直流电机运行原理与基本控制方法无刷直流电机(Brushless DC Motor,BLDC)是一种采用电子换向器来实现转子绕组换向的直流电机。
相比传统的有刷直流电机,在控制系统和效率方面有很大的优势。
下面将详细介绍无刷直流电机的运行原理和基本控制方法。
运行原理:无刷直流电机的核心部件是转子,上面装有多个永磁体。
转子内的绕组通过电子换向器将电流应用到绕组上,从而产生旋转力。
电子换向器根据传感器反馈的位置信息,控制电流的输入,实现转子绕组的换向。
无刷直流电机根据电子换向器的类型可以分为传感器式和传感器无式两种。
传感器式无刷直流电机通过安装在转子上的霍尔传感器等位置传感器来监测转子位置,并将此信息反馈给电子换向器。
电子换向器根据转子位置信号,控制电机的相序和相电流,实现电机的转动。
传感器无式无刷直流电机则通过估计转子位置来进行控制,无需外部传感器。
在转子上安装的霍尔传感器被去除,由控制器利用电机的后电动势(back electromotive force, BEMF)信号来计算转子位置。
基本控制方法:1.电压控制:电压控制是最基本的控制方法,通过控制电压的大小和频率来改变电机的转速。
在电压控制模式下,电机的角速度和负载之间可通过非线性函数表达,反映了电机的特性。
这种控制方法简单易实现,适用于对转速要求不高的应用。
2.电流控制:电流控制是常用的无刷直流电机控制方法,通过控制电机的相电流大小和方向来实现转速和扭矩的控制。
电流控制可以实现电机的低速高扭矩输出,适用于需要精确控制扭矩输出的应用。
3.速度控制:速度控制是无刷直流电机常用的控制方法之一,通过控制电机绕组的电流来实现转速的控制。
在速度控制模式下,控制器根据转速反馈信号对电流进行调节,使电机保持设定的转速。
这种控制方法适用于需要稳定转速输出的应用。
除了以上三种基本控制方法外,还有一种称为“无刷伺服”(BLDS)的控制方法。
BLDS控制方法将电流控制和速度控制相结合,通过对电流和速度的双闭环控制,可以实现更高精度、更稳定的转速控制。
半导体器件应用网/news/190158_p2.html 无刷直流(BLDC)电机的构造原理及电源控制方案【大比特导读】无刷直流(Brushless Direct Current,BLDC)电机是一种正快速普及的电机类型,它可在家用电器、汽车、航空航天、消费品、医疗、工业自动化设备和仪器等行业中使用。
引言无刷直流 (Brushless Direct Current, BLDC)电机是一种正快速普及的电机类型,它可在家用电器、汽车、航空航天、消费品、医疗、工业自动化设备和仪器等行业中使用。
正如名称指出的那样, BLDC 电机不用电刷来换向,而是使用电子换向。
BLDC 电机和有刷直流电机以及感应电机相比,有许多优点。
其中包括:•更好的转速-转矩特性•快速动态响应•高效率•使用寿命长•运转无噪音•较高的转速范围此外,由于输出转矩与电机体积之比更高,使之在需要着重考虑空间与重量因素的应用中,大有用武之地。
在本应用笔记中,我们将详细讨论 BLDC 电机的构造、工作原理、特性和典型应用。
描述 BLDC 电机时常用术语的词汇表,请参见附录 B:“词汇表”。
构造和工作原理BLDC 电机是同步电机中的一种。
也就是说,定子产生的磁场与转子产生的磁场具有相同的频率。
BLDC 电机不会遇到感应电机中常见的“差频”问题。
BLDC 电机可配置为单相、两相和三相。
定子绕组的数量与其类型对应。
三相电机最受欢迎,使用最普遍。
