新型全自动抓斗卸船系统
- 格式:pdf
- 大小:292.91 KB
- 文档页数:6
智能化抓斗卸船机若干关键技术分析我国的海运码头如今正在不断地增加,而海运码头每天所运输的货物量更是与日剧增。
货物量的增加使得更多的海运从事者将目光聚焦在了海运货物卸船方式上面,如何采用更加适应潮流的货物卸船方式从而提高卸船效率和搬运质量就成为了一个普遍被关注的话题。
标签:智能化;抓斗卸船机;关键技术我国的海上丝绸之路计划使得我国的海运得到了极大的发展,而海运本身也是需要很多技术支持的,除了在海上运输的过程中需要极高的航海技术,在船只到达码头后对船上货物进行卸货也同样需要技术支持。
在货物卸船中难度最大的货物卸船应当是散货卸船,散货卸船所指的是在海运中运载煤炭、化肥、蔗糖、谷物、矿石等运载船只的卸船工作,散货运载船目前的运载量是仅次于集装箱运载量的第二大海运运载船。
而对于散货运载船的卸货而言其远比集装箱卸货要困难的多,于是针对这样的情况桥式智能化抓斗卸船机就应运而生了,利用这种卸船机进行散货卸船工作可以在最大程度上提高卸船的效率并且保证卸船的质量。
1 桥式智能化抓斗卸船机的控制方式桥式智能化抓斗卸船机有着不同的运行方式,通过对人工依赖程度的不同,我们将之分为手动、半自动、全自动三种。
在当今智能化控制技术快速发展的情况下桥式抓斗卸船机也同样走上了智能化的道路。
桥式抓斗卸船机的智能化方面主要是表现在其防摆自动控制系统方面,这种自动控制系统在国内的应用已经非常广泛但是这种技术只是一种缓解司机工作中连续作业过于疲劳的一种途径,其并不能真正实现桥式抓都卸船机的真正自动化工作,充其量也仅仅是一种半自动化的系统。
在桥式抓斗卸船机的工作过程中其主要操作者和决策者依然还是桥式抓斗机的司机而非智能化程序,并且在对料点进行抓取时还是需要人工的帮助因此这种智能化抓斗卸船机如果真正想脱离人工还需要走一段很长的路,尤其是在人工智能对智能化抓斗卸船机的控制方面和对于货物堆料点的检测及图像分析方面都还需要有更大的进步。
下面就来介绍一下目前的几种桥式抓都卸船机的控制方式。
2024年抓斗式卸船机市场发展现状1. 引言抓斗式卸船机是一种用于卸载散装物料的机械设备,广泛应用于港口、码头等场所。
本文将探讨抓斗式卸船机市场的发展现状,并分析其未来的发展趋势。
2. 市场规模随着全球贸易的增加,港口和码头的卸货需求不断提升,推动了抓斗式卸船机市场的快速发展。
目前,全球抓斗式卸船机市场规模已达到数十亿美元。
亚太地区是全球抓斗式卸船机市场的主要消费地区,占据了市场份额的相当大部分。
3. 市场驱动因素抓斗式卸船机市场的发展受到以下几个主要因素的驱动:3.1. 全球贸易增长全球化进程不断加速,国际贸易额不断扩大,促使了港口货物流量的增加,因此对卸货设备的需求也相应增长。
3.2. 港口现代化建设越来越多的港口开始进行现代化建设,提高装卸效率和容量,而抓斗式卸船机作为高效的装卸设备,成为港口现代化建设的重要组成部分。
3.3. 技术进步随着科技的不断进步,抓斗式卸船机的性能和自动化程度不断提高,更加适应复杂的卸货环境和需求,进一步推动了市场的发展。
4. 市场竞争格局目前,抓斗式卸船机市场存在一些主要的竞争厂商,其中包括XXXX、XXXX等。
这些厂商通过不断创新和提高产品质量来争夺市场份额,并与其他竞争对手展开激烈的价格战。
5. 市场挑战与机遇抓斗式卸船机市场面临着一些挑战和机遇。
5.1. 环保压力随着环境保护意识的提高,对于卸货过程产生的污染和废弃物处理要求也越来越高,抓斗式卸船机需要采取相应的措施来减少对环境的影响。
5.2. 技术创新抓斗式卸船机市场需要不断进行技术创新,提高产品的性能和效率,以适应不断变化的市场需求。
5.3. 新兴市场的机遇发展中国家和地区的港口建设进程仍在进行中,这为抓斗式卸船机市场提供了巨大的机遇。
