卸船机 工作原理讲课
- 格式:ppt
- 大小:11.21 MB
- 文档页数:56
第一章:起重机械的主要参数1.概论1.1起重机械:搬运机械,短距离1.2性质:重复循环(取物、起升、平移、下降、卸载、返回原处)1.3基本特点:起动、制动、正反运动1.4组成:运动机构、承载机构、动力源、控制设备、安全装置、信号指示装置等2.主要参数2.1额定起重量(Gn):是指起重机能允许吊起的重物或物料连同可分吊具或属具(如抓斗、电磁吸盘、平衡梁等)质量的总和表示法:1.如“15/3t”:表示主钩可吊15t,副钩可吊3t2.如20t门机“20/16/13/10—9-20/23/27/30”:表示9-20m可吊20t;9-23m可吊16t;9-27m可吊13t;9-30m可吊10t。
2.2跨度(S):运行轨道之间的水平距离(一般每3m为一级)2.3轨距(K):轨道中心线或起重行走轮踏面中心线之间的距离2.4基距(B):也称轴距沿纵向运动方向的起重机械小车支承中心线之间的距离2.5幅度(L):起重机置于水平场地时,空载吊具垂直中心线至回转中心线之间水平距离2.6起升高度(H):起重机水平停机面或运行轨道顶面至吊具允许最高位置的垂直距离2.7下降升度(h):吊具最低工作位置与起重机水平支承面之间的距离2.8机构工作速度:1.起升速度Vn(m/min) 2.大车运行速度VR(m/min)3.小车运行速度Vt(m/min)4.变幅速度VL(m/min)5.回转速度n(回转角度r/min)第二章:起重机械主要零部件及安全装置1.抓斗1.1用途:自动装卸散粒物料的取物装置(铁路货场、港口、散粒物料库、建筑工地等)1.2按其特点分为三种:单索抓斗、双索抓斗、电动抓斗1.3双索抓斗原理:主索承重,副索开闭斗1.4抓斗操作过程:降斗—闭斗—升斗—开斗1.5安检:1.抓斗闭合时,两水平刃和垂直刃口的错位差及斗口接触处的间隙不得大于3mm,最大间隙处的长度不大于200mm。
2.抓斗张开后,斗口不平行差不超过20mm。
(机械制造行业)电动装卸机械教材第章(卸车卸船)第2章卸船卸车学习目的:初级工:掌握卸车、船基本知识和安全操作知识;掌握门座桥式抓斗卸船机,浮式抓斗卸船机及门座式吊车设备的参数性能和结构原理;掌握转子翻车机及链斗卸车机设备的参数性能和结构原理;掌握设备维护保养内容及简单常见故障判断方法;掌握设备点检知识,设备安全保护设施原理及应用;危险源识别及防范。
中级工:掌握卸矿生产及质量要求;相关水运的基础知识;掌握相关卸车卸船设备单机各机构参数,组成及工作原理;掌握设备主要零部件的结构使用,维护要求及检查判断方法;掌握设备安全设施及保护装置的原理和故障判断处理方法;掌握设备点检要求及点检技术;掌握液压系统运行特点及操作维护技术。
高级工:掌握和应用卸车卸船设备的三大规程;掌握设备整机性能参数,结构特点和钢结构受力分布;准确判断一般设备故障及动手处理简单故障;能够对设备检修质量进行鉴定。
技师:掌握设备的电气原理、液压原理(液压系统知识);设备故障诊断分析知识;应用相关理论和技术提出设备改进性维修意见和建议;应用设备故障理论在设备维护和检修中提前预防故障发生的技术措施;准确检查设备钢结构裂纹生产位置及处理方法;准确判断设备钢结构变形的原因和处理意见。
第1节卸船1、水运基础知识。
(1)水路运输概述水路运输是指使用船舶进行运输的一种运输方式,也是交通运输体系中极其重要的组成部分。
我国拥有18000公里的海岸线和长江、珠江、淮河、黑龙江等丰富的内河水网,是世界上最早建造船舶和使用船舶的国家。