本应用笔记主要讨论三相电机。
"BLDC 电机的定子由铸钢叠片组成,绕组置于沿内部圆周轴向开凿的槽中 (如图 3 所示)。
定子与感应电机的定子十分相似,但绕组的分布方式不同。
多数 BLDC 电机都有三个星型连接的定子绕组。
这些绕组中的每一个都是由许多线圈相互连接组成的。
在槽中放置一个或多个线圈,并使它们相互连接组成绕组。
沿定子圆周分布这些绕组,以构成均均匀分布的磁极。
有两种类型的定子绕组:梯形和正弦电机。
无刷直流电机运行原理与基本控制方法无刷直流电机(Brushless DC motor,BLDC)是一种通过电子器件进行电动势控制的电机。
它与传统的有刷直流电机相比,无需换向器,具有体积小、寿命长、效率高等优点。
本文将介绍无刷直流电机的运行原理以及基本控制方法。
无刷直流电机由定子和转子两部分组成。
定子部分是由若干个绕组组成的,每个绕组分别位于电机的不同位置上,并通过适当的方式连接到驱动电子装置上。
转子部分是一个由磁铁组成的旋转部件。
当绕组首先通电时,电流产生的磁场将影响转子上的磁铁,使其始终追随绕组的磁场运动。
由于转子上有多个磁铁,每个磁铁都可能受到不同的绕组的影响,因此能够实现高效的力矩输出。
1.传感器反馈控制:传感器反馈控制是一种常用的无刷直流电机控制方法。
这种方法通过在电机上安装霍尔传感器或编码器等反馈装置,实时获取电机的位置信息。
控制器根据这些信息,采用恰当的算法控制电机的相序和电流大小以使电机达到所需的速度和位置。
2.电子换向:电子换向是指通过改变电流的方向和大小来实现电机转子上的磁场方向的变化。
具体地,通过控制器引入恰当的电流波形,使得转子上的磁铁始终与绕组的磁场保持正交关系,从而实现电机的正常运转。
3.空载检测:空载检测是一种无刷直流电机常用的控制方法。
当电机不承受负载时,转子的转速会比正常情况下更高。
通过监测电机的转速,控制器可以判断电机是处于空载还是负载状态,并相应地调整电流的大小和方向,以达到所需的控制效果。
4.PID控制:PID控制是一种常用的控制方法,适用于无刷直流电机的速度和位置控制。
PID控制器根据电机的速度或位置误差计算出一个调整量,然后通过调整电流和相序来实现电机的控制。
PID控制器的输出可以根据需求进行调整,从而实现不同的电机运行模式。
总结无刷直流电机是一种通过电子器件进行电动势控制的电机,具有高效、寿命长等优点。
其运行原理是通过控制电流的大小和方向,使得转子上的磁铁与绕组的磁场保持正交关系,从而实现电机的正常运转。
For personal use only in study and research; not for commercial use直流无刷电动机工作原理与控制方法序言由于直流无刷电动机既具有交流电动机的结构简单、运行可靠、维护方便等一系列优点,又具备直流电动机的运行效率高、无励磁损耗以及调速性能好等诸多优点,故在当今国民经济各领域应用日益普及。
一个多世纪以来,电动机作为机电能量转换装置,其应用范围已遍及国民经济的各个领域以及人们的日常生活中。
其主要类型有同步电动机、异步电动机和直流电动机三种。
由于传统的直流电动机均采用电刷以机械方法进行换向,因而存在相对的机械摩擦,由此带来了噪声、火化、无线电干扰以及寿命短等弱点,再加上制造成本高及维修困难等缺点,从而大大限制了它的应用范围,致使目前工农业生产上大多数均采用三相异步电动机。
针对上述传统直流电动机的弊病,早在上世纪30年代就有人开始研制以电子换向代替电刷机械换向的直流无刷电动机。
