位移(行程)类监测仪组态说明
- 格式:doc
- 大小:227.50 KB
- 文档页数:12

A系列单显位移仪表使用说明书一、主要特点:1、适用于直接配位移传感器对相应物理量的测量控制2、开放式仪表参数设定3、支持多机网络通讯(需订货时说明),配专用软件,可方便地实现仪表与上位机的联网测控管理。
4、设定参数密码锁定,断电后永久保存。
二、技术参数输入信号模拟量0~5KΩ/ 0~5V / 4~20mA测量范围-1999~9999 字测量精度0.2%FS ± 1 字或0.5% FS ± 1 字分辨率1、0.1、0.001 字显示方式.-1999~9999 测量值显示.-1999~9999 设定值显示.发光二极管工作状态显示输出信号馈电输出DC24V,负载能力≤30mA控制方式可选择1~4 限控制或1~4 组带差式控制,LED 指示。
控制方式为继电器ON/OFF 带回差/带差(用户可自由设定)控制精度± 1 字报警方式可选择1~4 限报警,LED 指示。
报警方式为继电器ON/OFF 带回差(用户自由设定)报警精度± 1 字参数设定面板轻触式按键数字设定参数设定值断电后永久保存参数设定值密码锁定保护方式继电器输出状态LED 指示输入超/欠量程指示电源欠压自动复位工作异常自动复位(Watch Dog)联机通讯通讯协议为二线制、三线制或四线制,也可由用户特殊要求,波特率300~9600bps 可由仪表内部参数自由设定。
接口和主机采用光电隔离,提高系统的可靠性及数据的安全。
通讯距离可达1 公里,配上位机采集各种信号与数据,构成能源管理和控制系统。
配用软件,可实现多台仪表与一台或多台微机进行联机通讯,系统采用主——从通讯方式,能方便的构成各种能源管理和控制系统。
整个控制回路只需一根二(三、四)芯电缆,既查实现与上位机通讯,上位微机可呼叫用户设定的设备号,随时调用各台仪表的现场数据,并可进行仪表内部参数设定。
使用环境环境温度0 ~ 50℃相对湿度≤85%RH 避免强腐蚀气体供电电压AC220V+10-15%(50Hz±2Hz)线性电源供电功耗≤5W结构标准卡入式重量420g项目功能按压然后抬起按下不放保持5秒SET参数设定选择键1)在显示测量值时则进入一级参数设定,显示参数CLK符号。
VxSCADA监控组态软件使用手册浙江中控技术股份有限公司声 明⏹ 严禁转载本手册的部分或全部内容。
⏹ 在不经预告和联系的情况下,本手册的内容有可能发生变更,请谅解。
⏹ 本手册所记载的内容,不排除有误记或遗漏的可能性。
如对本手册内容有疑问,请与我公司联系。
文档标志符定义警告:标示有可能导致人身伤亡或设备损坏的信息。
WARNING : Indicates information that a potentially hazardous situation which, if not avoided, could result in serious injury or death.电击危险:标示有可能产生电击危险的信息。
Risk of electrical shock: Indicates information that Potential shock hazard where HAZARDOUS LIVE voltages greater than 30V RMS, 42.4V peak, or 60V DC may be accessible.防止静电:标示防止静电损坏设备的信息。
ESD HAZARD: Indicates information that Danger of an electro-static discharge to which equipment may be sensitive. Observe precautions for handling electrostatic sensitive devices注意:提醒需要特别注意的信息。
ATTENTION: Identifies information that requires special consideration.提示:标记对用户的建议或提示。