在当今经济全球化的进程中,在越来越广泛的国际贸易和国际运输中,水路运输,特别是海上运输的地位作用日益重要,成为世界经济发展极其重要的助推器,目前国际贸易运输量的80%是通过海运来完成的,海运的重要性可见一斑。
随着现代物流的兴起,运输已成为物流的一个重要环节,水路运输将在物流中发挥越来越重要的作用。
水路运输可分为内河运输和海上运输两大部分,内河运输是指船舶在陆地内的河流、湖泊等水道的运输,通常使用中小型船舶,海上运输是指船舶在海洋的运输,通常使用中大型船舶。
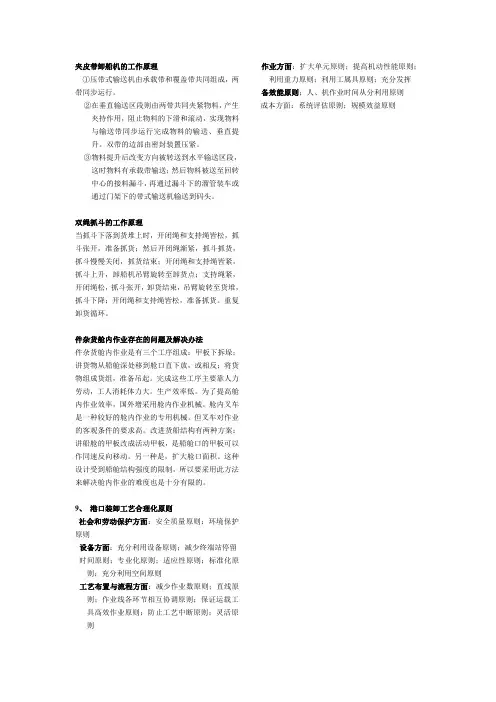
夹皮带卸船机的工作原理①压带式输送机由承载带和覆盖带共同组成,两带同步运行。
②在垂直输送区段则由两带共同夹紧物料,产生夹持作用,阻止物料的下滑和滚动,实现物料与输送带同步运行完成物料的输送、垂直提升。
双带的边部由密封装置压紧。
③物料提升后改变方向被转送到水平输送区段,这时物料有承载带输送;然后物料被送至回转中心的接料漏斗,再通过漏斗下的溜管装车或通过门架下的带式输送机输送到码头。
双绳抓斗的工作原理当抓斗下落到货堆上时,开闭绳和支持绳皆松,抓斗张开,准备抓货;然后开闭绳渐紧,抓斗抓货,抓斗慢慢关闭,抓货结束;开闭绳和支持绳皆紧,抓斗上升,卸船机吊臂旋转至卸货点;支持绳紧,开闭绳松,抓斗张开,卸货结束,吊臂旋转至货堆,抓斗下降;开闭绳和支持绳皆松,准备抓货。
重复卸货循环。
件杂货舱内作业存在的问题及解决办法件杂货舱内作业是有三个工序组成:甲板下拆垛;讲货物从船舱深处移到舱口直下放,或相反;将货物组成货组,准备吊起。
完成这些工序主要靠人力劳动,工人消耗体力大。
生产效率低。
为了提高舱内作业效率,国外增采用舱内作业机械。
舱内叉车是一种较好的舱内作业的专用机械。
但叉车对作业的客观条件的要求高。
改进货船结构有两种方案:讲船舱的甲板改成活动甲板,是船舱口的甲板可以作同速反向移动。
另一种是,扩大舱口面积。
这种设计受到船舱结构强度的限制,所以要采用此方法来解决舱内作业的难度也是十分有限的。
9、港口装卸工艺合理化原则社会和劳动保护方面:安全质量原则;环境保护原则设备方面:充分利用设备原则;减少终端站停留时间原则;专业化原则;适应性原则;标准化原则;充分利用空间原则工艺布置与流程方面:减少作业数原则;直线原则;作业线各环节相互协调原则;保证运载工具高效作业原则;防止工艺中断原则;灵活原则作业方面:扩大单元原则;提高机动性能原则;利用重力原则;利用工属具原则;充分发挥备效能原则;人、机作业时间从分利用原则成本方面:系统评估原则;规模效益原则。
技术讲课教案*******技术职称:高级卸储煤值班员所在岗位:码头主值讲课时间:2011年05月09日技术讲课教案培训题目:卸船机各就地操作站的操作培训课件内容摘要:一、操作站简介和原则:1 卸船机共分布有:大车、副司机室、司机室、俯仰室、机械房等五个操作站,在司机室操作站可以实现整机各主辅机构的操作,实现正常卸料操作,对整机进行集中控制。
司机室操作站设有左、右联动操作台,在左联动台可以实现大车、小车行走操作、同步校正与抓斗设定、各操作功能选择及悬臂俯仰机构的操作;右联动台实现起升、开闭机构的操作,自动操作模式的设定,物料处理和喷水除尘系统的控制,挡风门、接料板及司机室行走机构的操作;2 在正常情况下,在司机室操作各机构,就地操作主要在各机构检修和试机的情况下进行;排空料斗和收放悬臂也必须在就地操作站操作;3 司机室操作模式选择开关分为“特殊”、“正常”、“高位”、“自动”四个档位,特殊位置用于吊推扒机、校正同步及设定抓斗等操作,正常模式用于正常卸煤作业,自动模式在卸船机进行自动作业时使用,而高位模式是卸又高又空的船时使用。