经过了几十年的努力,直至上世纪60年代初终于实现了这一愿望。
上世纪70年代以来,随着电力电子工业的飞速发展,许多高性能半导体功率器件,如GTR、MOSFET、IGBT、IPM等相继出现,以及高性能永磁材料的问世,均为直流无刷电动机的广泛应用奠定了坚实的基础。
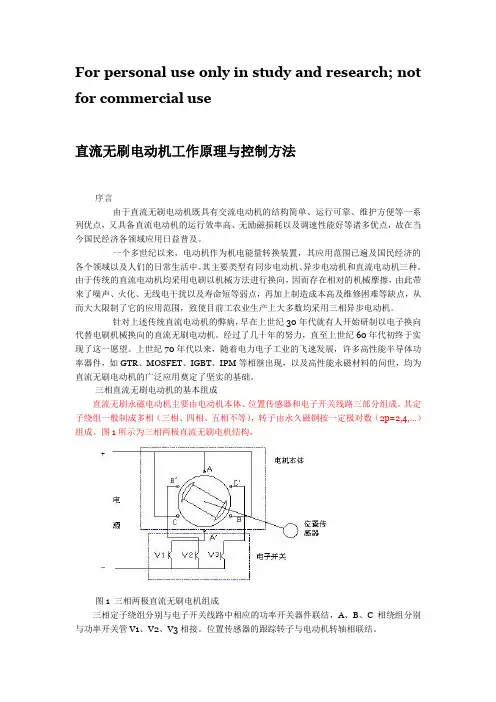
三相直流无刷电动机的基本组成直流无刷永磁电动机主要由电动机本体、位置传感器和电子开关线路三部分组成。
其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(2p=2,4,…)组成。
图1所示为三相两极直流无刷电机结构,图1 三相两极直流无刷电机组成三相定子绕组分别与电子开关线路中相应的功率开关器件联结,A、B、C相绕组分别与功率开关管V1、V2、V3相接。
位置传感器的跟踪转子与电动机转轴相联结。
当定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关线路,从而使定子各项绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相。
最全直流电机工作原理与控制电路解析(无刷+有刷+伺服+步进)直流电动机是连续的执行器,可将电能转换为(机械)能。
直流电动机通过产生连续的角旋转来实现此目的,该角旋转可用于旋转泵,风扇,压缩机,车轮等。
与传统的旋转直流电动机一样,也可以使用线性电动机,它们能够产生连续的衬套运动。
基本上有三种类型的常规电动机可用:AC 型电动机,(DC)型电动机和步进电动机。
典型的小型直流电动机交流电动机通常用于高功率的单相或多相(工业)应用中,需要恒定的旋转扭矩和速度来控制大负载,例如风扇或泵。
在本(教程)中,我们仅介绍简单的轻型直流电动机和步进电动机,这些电动机用于许多不同类型的(电子),位置控制,微处理器,(PI)C和(机器人)类型的电路中。
基本直流电动机该直流电动机或直流电动机,以给它的完整的标题,是用于产生连续运动和旋转,其速度可以容易地控制,从而使它们适合于应用中使用是速度控制,伺服控制类型的最常用的致动器,和/或需要定位。
直流电动机由两部分组成,“定子”是固定部分,而“转子”是旋转部分。
结果是基本上可以使用三种类型的直流电动机。
有刷(电机)–这种类型的电机通过使(电流)流经换向器和碳刷组件而在绕线转子(旋转的零件)中产生磁场,因此称为“有刷”。
定子(静止部分)的磁场是通过使用绕制的定子励磁绕组或永磁体产生的。
通常,有刷直流电动机便宜,体积小且易于控制。
无刷电动机–这种电动机通过使用附着在其上的永磁体在转子中产生磁场,并通过电子方式实现换向。
它们通常比常规的有刷型直流电动机更小,但价格更高,因为它们在定子中使用“霍尔效应”开关来产生所需的定子磁场旋转顺序,但是它们具有更好的转矩/速度特性,效率更高且使用寿命更长比同等拉丝类型。
伺服电动机–这种电动机基本上是一种有刷直流电动机,带有某种形式的位置反馈控制连接到转子轴。
它们连接到PWM型控制器并由其控制,主要用于位置(控制系统)和无线电控制模型。
普通的直流电动机具有几乎线性的特性,其旋转速度取决于所施加的直流电压,输出转矩则取决于流经电动机绕组的电流。
三相无刷直流电机驱动原理一、引言三相无刷直流电机是一种广泛应用于工业和家电领域的电机,其驱动原理是通过电子器件实现电机转子的控制和驱动。