TIP :Identifies advice or hints for the user.目录1 概述 (1)1.1 技术指标 (1)2 监控组态软件的启动方法 (2)3 主界面 (3)3.1 菜单栏/工具栏 (3)4 操作小组组态 (5)4.1 添加操作小组 (5)4.2 一览画面组态 (6)4.3 趋势画面组态 (8)4.4 添加流程图 (10)4.5 添加报表 (13)4.6 调度组态 (15)4.6.1 调度组态主界面 (17)4.6.2 菜单/工具栏命令 (17)4.6.3 组态说明 (17)4.6.4 调度运行 (25)4.7 可报警分区设置 (25)4.8 报警声音设置 (28)4.9 实时报警打印设置 (32)4.10 位号关联流程图配置 (35)4.11 位号关联趋势画面配置 (38)4.12 操作指导配置 (41)4.13 报警订阅 (44)5 域组态 (46)5.1 报警颜色组态 (46)5.2 域变量组态 (49)5.3 监控用户授权 (49)5.4 历史趋势组态 (50)5.4.1 历史趋势组态主界面 (50)5.4.2 菜单功能 (51)5.4.3 组态说明 (51)5.4.4 位号筛选 (56)5.5 自定义报警分组 (57)6 资源文件 (62)7 组态发布 (66)8 其它功能 (67)8.1 组态树节点的复制剪切功能 (67)8.2 组态树节点的删除功能 (68)8.3 显示隐藏工具栏和状态栏 (68)9 资料版本说明 (69)监控组态软件1概述监控组态软件(VFHMICfg.exe)主要提供在组态模式下针对单个操作域中监控正常运行所需的相关内容进行有关组态的功能。
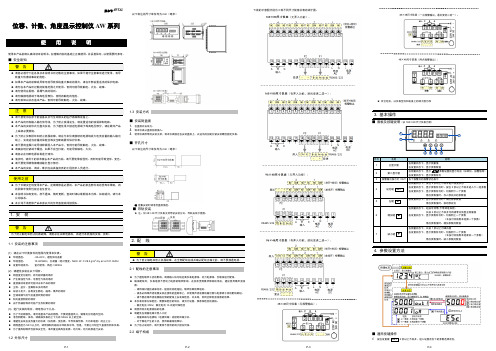
P-1P-2 P-3 P-4版本号AWXAI位移、计数、角度显示控制仪AW 系列使用本产品前请认真阅读本说明书,在理解内容的基础上正确使用。
并妥善保存,以便需要时参考。
■ 安全须知◆请务必遵守下述各条及本说明书所记载的注意事项,如果不遵守注意事项进行使用,有导致重大伤害或事故的危险。
◆ 如果本产品的故障或异常可能导致系统重大事故的场合,请在外部设置适当的保护电路。
◆ 请勿在本产品所记载的规格范围之外使用。
否则可能导致触电、火灾、故障。
◆ 请勿使用在易燃、易爆气体的场所。
◆ 请勿触摸电源端子等高电压部位。
否则有触电的危险。
◆ 请勿拆卸以及改造本产品。
否则可能导致触电、火灾、故障。
◆ 请不要使用在原子能设备以及与生命相关的医疗器械等设备上。
◆ 本产品的所有输入输出信号线,为了防止浪涌发生,请设置适当的浪涌抑制电路。
◆ 本产品的安装形式为盘式安装,为了避免用户接近电源端子等高电压部分,请在最终产品上采取必要措施。
◆ 为了防止仪表损坏和防止机器故障,请在与本仪表接续的电源线或大电流容量的输入输出线上,安装适当容量的保险丝等安全断路器件保护仪表。
◆ 请不要将金属片或导线碎屑混入本产品中,否则可能导致触电、火灾、故障。
◆ 请确实地拧紧端子螺丝,如果不完全拧紧,可能导致触电、火灾。
◆ 请务必在切断电源后再进行清洁。
◆ 清洁时,请用干的软布擦去本产品的污垢。
请不要使用吸湿剂。
否则可能导致变形、变色。
◆ 请不要使用硬物擦蹭或敲打显示部分。
◆ 本产品的安装、调试、维护应由具备资质的工程技术人员进行。
◆ 为了长期安全地使用本产品,定期维修是必要的。
本产品的某些部件有的受寿命限制,有的因常年使用性能会发生变化。
◆ 本说明书如有变动,恕不通知,随时更新,查阅时请以最新版本为准。
如有疑问,请与本公司联系。
◆ 本公司不承担除产品本身以外的任何直接或间接损失。
为了防止触电和防止机器故障,请务必在关断电源后,再进行本机器的安装、拆卸。

GNSS位移监测站说明书GNSS位移监测站由内置GNSS接收机、传输模块、物联网卡、天线、锂电池、太阳能充电控制器和解析软件组成,安装方便快捷。
接收机采用高精度多模多频板卡,根据不同的需求配置不同的北斗/GNSS板卡,数据通信方式采用无线电或网络方式,可以作为基准站或移动站使用设备参数信号: GPS: LlC/A, L2C北斗:B1I, B2IGLONASS: L1OF, L2OFGalileo: E1-B/C, E5b单点定位精度:<1.5mRTK定位精度:水平∶±2.5mm垂直∶±2.5mm初始化可靠性:大于 99.9%首次定位时间-电台方案:冷启动<30s 温启动<30s 热启动<30s 数据更新率:1Hz数据格式:NMEA-0183防尘防水:IP67级标准功耗:小于2.5W其他参数◇信号传输:4G无线数据传输、470MHz无线组网、RDSS北斗短报文通讯◇供电:太阳能+锂电池组合供电◇工作温度:-40~85℃◇工作湿度:0~95%RH(非凝露)◇太阳能板: 10W◇锂电池:10.4Ah◇上报间隔:1分钟~24小时可设置,支持密报产品特色◆采用北斗,GPS,GLONASS和伽利略四星12频GNSS模块,可单卫星系统定位,也可联合RTK定位◆高度灵活的分体式设计,适用于变形监测、网络参考站、驾考系统、机械控制等系统集成。