6. 市场前景随着全球经济的持续发展和国际贸易的增加,抓斗式卸船机市场有望继续保持稳定快速增长。
同时,技术创新和环保要求的推动将给市场带来更多的机遇和挑战。
预计在未来几年,市场规模将进一步扩大,并且竞争格局也将更趋激烈。
桥式抓斗卸船机的自动化技术研发与应用桥式抓斗卸船机是一种广泛应用于港口、码头等物流枢纽的重要设备,主要用于将散装货物从船只卸下并输送至储料场或装车装置。
随着自动化技术的不断发展,桥式抓斗卸船机的自动化技术研发与应用也逐渐成为趋势。
以下是对桥式抓斗卸船机自动化技术研发与应用的详细介绍:1. 自动化控制系统:桥式抓斗卸船机的自动化控制系统是实现卸船过程自动化的关键。
该系统主要包括控制柜、PLC(可编程逻辑控制器)、传感器、操作台等组成部分。
其中,控制柜主要负责接收操作台指令,并控制抓斗的升降、开合、旋转等动作;PLC则负责监控整个卸船过程的运行状态,并通过传感器获取相关数据,如抓斗内物料的重量、抓斗的位置、设备的运行状态等,从而实现自动化控制。
2. 智能识别与调度系统:智能识别与调度系统是桥式抓斗卸船机自动化的重要组成部分,主要用于识别和调度船只、货物和设备。
该系统主要包括图像识别、目标跟踪、路径规划、任务调度等模块。
通过摄像头等传感器获取船只、货物和设备的图像信息,并通过图像识别技术对货物进行分类和定位。
同时,通过目标跟踪技术对船只、货物和设备进行实时监控,实现动态调度。
此外,路径规划和任务调度模块还能根据现场环境和运行状态,自动规划设备运行路径和调度任务,提高卸船效率。
3. 自动纠偏与防摇系统:桥式抓斗卸船机在卸船过程中容易受到风浪、船只晃动等因素的影响,导致设备发生偏移或摇摆。
为了解决这一问题,自动纠偏与防摇系统被广泛应用于桥式抓斗卸船机的自动化技术中。
该系统主要包括传感器、控制器、执行器等组成部分。
通过传感器获取设备的位置、姿态等信息,并通过控制器计算出设备实际位置与设定位置之间的偏差,进而控制执行器进行纠偏和防摇操作。
此外,自动纠偏与防摇系统还能根据现场环境和运行状态,自动调整设备的工作模式,提高卸船稳定性和安全性。
4. 智能故障诊断与维护系统:智能故障诊断与维护系统是桥式抓斗卸船机自动化的重要保障措施,主要用于检测和诊断设备故障,并实现自动维护。
抓斗卸船机无人驾驶系统改造探讨摘要:本文在了解发电厂卸煤码头情况的基础上,分析了无人驾驶改造项目的调研结果,探讨了抓斗卸船机无人驾驶改造的问题,并提出了工作的可行思路,改造卸船机实现操作自动化能节约人力、提高设备安全和卸船效率,减少依赖熟练司机的可能,为改造工作开展提供了参考依据。
关键词:抓斗卸船机;无人驾驶;卸煤码头;改造0引言在发电厂卸煤码头的港池内一般都配备若干台桥式抓斗卸船机,工作方式大多采用手动操作,自动化程度不高。
来煤方式多为码头自航船,卸船机司机通过手动将煤炭抓取送至卸料斗,利用皮带将煤输送至煤炭堆场,待舱底有少量余煤时,由人工将推耙机吊运至船舱,由人工操作推耙机和抓斗协作执行清舱任务。
1存在问题及改造原因1.1 存在问题。
在发电厂抓斗卸船机是卸煤码头的主要装备,以司机操作模式为主,司机的熟练程度决定着卸船作业的安全与效率。
司机操作中,要在位于船舱上方的司机室内俯瞰煤堆和船舱,由于视野受限,观察效果类似于二维平面,不易看清煤堆的起伏高低情况。
控制抓斗抓料时司机要低头弯腰,争取抓满斗煤、防止煤堆塌陷埋没抓斗,以免船舱被碰到。
工作强度很大,长时间卸船对司机耐力、体力和专注力是个挑战。
一般连续几小时工作后,工作效率出现显著下降,24 h三班倒的作业模式和连续的流程作业,导致司机的流动性很大,容易给电厂带来安全生产的隐患。