操作模式的选择只适用于小车、起升、开闭机构的操作。
二、大车机构就地操作(1)大车操作时的注意事项1)司机操作前检查锚定装置、防风栓是否释放;2)检查大车行走区域无影响大车行走的障碍物;3)走大车时不要频繁启停4)大车过控制、动力电缆中点时应减速行驶,防止瞬间拉扯导致电缆过松、过紧5)在卸煤作业前应安装大车轨道限位挡块,作业中行走大车要注意接料板与煤轮船尾观看台之间距离,防止卸船机接料板与煤轮船尾观看台碰撞6)大车行走时尽量避免行走司机室和收放接料板(2)大车机构就地操作1)就地控制箱操作大车行走。
在未进行操作的初始状态,操作电源都应在零位;2)在行走大车前应现场检查锚定、防风栓处于解除状态,控制电缆、动力电缆无松弛;3)将控制箱开关打到“合闸”位置,此时合闸灯亮,检查试灯按钮正常后,确认故障都已复位;4)司机按下“夹轮器释放”按钮,将夹轮器打开,夹轮器释放按钮灯常亮,无闪烁;5)司机根据需要选择前后行走按钮,大车行走警报鸣5秒后,大车向前或向后行走;6)操作完成后,将控制电源选择开关打至“分闸”位置。
桥式抓斗卸船机的差动减速机工作原理阐述在我国的很多行业中,例如码头或者是电力公司中都依赖大型的机械设备进行生产作业,这一问题在码头作业中更为明显。
作为码头作业中的重要以及关键设备之一,桥式抓斗卸船机设备的使用效率和自身性能都能够在很大程度上影响码头工作的工作效率。
在桥式抓斗卸船机设备中,有很多的部件在实际的应用中起到非常大的作用,其中就包含了差动减速机这一重要部件。
作为核心部件之一,差动减速机的工作原理以及工作效率在很大程度上决定了桥式抓斗卸船机的使用效率和使用寿命。
文章主要针对桥式抓斗卸船机设备中的差动减速机的相关工作原理以及其他内容进行简要的阐述。
标签:桥式抓斗卸船机;差动减速机;传动;工作原理;自由度Abstract:In many industries of our country,such as wharves or power companies,they rely on large mechanical equipment for production operations. This problem is more obvious in the terminal operations. As one of the most important and key equipment in wharf operation,the efficiency and performance of bridge-type grab ship unloader can affect the efficiency of wharf work to a great extent. In the bridge grab ship unloader equipment,there are a lot of parts in the actual application that play a very large role,including the differential reducer this important part. As one of the core components,the working principle and efficiency of differential reducer determine the