◆470MHz无线电台适用基准站和流动站作业,通讯协议支持透明传输、TT450S◆预留以太网、4G通讯◆支持GPS信号和L2C现代化改造后的GPS信号◆支持自动差分,差分格式支持RTCM2.X、RTCM3.X以及CMR◆可远程设置、下载、查看数据等等。
◆微信查看及预警功能,实时掌握设备信息,及时获取异常报警信息。
S D W系列多点位移计使用说明书1 简述 ............................................................................................................................................. -2 -2 特性 ............................................................................................................................................. - 2 -3 技术指标...................................................................................................................................... - 2 -4 验收与保管.................................................................................................................................. - 2 -5 检验及安装埋设.......................................................................................................................... - 3 -6 测读方法...................................................................................................................................... -7 -7 结果计算...................................................................................................................................... - 8 -SDW系列多点位移计使用说明书1 简述SDW系列多点位移计由位移传感器,位移传递杆、保护管、锚头等组成的长距离位移监测仪器,除保护管和锚头外,均使用不锈钢材料制成。
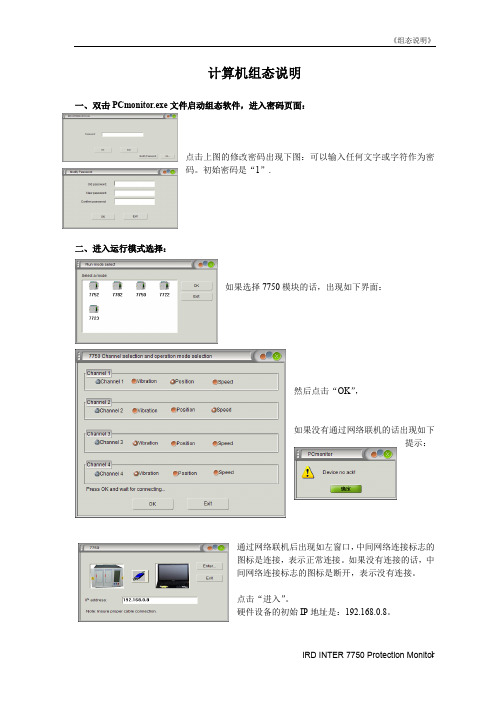
计算机组态说明一、双击PCmonitor.exe文件启动组态软件,进入密码页面:点击上图的修改密码出现下图:可以输入任何文字或字符作为密码。
初始密码是“1”.二、进入运行模式选择:如果选择7750模块的话,出现如下界面:然后点击“OK”,如果没有通过网络联机的话出现如下提示:通过网络联机后出现如左窗口,中间网络连接标志的图标是连接,表示正常连接。
如果没有连接的话,中间网络连接标志的图标是断开,表示没有连接。
点击“进入”。
硬件设备的初始IP地址是:192.168.0.8。
Channel 1、Channe2、Channe3、Channe4,实时显示各通道信息:仪表类型:包括Vibration、Position、Speed。