同时,为了卸煤速度快司机常利用甩斗动作,导致粉尘在煤斗上方飞扬剧烈,对环保产生一定的压力,也造成了设备磨损和影响钢丝绳寿命。
1.2 改造原因。
随着人工智能技术的发展,在恶劣工作环境或人工劳动重复的场合用机器取代人工是大势所趋。
与其他起重设备比较,抓斗卸船机的电控系统配置较高,电控基础较好。
对卸船机电控技术改造,采用扫描技术对物料和船舱三维重现,制定结合人工智能技术的抓斗规划和卸船规则,使卸船机实现无人驾驶是一个好思路。
抓斗卸船机应用无人驾驶系统,能根本解决依赖熟练司机的问题、排除运行设备的安全风险、提高接卸船煤的效率,将司机从重复的高强度劳动中摆脱出来,同时着力推广人工智能在燃煤电厂的应用,不断提升技术水平,达到降本增效的目的。
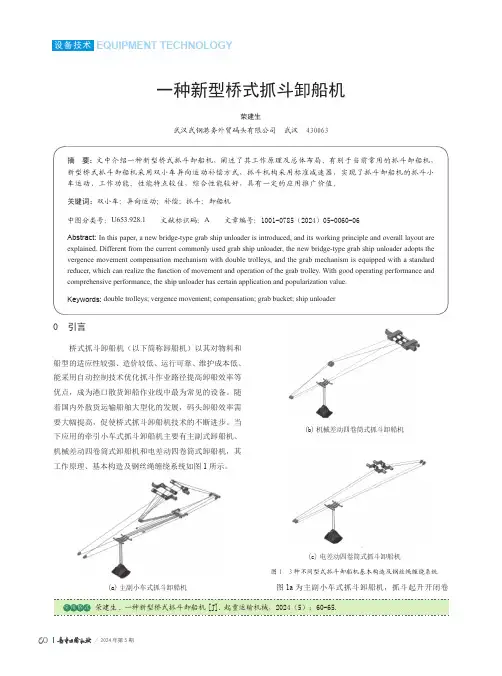
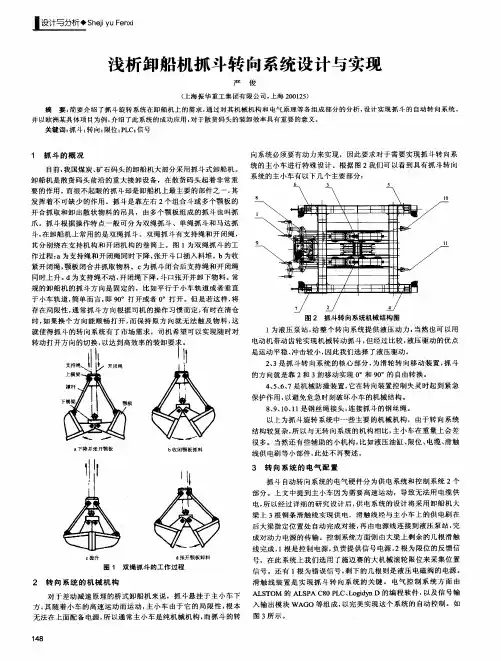
一种新型桥式抓斗卸船机荣建生武汉武钢港务外贸码头有限公司 武汉 430063摘 要:文中介绍一种新型桥式抓斗卸船机,阐述了其工作原理及总体布局。
有别于当前常用的抓斗卸船机,新型桥式抓斗卸船机采用双小车异向运动补偿方式,抓斗机构采用标准减速器,实现了抓斗卸船机的抓斗小车运动、工作功能。
性能特点较佳,综合性能较好,具有一定的应用推广价值。
关键词:双小车;异向运动;补偿;抓斗;卸船机中图分类号:U653.928.1 文献标识码:A 文章编号:1001-0785(2024)05-0060-06Abstract: In this paper, a new bridge-type grab ship unloader is introduced, and its working principle and overall layout are explained. Different from the current commonly used grab ship unloader, the new bridge-type grab ship unloader adopts the vergence movement compensation mechanism with double trolleys, and the grab mechanism is equipped with a standard reducer, which can realize the function of movement and operation of the grab trolley. With good operating performance and comprehensive performance, the ship unloader has certain application and popularization value.Keywords: double trolleys; vergence movement; compensation; grab bucket; ship unloader0 引言桥式抓斗卸船机(以下简称卸船机)以其对物料和船型的适应性较强、造价较低、运行可靠、维护成本低、能采用自动控制技术优化抓斗作业路径提高卸船效率等优点,成为港口散货卸船作业线中最为常见的设备。
基于ABB变频器acs800的抓斗式卸船机传动系统的设计1 引言随着工业生产对起重机调速性能要求的不断提高,传统的起重机调速方法如:绕线转子异步电动机转子串电阻调速、晶闸管定子调压调速和串级调速等,它们共同的缺点是绕线转子异步电动机有集电环和电刷,要求定期维护,再加上大量继电器、接触器的使用,致使现场维护量较大,调速系统的故障率较高,并且调速系统的综合技术指标较差。