service efficiency and service life of bridge grab ship unloader to a great extent. The paper mainly aims at the relevant working principle of the differential reducer in the bridge grab ship unloader equipment as well as other contents to carry on the brief elaboration.Keywords:bridge grab ship unloader;differential reducer;transmission;working principle;degree of freedom在码头装卸的过程中,桥式抓斗装船机是一个非常重要的应用设备。
船用拖曳机械的设计原理与工作原理解析引言:船用拖曳机械是一种用于拖曳船只或其他物体的设备,广泛应用于航运、海洋工程、救援等领域。
本文将对船用拖曳机械的设计原理和工作原理进行详细解析,以帮助读者深入了解这一领域的知识。
一、设计原理:船用拖曳机械通常由以下几个关键部件组成:牵引装置、控制系统、动力系统和支撑结构。
1. 牵引装置:牵引装置是船用拖曳机械主要的工作部位,它通过牵引绳、链或钢缆等将机械与被拖曳物体连接起来。
牵引装置必须具备足够的强度和稳定性,以承受拖曳过程中的巨大引力和扭矩。
2. 控制系统:控制系统用于操作和控制船用拖曳机械的运行,它通常包括操作杆、控制阀和相关的传感器。
操作人员通过操作杆来控制牵引装置的运动,传感器则用于监测机械的运行状态。
3. 动力系统:船用拖曳机械的动力系统可以采用柴油机、电动机或液压系统等,以提供足够的动力来驱动牵引装置。
选择适当的动力系统需要考虑机械的工作负荷、船舶尺寸和使用环境等因素。
4. 支撑结构:支撑结构是船用拖曳机械的骨架,通常由钢材或其他高强度材料构成。
它负责支撑各个部件,并保证机械在拖曳过程中的稳定性和安全性。
二、工作原理:船用拖曳机械在工作过程中,通常包括以下几个阶段:连接、牵引、控制和解除连接。
1. 连接:在开始进行拖曳作业之前,操作人员需要将船用拖曳机械的牵引装置与被拖曳物体连接起来。
连接方式可以根据实际情况选择合适的方法,如使用弯曲弦索或钢缆。
2. 牵引:一旦连接完成,船用拖曳机械可以开始进行牵引操作。
操作人员通过控制系统操纵牵引装置的运动,以实现对被拖曳物体的牵引。
在牵引过程中,机械所施加的牵引力必须适当,以保证拖曳的平稳进行。
3. 控制:在拖曳过程中,操作人员需要通过控制系统对船用拖曳机械进行精确控制,以适应各种复杂的工作环境。
控制系统可以通过监测和调整牵引装置的运动,确保牵引力和运动轨迹的准确控制。
4. 解除连接:当完成拖曳作业后,需要将船用拖曳机械与被拖曳物体解除连接。
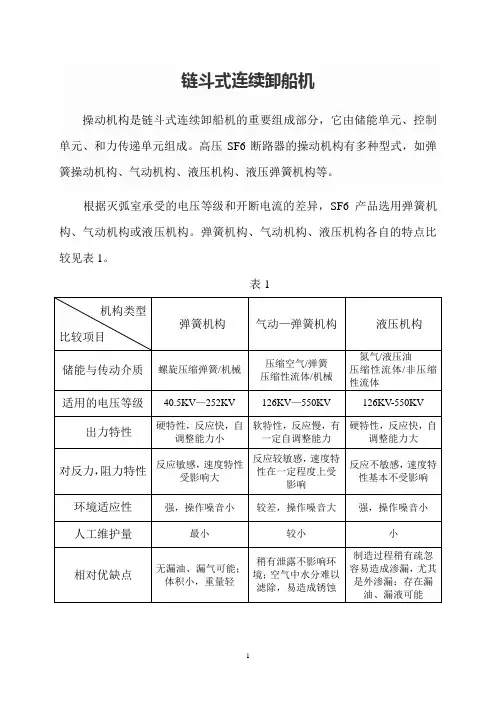
链斗式连续卸船机操动机构是链斗式连续卸船机的重要组成部分,它由储能单元、控制单元、和力传递单元组成。
高压SF6断路器的操动机构有多种型式,如弹簧操动机构、气动机构、液压机构、液压弹簧机构等。
根据灭弧室承受的电压等级和开断电流的差异,SF6产品选用弹簧机构、气动机构或液压机构。
弹簧机构、气动机构、液压机构各自的特点比较见表1。
表1一.弹簧操动机构弹簧操动机构是一种以弹簧作为储能元件的机械式操动机构。