重新参数设置并下载后,上位机和仪表的类型参数便可统一。
Value:数据的实测数值。
小数点后三位有效数字。
Transducer status:显示传感器是否工作正常。
Gap:显示使用者观察用直流值,小数点后三位有效数字。
4-20mA output:显示仪表输出的4-20mA值,小数点后三位有效数字。
Alert:显示警告继电器状态,超出警告门限则报警,并弹出复位按钮。
Danger:显示危险继电器状态,超出危险门限则报警,并弹出复位按钮Relay:如果继电器跳闸的话,且该通道设置的“Latching”参数值是“YES”的话,则只能通过手动点击相应的“Reset”按钮才能复位继电器。
如果“Latched”值是“NO”,则当下位机设备检测到报警已经清除的话会自动复位该继电器。
Relay state:显示7个继电器的工作状态,如果处在“Failsafe”状态下,正常工作状态是下排的红色灯亮,继电器动作时下排的红色灯灭而上排绿色灯闪烁。
如果处在“非Nof ailsafe”状态下,除0号继电器意外(系统继电器只有安全模式),正常工作状态是上排的绿色灯亮,继电器动作时上排的绿色灯灭而下排的红色灯闪烁。
UFOU3RTK测量仪器操作使用说明UFO U3 互联网测量RTK仪器操作使用说明U3 接收机主机组件U3 LED 指示灯UFO U3 指示灯为复用跑马型指示灯,用户可以通过指示灯的颜色和动态图形来判断设备的工作状态。
U3 电源指示灯电源指示灯为U3 接收机电源电量,用户可以根据指示灯的状态来判断设备的电源状态。
U3 按键U3 SIM 卡放置U3 接收机内置全网通4G 网络模组,用户可以放置设备中使用网络进行1+1 差分数据的传输或网络CORS 的接入。
1. 打开设备电源及数据传输口保护盖;2. 按图形提示方式SIM 卡;3. 重新启动接收机即可使用网络模组。
UFO U3 产品SIM 卡不支持热插拔,用户需要在关机状态下进行SIM 的放置,或放置完成后重启设备才能正常使用网络模组。
U3 充电将USB-TypeC 电源线分别插入U3 接收机和标准配置的充电器,将充电器接入电源,U3 的LED 指示灯会提供充电进度,LED 灯常亮充电完成。
U3 数据传输将USB-TypeC 数据线分别插入U3 接收机和接收机,打开接收机电源,设备提示“是否连接电脑”,5 秒内按电源键确认电脑连接模式,用户可以使用U 盘模式进行数据的下载工作。
U3 WebUI 操作U3 接收机支持WebUI 模式,用户可以使用WiFi 连接接收机并通过WebUI 来对接收机进行设置、数据下载、固件升级等工作。
1. 打开U3 接收机的WiFi 模式;2. 在移动端搜索U3 接收机编号的热点并进行连接;3. 在浏览器页面输入:192.168.10.1进入U3 WebUI 设置页面;4. 输入管理密码:password 即可对接收机进行设置、数据下载、固件升级等操作。
仪器架设-基准站基座对点器和三脚架非UFO 标准配置附件,用户可单独采购。
用户可以根据作业环境来合理选择数据链路类型,如使用TRU35 大电台等。
仪器架设-流动站用户需保障流动站数据链路的类型及差分数据协议和基准站保持一致。
1位移检测仪表原理、结构和应用1.1位移检测仪表原理、结构1.1.1位移检测概述(1)传感器的分类传感器是一种以测量为目的,以一定的精度把被测量转换为与之有确定关系的、便于处理的另一种物理量的测量器件。
传感器的输出信号多为易于处理的电量,如电压、电流、频率等。
传感器由敏感元件(Elastic sensor)、传感元件及转换电路三部分组成。
敏感元件是在传感器中直接感受被测量的元件。
即被测量x通过传感器的敏感元件转换成一与x有确定关系的非电量或其它量。
这一非电量通过传感元件后就被转换成电参量。
转换电路的作用是将传感元件输出的电参量转换成电压、电流或频率量。
应该指出,不是所有的传感器都有敏感、传感元件之分,有些传感器是将二者合二为一了。
传感器的种类繁多,分类方法也不尽相同,一般常用的分类方法有两种:一种是按被测对象的参数分类;另一种是按传感器的变换原理分类。
此外,还有其他的分类方法,如按传感器材料分类,按传感器本身是否能产生电动势分类和按输入、输出特性分类等。
①按被测对象的参数分类的传感器有:温度传感器、压力传感器、位移传感器、流量传感器、液位传感器、力传感器、力矩传感器、加速度传感器、流速传感器、振动传感器等。