本文将从三相无刷直流电机的基本结构、工作原理以及驱动器件的选择和控制方法等方面进行介绍。
二、三相无刷直流电机的基本结构三相无刷直流电机由转子、定子和传感器组成。
转子是由永磁体组成,定子则由三组线圈(A、B、C相)和磁铁组成。
传感器用于检测转子位置,通常采用霍尔元件或光电传感器。
三、三相无刷直流电机的工作原理三相无刷直流电机通过交替激励定子线圈,产生磁场,使转子转动。
其工作原理可以简单描述为以下几个步骤:1. 传感器检测转子位置:传感器会实时检测转子的位置,并将检测结果反馈给控制器。
2. 控制器计算相应的电流:根据传感器反馈的转子位置信息,控制器会计算出相应的电流值,并将电流信号发送给电机驱动器。
3. 电机驱动器控制电流:电机驱动器根据控制器发送的电流信号,控制电流的大小和方向,使电机产生适当的转矩。
4. 电机转子运动:根据电机驱动器控制的电流信号,电机转子会按照一定的顺序和速度进行旋转。
5. 重复上述步骤:电机会不断地重复执行上述步骤,以保持转子的稳定转动。
四、三相无刷直流电机驱动器件的选择选择适合的驱动器件对于三相无刷直流电机的正常运行至关重要。
常用的驱动器件包括功率MOSFET、IGBT和功率集成电路等。
1. 功率MOSFET:功率MOSFET具有开关速度快、损耗小等特点,适合用于中低功率的电机驱动。
2. IGBT:IGBT具有较高的工作电压和工作温度范围,适合用于高功率电机驱动。
3. 功率集成电路:功率集成电路集成了多种功能和保护电路,能够提供更全面的电机驱动控制。
五、三相无刷直流电机的控制方法三相无刷直流电机的控制方法主要有霍尔传感器反馈控制和电动势反馈控制。
1. 霍尔传感器反馈控制:通过采集霍尔传感器检测的转子位置信息,实时调整电机驱动器的输出电流,以控制电机转速和转向。
2线直流无刷电机控制原理一、2线直流无刷电机的工作原理2线直流无刷电机是一种电子式换向的电机,其工作原理与传统的有刷直流电机有所不同。
有刷直流电机通过刷子与转子之间的接触,将电流传递到转子上,从而实现换向。
而无刷电机则通过电子控制器对电机的相序进行控制,实现换向操作,无刷电机因此具有更高的效率和可靠性。
2线直流无刷电机由转子和定子两部分组成。
转子内置有一组永磁体,而定子上则有若干个线圈。
当电流通过定子线圈时,会在定子上产生一个旋转磁场,这个旋转磁场与转子上的永磁体相互作用,从而使转子旋转。
二、2线直流无刷电机的控制方法1. 基本控制方法2线直流无刷电机的基本控制方法是通过改变电机的相序来实现转子的换向。
电机的相序指的是磁场的旋转方向,通过改变磁场的旋转方向,可以使电机实现正转、反转或停止。
2. 传感器控制方法传感器控制方法是通过安装霍尔传感器等位置传感器来检测转子的位置,从而实现精确的换向控制。
传感器能够实时地监测转子的位置,通过电子控制器对电机的相序进行控制,可以实现更精确的控制效果。
3. 无传感器控制方法无传感器控制方法是通过电机自身的反电势来判断转子的位置,从而实现换向控制。
无传感器控制方法相对于传感器控制方法来说更加简单和经济,但精度较低。
三、2线直流无刷电机的优势和应用领域1. 高效节能:由于无刷电机没有摩擦损耗和电刷导致的能量损耗,具有更高的效率和节能的特点。
2. 高可靠性:无刷电机没有电刷和电刷磨损等零件,因此具有更长的使用寿命和更高的可靠性。
3. 低噪音:由于无刷电机没有电刷的摩擦噪音,因此噪音较低。
4. 广泛应用:2线直流无刷电机广泛应用于家电、办公设备、汽车、航空航天等领域,如电动工具、电动汽车、机器人等。