交流变频调速技术在工业界的广泛应用,为交流异步电动机驱动的起重机大范围、高质量地调速提供了全新的方案。
abb全新概念产品acs800系列变频器用于控制1.1~2800kw的交流电机,它具有高性能的调速指标,可以使用结构简单、工作可靠、维护方便的鼠笼式异步电动机,并且高效、节能,维护工作量小,保护监测功能完善,运行可靠性较传统的交流调速系统有较大的改善。
其另外一大优点就是全功率范围内统一使用了相同的控制技术,例如启动向导,自定义编程,dtc控制,通用备件,通用的接口技术,以及用于选型、调试和维护的通用软件工具。
此项改进使得全系列配件达到了最大限度的统一,给用户带来了巨大的经济效益。
2 抓斗式卸船机示意图、工作过程及对转动系统的要求抓斗式卸船机是大型港口、电厂、冶金、化工等行业码头散状货物装、卸船重要装备之一,适用于包括煤、矿石、水泥、化工原料、粮食等散状货物的装卸。
抓斗式卸船机外观示意图如图1所示。
图1抓斗式卸船机其主要的工作过程为从船上将散货抓起后运送至岸边的传送带上。
在其运动过程中主要包括起升、开合、俯仰、大车、小车等传动点,它们分别由单独的控制单元及逆变单元驱动,对变频器控制精度要求较高。
acs800变频器核心技术就是直接转矩控制(dtc),是目前工业应用中先进的交流异步电机控制方式。
dtc的杰出的性能及abb针对各种工业应用的专用控制宏,使得acs800变频器适用于各种领域并有着杰出的表现。
图2为dtc与pwm调速响应波形比较示意图。
抓斗卸船机工作原理
抓斗卸船机是一种用于装卸散装货物(如煤炭、矿石、谷物等)的重型机械设备。
其工作原理主要涉及到抓斗、输送带和旋转机构
等部件的协调配合。
首先,抓斗卸船机的工作原理涉及到抓斗的作用。
抓斗是用于
在货船上抓取货物的装置,通常由多个抓斗组成,可以通过旋转机
构在水平和垂直方向移动。
当抓斗被放置在货物堆上时,它会闭合
并抓取一定量的货物。
其次,抓斗卸船机的工作原理还涉及到输送带的作用。
抓斗抓
取货物后,通过输送带将货物运输到目的地。
输送带通常位于抓斗
的下方,可以沿着卸船机的各个部分移动,将货物输送到堆放区或
者运输设备上。
另外,抓斗卸船机的工作原理还包括旋转机构的作用。
旋转机
构使抓斗卸船机能够在水平和垂直方向上进行旋转和移动,以便于
准确地抓取货物并将其输送到指定位置。
总的来说,抓斗卸船机的工作原理是通过抓斗抓取货物,输送
带将货物输送到目的地,并借助旋转机构实现机器在水平和垂直方向上的移动和旋转,从而实现高效装卸货物的功能。
这些部件的协调配合使得抓斗卸船机能够快速、准确地完成货物装卸任务,提高了装卸效率,降低了人力成本,是现代港口装卸作业中不可或缺的重要设备。
抓斗式挖泥船工作原理
抓斗式挖泥船是一种常见的水上工程机械,通常用于在河流、
港口和海洋等水域进行挖泥、清淤和疏浚作业。
其工作原理如下:
1. 抓斗结构,抓斗式挖泥船主要由船体、抓斗、卸泥装置和动
力系统等组成。
抓斗通常由两个或多个可开合的铲斗组成,可以通
过液压系统控制开合动作。
2. 挖泥作业,当抓斗式挖泥船到达工作地点,液压系统驱动抓
斗打开,铲斗沉入水底或泥沙中,然后通过液压系统控制抓斗闭合,将泥沙挖取并吊起。
3. 卸泥作业,当抓斗充满泥沙后,液压系统将抓斗提升至船体
上方,然后打开抓斗,释放泥沙到卸泥装置中。
卸泥装置可以是泵
或输送带等设备,将泥沙卸载到岸上或指定地点。
4. 动力系统,抓斗式挖泥船通常配备柴油机或电动机作为动力源,驱动液压系统和船体的移动,保证挖泥和卸泥作业的顺利进行。
总的来说,抓斗式挖泥船通过抓取、提升和卸载泥沙的循环作
业,实现了在水域进行挖泥、清淤和疏浚作业的功能。
这种工作原理使其成为水利工程和港口建设中不可或缺的重要设备。
—266—设备管理1 前言码头生产的过程中需要使用到多种机械设备,而机械设备的运行质量是生产高效性的重要基础和前提。