②按变换原理分类的传感器有:电阻式传感器、电容式传感器、电感式传感器、压电式传感器、光电式传感器、光栅式传感器、热电式传感器、红外传感器、光纤传感器、超声波传感器、激光传感器等。
有时人们常把被测参数和变换原理结合在一起来称呼传感器,例如电阻式压力传感器、电容式液位传感器、压电式加速度传感器等。
③按传感器输出信号的性质分类有:输出为开关量(“1”和“0”或“开”和“关”)的开关型传感器;输出为模拟型传感器;输出为脉冲或代码的数字型传感器。
④按照其用途,传感器可分类为:压力敏和力敏传感器,位置传感器,液面传感器,能耗传感器,速度传感器,热敏传感器,加速度传感器,射线辐射传感器,振动传感器,湿敏传感器,磁敏传感器,气敏传感器,真空度传感器,生物传感器等。
EN2000A2轴位移/胀差监测仪使用说明书前言非常感谢购买、使用我公司产品,本手册详细描述了产品功能、安装、接线、操作及维护方法,请在使用前仔细阅读本手册内容。
我公司保留因产品改进升级而改变本手册内容的权利,如果不经预告予以更改手册,敬请谅解,如有不详之处,请联系本公司技术部或当地经销商。
产品在出厂前,已经过严格的质量检测,用户在收到此产品后,请仔细核对规格型号、检查产品有无损伤,附件是否齐全。
完整包装包括:●主机●使用说明书●表卡(已经附在主机上●通讯软件(软盘或光盘,单独订货●产品检验合格证1.概述对于旋转机械来说,轴的轴向位置是重要的测量参量之一,轴位移可以反映出轴在轴向相对于止推轴承之间的相对位置,轴向位置的变化可以表明机器的运行特性和状况,检测出止推轴承的磨损情况,从而保证消除机器转子与定子之间可能发生的轴向摩擦。
对轴向位置进行长期连续监测,可以防止轴向止推轴承的故障发生,保护机器的安全。
对于一些大型机械设备,在使用过程中,由于不同部件的热膨胀比率不同,部件相互之间就可能发生摩擦而使机器受到损害。
此外,还要对机壳进行机壳膨胀的测量,以保证设备的正常运行。
EN2000A轴位移/胀差监测仪,是一台单道位移监测仪表,可以提供完善的、高质量的轴位移/胀差在线监测。
该仪表智能化程度高,通过面板上的按键及显示实现所有监测参数的设置和各种功能的操作,可以对传感器进行连续地自诊断,提供高精度标准电流输出(0~10mA、0~20mA或4~20mA及RS-485通讯接口。
2.注意事项2.1安装1.本产品是盘装仪表,安装盘面厚度1.0~5.0mm2.使用环境无易燃及腐蚀性气体,无大的电磁干扰3.使用环境温度0~50℃4.使用环境湿度≤85%,无冷凝5.避免阳光直射、热风直吹6.避免对设备有振动和冲击7.避免接触水、油、盐分、药品、金属粉末,无易燃及腐蚀性气体,无强电磁场干扰2.2接线1.在断电状态下接线,接线完成后应认真检查连线是否正确,供电电源是否符合仪表要求,确认无误后方可上电使用2.各GND之间在仪表外部不允许直接连通,否则会增加测量误差3.传感器前置器与仪表端子间的信号传输线要求使用屏蔽电缆4.信号传输线应远离控制电缆和电源线5.避免金属物品掉进仪器内部6.本产品无电源开关和保险丝,如用户加装,建议保险丝规格:(0.5A/250VAC7.端子螺丝要按照标示的扭矩宁紧,否则容易引起触电、火灾,但是不要过分拧螺丝,否则会永久损坏8.建议使用φ5.5的压接线端子片2.3使用1.仪器工作时不要直接接触端子2.不要遮挡外壳的散热孔3.清洁仪器时务必切断电源,用软布擦拭外壳,禁止使用稀料等清洗外壳4.仪器的面板不要用硬物摩擦和敲打5.不要对本产品进行随意拆卸、修理或改造3. 仪表安装与接线3.1 仪表结构与盘面开孔{参考EN6000B5 160X80(横表图纸(显示、按键要修改}3.2仪表的装与拆{参考EN6000B5简图(显示、按键要修改}3.3接线图4.主要功能EN2000轴位移监测仪接收位移型传感器(涡流传感器输入信号。