总结:2线直流无刷电机通过电子控制器对电机的相序进行控制,实现转子的换向。
它具有高效节能、高可靠性和低噪音的优势,并广泛应用于各个领域。
通过不同的控制方法,可以实现对2线直流无刷电机的精确控制,满足不同应用的需求。
主要内容一、几个术语解释(极对数、相数、电角度、电角频率、相电压、线电压、反电动势)二、无刷直流电机的运行原理(运行原理、数学模型)三、无刷直流电机的基本控制方法(各参数相互关系、换流过程与换流模式)四、车用无刷直流电机及其控制系统(基本控制、弱磁控制)•极对数():电机转子中N-S 极的对数,2,3,4,……•相数():电机绕组个数,3,6,12,……•电角度()/机械角度():•电角频率()/机械角频率():•电角频率与电机转速():•极(2p )槽(Z )配合:Z/2p•相电压:电机相绕组对电机中性点电压•线电压:电机两相绕组之间电压•反电动势:电机到拖时某一转速下对应电机线电压峰值e θΩe ωθp 2m n θθ⋅=p e Ω⋅=p eωp n e ω60=⎰=dt e e ωθ∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙dU 1T 5T 3T 4T 6T 2T 1D 3D 5D 4D 6D 2D oa i bi c i ae be ce d C A BC无刷直流电机的组成♦无刷直流电机组成部分:电机本体、位置传感器、电子开关线路;♦电机本体在结构上与永磁同步电动机相似;♦电子开关线路由功率逻辑开关单元和位置传感器信号处理单元两部分组成;♦电子开关线路导通次序是与转子转角同步的,起机械换向器的换向作用。
+-ABCA ’B ’C ’1V 2V 3V 位置传感器无刷直流电机电子开关线路120度导通时转子位置与电流换相关系a) 0度(换相前)b) 0度(换相后)c) 60度(换相前)d) 60度(换相后)e) 120度(换相前)f) 120度(换相后)A'A B'BC'CC'B'A A B'CC'BA 'A B'C'A CB 'B'C A 'A C 'BB'C A 'A C'BA 'C Ba)b)c)d)e)f)rωrωrωrωrωrωsθsθo60o 60o 120o120HALL 状态与PWM 、三相反电势和三相相电流的对应关系a PWM bPWM cPWM aHall b Hall cHall tωt ωtω61T T 23T T 43T T 45T T 65T T 21T T 61T T a i b i ci tωt ωtω61T T 23T T 43T T 45T T 65T T 21T T 61T T a e be ce tωt ωtω101100110010011001101120无刷直流电机的电流和感应电动势具有以下特点:(1)感应电动势为三相对称的梯形波,其波顶宽为(2)电流为三相对称的方波;(3)梯形波反电势与方波电流在相位上严格同步。
无刷直流电机工作原理无刷直流电机,也称为永磁同步电机,是一种使用永磁体作为励磁源,通过电子器件将电流进行控制的直流电机。
相比传统的刷式直流电机,无刷直流电机具有效率高、寿命长、无电刷磨损等优点,因此在许多领域被广泛应用。
一、无刷直流电机的基本原理无刷直流电机的基本原理是电磁互作用,通过电流在永磁体和绕组之间产生的磁场相互作用,在转子上产生驱动转动的力。
在无刷直流电机中,永磁体通常置于定子上,通过外加直流电源进行励磁。