弹簧的储能借助电动机通过减速装置来完成,并经过锁扣系统保持在储能状态。
开断时,锁扣借助磁力脱扣,弹簧释放能量,经过机械传递单元使触头运动。
弹簧操动机构结构简单,可靠性高,分合闸操作采用两个螺旋压缩弹簧实现。
储能电机给合闸弹簧储能,合闸时合闸弹簧的能量一部分用来合闸,另一部分用来给分闸弹簧储能。
合闸弹簧一释放,储能电机立刻给其储能,储能时间不超过15s(储能电机采用交直流两用电机)。
运行时分合闸弹簧均处于压缩状态,而分闸弹簧的释放有一独立的系统,与合闸弹簧没有关系。
这样设计的弹簧操动机构具有高度的可靠性和稳定性,既可满足O-0.3 sec -CO-180 sec -CO操作循环,又可满足CO-15sec-CO操作循环,机械稳定性试验达10000次。
1.1 CT20弹簧操动机构动作原理CT20型弹簧操动机构(图1、图2、图3)利用电动机给合闸弹簧储能,断路器在合闸弹簧的作用下合闸,同时使分闸弹簧储能。
储存在分闸弹簧的能量使断路器分闸。
1.1.1分闸动作过程图1所示状态为开关处于合闸位置,合闸弹簧已储能(同时分闸弹簧也已储能完毕)。
此时储能的分闸弹簧使主拐臂受到偏向分闸位置的力,但在分闸触发器和分闸保持掣子的作用下将其锁住,开关保持在合闸位置。
分闸操作(图1、2)分闸信号使分闸线圈带电并使分闸撞杆撞击分闸触发器,分闸触发器以顺时针方向旋转并释放分闸保持掣子,分闸保持掣子也以顺时针方向旋转释放主拐臂上的轴销A,分闸弹簧力使主拐臂逆时针旋转,断路器分闸。
桥式抓斗卸船机的差动减速机工作原理阐述摘要:四卷筒差动机构由电机、联轴器、制动器、差动减速器和钢丝绳卷筒等组成,起升、开闭、小车牵引可单独或联合动作,通过四卷筒机构既可以实现抓斗的升降和开闭,又可以实现抓斗小车的水平往返运行。
关键词:桥式抓斗卸船机;差动减速机;工作原理引言在发电厂输煤系统,桥式抓斗装船机是一个非常重要的设备。
在桥式抓斗装船机作业的时候,使用抓斗装置将船上的燃煤抓起,然后放料至卸船机料斗。
然后通过出料斗、落煤筒将燃煤运送到码头上安装的输煤皮带机上,通过输煤皮带机将燃煤运到煤场。
四卷筒机构主要有五个部分组成,首先是电动机,其次是联轴器,第三是制动器,再次是差动减速机,最后是钢丝绳专用卷筒。
这五个部件就形成了一个牵引机构,在牵引力的作用下,能够实现单独牵引或者是联合牵引。
1卸船机差动减速机结构1.1减速箱的自由度当输入轴的转数确定之后,输出轴的转数即已确定的减速箱,称为1个自由度的减速箱,其特征是箱体上只有2根轴。
箱体上有3根轴,当输入轴转数确定之后,输出轴的转数不确定,需待第三轴的转数定后才能称为有2个自由度的减速箱,一般称为差动减速箱。
差动减速机1个自由度固定,2个自由度按要求控制运动,并可进行运动或动力的合成或分解。
1.2差动减速箱的构成卸船机差动减速箱由齿轴、齿轮、太阳轮、行星轮、齿圈、惰轮、行星架、轴承、油封、箱体等组成。
其特点是结构合理,避免了电机承受额外径向力,便于润滑,热量容易散失,工作中不会出现齿面严重磨损、发热、甚至胶合的现象,齿轮传动效率高、润滑良好、使用寿命长,易装配、易拆卸,便于维修,从整体上提高了设备的运行质量。
2桥式抓斗卸船机故障预警研究2.1预警分析对于预警分析模块来说,在抓斗卸船机故障预警系统中,是最关键的一个模块。
其主要是根据监测数据与以往的故障数据库,采用科学有效的预测方法,来对卸船机即将要发生的一些故障进行预测分析,进而更好地做出合理的预判。
此外,再结合人力、物力以及经济实力,进而制定一套完整的解决方案,预警分析模块的高效运行,在很大程度上保障了整个预警系统的高效运行。