瑞 视目录目录 (1)概述 (1)1.传感器静态特性校验——下位机操作说明 (3)1.1 接入被校传感器信号 (3)1.2 接入供电电源(220VAC,50HZ) (4)1.3下位机静态线性特性校验部分 (5)1.3.1下位机校验软件界面说明 (5)1.3.2安装被校传感器于静态支架上 (6)1.3.3下位机静态校验参数设置 (7)1.3.4下位机静态校验 (8)1.3.5下位机静态校验数据报表查看 (8)1.3.6校验数据项删除 (10)1.3.7校验数据上传 (11)1.3.8校验数据保存 (11)1.3.9静态校验过程流程图 (12)2.传感器动态特性校验——下位机操作说明 (13)2.1 接入被校传感器信号 (13)2.2 接入供电电源(220VAC,50HZ) (13)2.3下位机操作平台系统参数设置 (13)2.3.1下位机触摸屏校准 (13)2.3.2下位机通讯网络连接设置 (13)2.4下位机动态特性校验部分 (14)2.4.1下位机校验软件界面说明 (14)2.4.2安装被校传感器于动态支架上 (14)2.4.3下位机动态校验参数设置 (16)2.4.4下位机动态校验 (18)2.4.5下位机动态校验数据报表查看 (20)2.4.6动态校验数据项删除 (21)2.4.7动态校验数据上传 (22)2.4.8动态校验数据保存 (22)2.4.9动态校验过程流程图 (23)3.下位机键相信号提供部分 (24)3.1 键相探头安装 (24)3.2 键相信号参数设置 (24)上海瑞视仪表电子有限公司RS9998A全自动精密振动位移校验仪4.传感器静态特性校验——上位机操作说明 (25)4.1 上位机网络连接参数设置 (25)4.2 上位机软件的安装 (26)4.3 运行校验仪上位机软件 (28)4.4 静态校验上位机界面说明 (29)4.5 静态校验上位机数据表单 (31)4.6 静态校验上位机数据保存 (32)4.7 静态校验上位机数据打印 (32)5.传感器动态特性校验——上位机操作说明 (33)5.1 上位机网络连接参数设置 (33)5.2 上位机软件的安装 (33)5.3 运行校验仪上位机软件 (33)5.4 动态校验上位机界面说明 (33)5.5 动态校验上位机数据表单 (34)5.6 动态校验上位机数据保存 (37)5.7 动态校验上位机数据打印 (38)上海瑞视仪表电子有限公司 RS9998A 全自动精密振动位移校验仪第1页RS9998A 全自动精密振动/位移校验仪概 述迄今为止,在电力(火/水电厂)、石化、冶金等大型旋转机械设备行业,国外/国内厂家在校验轴位移/振动/摆度/偏心系统方面研究/生产过不同类型的校验设备,但这些设备始终都还没有实现校验位移/振动/摆度/偏心系统(传感器+位移/振动/摆度/偏心监视仪等)的动态幅频特性曲线和静态线性特性曲线,这种设备本身的标准性差,振动频率调整范围小(更无法在低频/超低频段校验振动/摆度/偏心系统),智能数据分析/处理、通讯功能缺乏,校验繁琐,校验数据结果人为因素大。
DF2900可编程TSI仪表组态软件位移(行程)类监测仪表参数组态1.概述如在〖DF2900可编程TSI仪表组态软件操作说明〗所述,我们要对DF系列监测仪表进行参数组态,以下步骤是标准的:1)计算机端串口电缆接好,启动计算机;2)传感器接好;3)将串口电缆插入仪表前面板接口,仪表通电;4)启动【DF2900可编程TSI仪表组态软件】;5)建立或打开仪表所在的工程;6)建立或打开仪表组态参数文件;并正确设定监测器编号、『产品ID』----产品出厂编号。
7)执行菜单操作:『通讯』----「连接」。
确认计算机与仪表通讯连接成功。
如有必要,执行菜单操作:『组态』----「读入」,从仪表读出所有组态参数,并覆盖仪表组态参数文件中的参数数据;8)执行菜单操作:『组态』----「编辑」,进行组态参数文件编辑;9)组态参数文件编辑完成后:执行『组态』----「试验」,将组态参数下载到仪表中运行;10)组态参数试验完成后:执行『组态』----「应用」,将组态参数下载并编程到仪表中;11)仪表自动复位,以新参数运行。
12)特别指出,在参数编程完成后,必须通过“组态-----试验”,并等待60秒后将继电器投入连锁运行。
不执行此步骤,所有继电器都可能被软件自动解除,不能投入运行。
我们把下列监测仪表都归为一类----【位移(行程)类监测仪表】:1)可设置组态配接电涡流位移传感器的以下监测仪表:DF2002 双通道轴向位移监测器DF2022 双通道相对膨胀监测器DF9002 双通道轴向位移监测仪DF9022 双通道相对膨胀监测仪DF3712 轴向位移变送器2)可设置组态配接LVDT传感器的以下监测仪表:DF2032 双通道热膨胀监测器DF2082 双通道阀位行程监测器DF9032 双通道热膨胀监测仪DF3931 热膨胀变送器打开位移(行程)类监测仪表的组态参数文件,执行菜单操作:『组态』----「编辑」,进入:【参数设置——轴向位移相对膨胀】窗口或:【参数设置——热膨胀行程】窗口二者实际是一样的,只是标题不同。