当前对桥式抓斗卸船机的需求在不断增加,为此有关人员应当不断优化桥式抓斗卸船机的整体性能,从而有效提升桥式抓斗卸船机的运行效率。
2 卸船机的操作流程港口装卸设备是由系统自动控制的。
对比相对先进的技术,它可以控制卸船机抓斗的起升开闭,并不断优化抓斗运行路径。
它可以为卸船机操作人员提供五种操作模式:卸船就地操作模式,正常状态(司机室手动)操作模式,半自动操作模式,全自动操作模式以及完整的码头系统自动化智能模式。
操作人员在完成了各种模式的相关设定后,可以通过自动控制系统实现卸船机的操作;全自动模式下的船型设置以及舱口数据、物料信息、抓取返回点的更新均由自动控制系统完成。
在自动智能系统中,智能系统分为手动和自动两种,增加了船舱的物料扫描。
该系统可以自动完成船型设置等物料建模,大大缩短了自动智能卸料的准备时间,也可对船舱内物料进行最优抓取点的选择,实现系统自动卸料。
3 自动化控制在卸船机上的应用3.1港口散货卸船系统大部分散货装卸系统采用桥式抓斗装卸机。
全自动卸船机通常使用激光扫描仪等设备来识别船舶的位置,舱口的总高度和船底的宽度,通过实时扫描建模来实现自动监视和识别。
大港口散货卸货系统的工作流程:首先,通过船型扫描系统来实现系统识别舱口边缘及物料形状,计算中间位置并确定舱门的大小,然后将数据发送回码头中控系统,比较船型的综合数据与中控系统中的船舶卸料任务,以确定物料卸载工单及流程。
其次,使用卸船机臂架头部的激光扫描系统扫描并对货堆形状进行建模。
将数据综合分析并通过光纤或无线网络送回中央控制室之后,中控系统根据物料需要卸载的地点配置卸料工单。
第三,中控系统可以根据船型舱口和船舱内物料堆的形状来设置卸料流程,可以通过发送命令给卸船机进而改变卸船机的卸料流程、大车换舱、抓取频率等,使抓斗式卸船机实现自动卸船。
ABB变频器在抓斗式卸船机控制系统中的应用随着现代物流业的发展,大型装卸设备如卸船机在港口起着至关重要的作用。
而在卸船机的控制系统中,ABB变频器的应用正逐渐成为一个重要的趋势。
ABB变频器作为一种高性能的电力调节装置,具有灵活性、稳定性和高效性的特点,因此在卸船机的控制系统中发挥着重要的作用。
首先,ABB变频器通过对电机的控制,能够实现卸船机的运行速度的调节。
在装卸过程中,卸船机的运行速度需要根据实际情况进行灵活调整,以适应不同的工作环境。
而ABB变频器可以根据需要调整电机的转速,从而实现卸船机的运行速度的变化。
这样一来,卸船机可以根据需求灵活地进行装卸作业,提高工作效率。
其次,ABB变频器还能够实现卸船机的起停控制。
卸船机在工作过程中,需要频繁地进行起停操作。
而传统的控制方式通常需要通过机械开关进行操作,不仅操作繁琐,而且容易出现故障。
而采用ABB变频器进行起停控制,则可以实现电机的软启动和软停止,有效地降低了启动和停止过程中的冲击力,延长了设备的使用寿命。
另外,ABB变频器还能够实现卸船机的负载控制。
卸船机在工作过程中,往往需要承担不同程度的负载,这就对控制系统的负载控制能力提出了更高的要求。
而ABB变频器具有良好的负载适应性,可以根据负载情况自动调节输出功率,保证卸船机在不同负载下的稳定运行。
最后,ABB变频器还能够实现卸船机的故障诊断和保护功能。
通过对电机的监测和故障检测,ABB变频器可以及时发现电机运行中的异常情况,并采取相应的保护措施。
这有效地降低了设备的故障率,提高了设备的可靠性和稳定性。
综上所述,ABB变频器在抓斗式卸船机控制系统中的应用具有重要意义。
它通过对电机的控制、起停控制、负载控制以及故障诊断和保护,实现了卸船机的灵活性、稳定性和高效性。
相信随着技术的不断进步和应用的不断推广,ABB变频器在卸船机控制系统中的地位将会越来越重要。