转子上的绕组被称为“驱动绕组”,通过在驱动绕组中施加不同的电流,可产生不同的磁场。
二、无刷直流电机的基本结构无刷直流电机主要由转子、定子、传感器、控制器等组成。
1. 转子:转子是无刷直流电机的旋转部分,通常由永磁体和绕组组成。
永磁体的磁场与定子绕组的磁场相互作用,产生旋转力。
2. 定子:定子是无刷直流电机的静止部分,通常包括固定的绕组和铁芯。
定子绕组通过外加的电流产生磁场,与转子的磁场相互作用,驱动转动。
3. 传感器:传感器用于检测转子位置和速度等信息,并将其反馈给控制器。
常见的传感器包括霍尔传感器、光电传感器等。
4. 控制器:控制器是无刷直流电机的核心部件,用于根据传感器反馈的信息,控制驱动绕组的电流,从而实现转子的精准控制。
三、无刷直流电机的工作过程无刷直流电机的工作过程可以分为电气转子和机械转子两个阶段。
1. 电气转子阶段:在电气转子阶段,控制器根据传感器反馈的转子位置信息,确定要施加给驱动绕组的电流。
根据电流的方向和大小,驱动绕组上的磁场与定子磁场相互作用,产生转矩。
在电气转子阶段,控制器会周期性地改变驱动绕组上的电流方向和大小,以确保转矩的连续性和平稳性。
通过精密的控制,无刷直流电机可以实现精准的速度和位置控制。
2. 机械转子阶段:在电气转子阶段完成后,转子进入机械转子阶段。
在机械转子阶段,转子受到的驱动力逐渐减小,最终达到平衡状态。
此时,无刷直流电机转子的运动速度和位置由外界负载和机械特性决定。
无刷电机工作及控制原理(图解)左手定则,这个是电机转动受力分析的基础,简单说就是磁场中的载流导体,会受到力的作用。
让磁感线穿过手掌正面,手指方向为电流方向,大拇指方向为产生磁力的方向,我相信喜欢玩模型的人都还有一定物理基础的哈哈。
让磁感线穿过掌心,大拇指方向为运动方向,手指方向为产生的电动势方向。
为什么要讲感生电动势呢?不知道大家有没有类似的经历,把电机的三相线合在一起,用手去转动电机会发现阻力非常大,这就是因为在转动电机过程中产生了感生电动势,从而产生电流,磁场中电流流过导体又会产生和转动方向相反的力,大家就会感觉转动有很大的阻力。
不信可以试试。
三相线分开,电机可以轻松转动三相线合并,电机转动阻力非常大右手螺旋定则,用右手握住通电螺线管,使四指弯曲与电流方向一致,那么大拇指所指的那一端就是通电螺旋管的N极。
状态1当两头的线圈通上电流时,根据右手螺旋定则,会产生方向指向右的外加磁感应强度B(如粗箭头方向所示),而中间的转子会尽量使自己内部的磁感线方向与外磁感线方向保持一致,以形成一个最短闭合磁力线回路,这样内转子就会按顺时针方向旋转了。
当转子磁场方向与外部磁场方向垂直时,转子所受的转动力矩最大。
注意这里说的是“力矩”最大,而不是“力”最大。
诚然,在转子磁场与外部磁场方向一致时,转子所受磁力最大,但此时转子呈水平状态,力臂为0,当然也就不会转动了。
补充一句,力矩是力与力臂的乘积。
其中一个为零,乘积就为零了。
当转子转到水平位置时,虽然不再受到转动力矩的作用,但由于惯性原因,还会继续顺时针转动,这时若改变两头螺线管的电流方向,如下图所示,转子就会继续顺时针向前转动,状态2如此不断改变两头螺线管的电流方向,内转子就会不停转起来了。
改变电流方向的这一动作,就叫做换相。
补充一句:何时换相只与转子的位置有关,而与其他任何量无直接关系。
第二部分:三相二极内转子电机一般来说,定子的三相绕组有星形联结方式和三角联结方式,而“三相星形联结的二二导通方式”最为常用,这里就用该模型来做个简单分析。