我们以【参数设置——轴向位移相对膨胀】窗口为例,它共有七个选项卡,单击每个选项卡上方的名称位置,将切换显示各个选项卡:组件基本设置选项卡,A通道设置选项卡,A传感器线性化选项卡,A传感器线性化选项卡,B通道设置选项卡,B传感器线性化选项卡,输出设置1选项卡,输出设置2选项卡。
各选项卡的内容简介如下:1)组件基本设置选项卡☉显示监测器所在系统名称、监测器编号、组件名称和产品ID;☉仪表基本设置,选择仪表工作方式、A(B)通道旁路或工作☉A(B)通道基本设置,可选择传感器类型、测量单位量纲等。
2)A通道设置选项卡☉传感器参数:传感器输出范围、线性范围、灵敏度等;☉测量参数:测量量程、零点电压和零点值等☉测量方向、斜面补偿、安全栅补偿、传感器线性修正:3)A传感器线性化选项卡对每个电涡流传感器,可以输入21组数据,对传感器进行线性修正;4)B通道设置选项卡参见A通道设置选项卡说明。
5)B传感器线性化选项卡参见A传感器线性化选项卡说明。
6)输出设置1选项卡该选项卡可单选设置仪表报警、危险组合逻辑,差值鉴别参与控制的方式、联锁控制是否投入等;7)输出设置2选项卡该选项卡可单选设置仪表报警电流、电压输出形式;OK、报警、危险限值、差值限值、继电器动作延时、报警回差等都可以设置。
2.组件基本设置▲『系统名称』、『仪表名称』、』『仪表编号』来自前面工程名称和组态参数文件名称中,这里不可改变;▲『产品ID』【仪表合格证】上或仪表后端子板上标明的〖产品出厂编号〗,应在打开或新建参数文件时正确设定,这里不可改变。
☆在仪表软件中,已存储固化了仪表的出厂编号;在每一次通讯过程中,计算机和仪表都要首先传送『产品ID』,并相互核对。
二者相同,通讯有效;二者不同,通讯中断,提示出错信息;▲『仪表工作方式』有如下四种,可以通过打开组合列表框来选择:1)单通道工作:两个通道中只能有一个可以工作;2)两通道独立测量:两个通道各自测量一个参数,彼此没有联系;3)两通道测量同一位移:两个通道测量同一个参数,比较两者的差值,差值过大时,进行相应控制处理;4)两通道补偿测量:每个通道测量参数的一部分,共同组合才能完成整个测量;注:打开组合列表框的操作方法:显示所选内容,列表同时关闭。
▲『A(B)通道激活』单选按纽可选择仪表通道工作或不工作。
其选择首先由仪表工作方式决定。
在『仪表工作方式』选择3)、4)时,A、B通道都必须选择工作。
在『仪表工作方式』选择1)时,两个通道中最多只能有一个可以选择工作。
在『仪表工作方式』选择2)时,两个通道都可以任意选择工作或旁路。
旁路:通道自动失效,不能进行监测;工作:通道进行监测工作;注:单选按钮的操作方法:▲『两通道监测同一量,一通道发生故障时,双通道变为单通道工作』只有在『仪表工作方式』设为两通道测量同一参数时:仪表自动切换:就是仪表判别出有一个通道发生故障,即自动变为单通道测量;手动软件编程测量:就是仪表判别出有一个通道发生故障,并不能变为单通道测量;而是要进入本窗口,将『仪表工作方式』设为单通道工作,并将故障通道旁路,然后将参数下载到仪表中。
▲『A(B)通道基本设置』根据实际连接的传感器选择配接传感器种类:电涡流传感器或LVDT传感器;传感器灵敏度单位一般缺省选择为:V/mm 。
仪表指示单位一般缺省选择为:mm 。
3.A(B)通道设置▲『传感器参数』输入或下拉选择传感器探头、前置器、延伸电缆型号。
电涡流传感器型号编辑,请在系统软件主窗口“选项”下按“电涡流传感器型号编辑”菜单,来建立自己的传感器型号表;负电压输出特性传感器输出范围、OK范围、线性范围、安装零点等的关系如下图所示:)正电压输出特性传感器的传感器输出范围、OK范围、线性范围、安装零点等的关系亦同上图,只是数值符号为“+”,而不是“–”。
特别申明:本软件不支持双向电压(电压输出部分为“+”,部分为“–”)输出特性的传感器。
要获得该类支持该类传感器的软件,请在订货前注明。
请最先输入传感器灵敏度:若是电涡流传感器,在【传感器产品检定数据表】中,给出了最小二乘法拟合直线方程:U = -4.002 X D +2.001。
其中的 -4.002 就是传感器灵敏度。
若是LVDT 传感器,一般填入:0.3 V/mm 左右,因为LVDT 传感器要求采用线性修正方式来测量,不必苛求准确数据,关键是符号不能为“-”。
注意:传感器灵敏度的符号千万不能省略或填错,因为软件中关于该传感器的其它电压量的符号均取自传感器灵敏度的符号。
输入传感器的输出范围上限电压、下限电压,一般直接选择缺省值;电涡流传感器,输入【传感器产品检定数据表】给出的线性范围远端电压和间距、近端电压和间距。
LVDT 传感器,在获得传感器线性化数据表后,得到相应的线性范围远端电压和间距、近端电压和间距。
▲ 『测量参数』输入仪表量程范围的上限值和下限值。
这里特别强调,仪表量程范围的上限值必须大于下限值。
如:上限值+5mm ,下限值-5mm ;上限值+35mm ,下限值0;上限值0mm ,下限值-5mm ;上限值-2mm ,下限值-5mm 等,这些都是正确;而上限值+5mm ,下限值+10mm ;上限值-10mm ,下限值-5mm 等都是错误的。
通道测量基准点(零点)的信号电压必须准确,方法有两种:1) 在传感器安装在零点位置时,按下〖采集〗键,通过仪表直接将传感器电压采集进来,我们一般推荐采用这种方法;2) 直接输入零点电压。
通道测量基准点(零点)的值按理想情况应该是“0”,但实际中总有可能存在误差,可以通过改变这个值来修正,如我们把通道测量基准点(零点)的值设为“0”,正确的通道测量基准点(零点)的信号电压也已下载到仪表中,如果仪表的显示值为“-0.05”, 我们把通道测量基准点(零点)的值设为“0.05”,再将设置下载到仪表中,这时仪表的显示值变为“0.00”;相应地,如果仪表的显示值为“0.04”, 我们把通道测量基准点(零点)的值设为“-0.04”,再将设置下载到仪表中,这时仪表的显示值变为“0.00”。
我们建议,一般在其它参数都设置正确并传送到仪表后,再来修正通道测量基准点(零点)的值。
▲ 『测量方向』在实际监测中,我们必须确定监测指示的方向(或值的正负定义)是哪一种:1) 被测面远离传感器探头端面为正向 2)被测面靠近传感器探头端面为正向▲ 『探头安装角度』通常,探头安装与被测面垂直(与被测体位移运动方向平行)时,测量所得即为被测体运动位移;探头被测体 - +探头被测体 + -当探头安装与与被测面不垂直(与被测体位移运动方向不平行)时,即我们常说的斜面测量时,需要对测量所得乘上一个斜面补偿系数。
如图所示: 斜面补偿系数 == 1 / Sin α▲ 『传感器线性补偿』传感器位移—电压特性总是存在非线性的,为了提高测量精度,我们常对传感器特性进行线性补偿。
我们可以根据需要选择『传感器线性补偿』是关闭或使用(对应的传感器线性化选项卡关闭或打开),但通常我们都推荐使用『传感器线性补偿』,具体补偿方法见A (或B )传感器线性化选项卡说明一节。
▲ 『安全栅配置』传感器安装在危险场合时,为了防爆,通常在传感器和仪表间加装安全栅,由于安全栅电阻的分压作用,将会引起传感器输出与仪表输入间的偏差,所以需要对仪表测得的值乘上一个补偿系数。
通常确定安全栅补偿系数的方法是,在连接安全栅的情况下,调整传感器输出到线性量程的80%左右,测出传感器输出电压U1,仪表也测得输入电压U2:补偿系数 = U1 /U24.A (B )传感器线性化只有在A (B )通道设置选项卡中,将『传感器线性补偿』设为使用,才出现下面的窗口。
任何一个传感器的位移—电压特性,我们都可以对其进行多达20段的折线补偿;〖传感器位移 --电压线性修正表〗可以通过如下方式获得:在现场安装好传感器后,在表格中位移mm 栏输入各点的位移间距(由小到大,值必须大于 零,如第一点位移为1mm ,逐点增加),然后将传感器间距调到相应点的位移间距,然后将鼠标光 标移到对应点的电压V 栏,然后按下【采集】键,仪表将自动采集到该点的电压值。
如窗口中,我们要输入第1点的修正数据,首先在第一点位移mm 栏输入位移1mm; 然后将传感器间距调到1mm; 将鼠标光标移到第1点的电压V 栏,按下【采集】键,仪表将自动采集到该点的电压值并填入栏中。
若出现采集错误,重新采集即可。
注:表格中重新填入的数据将变为红色。
〖传感器位移--电压线性修正表〗中位移mm 栏和电压V 栏中数据都必须由小到大,中间不 能空缺;如果不需要21点的修正数据,那么剩下的所有点都必须输入最后一个修正点对应的数 据。