基于CUDA的道路与地形融合算法
- 格式:doc
- 大小:28.50 KB
- 文档页数:7

基于CUDA并行计算的深度学习算法研究深度学习(Deep Learning)是一种基于神经网络的机器学习方法,其目的是通过大量数据训练出模型,实现对未知数据的预测或分类。
近年来,随着计算机硬件和算法的不断进步,深度学习已经成为了人工智能领域的热门技术之一。
基于CUDA并行计算的深度学习算法是一种高效的实现方式,本文将探讨其研究现状及未来发展方向。
一、CUDA并行计算的基本原理CUDA是NVIDIA公司推出的一种并行计算架构和计算引擎,其核心是一种面向并行计算的通用编程语言CUDA C/C++。
在CUDA架构下,将CPU和GPU的计算资源分配到不同的设备上,利用GPU的并行处理能力加速计算过程。
CUDA 编写的程序可以实现跨平台的运行,极大地提高了并行计算的效率。
二、基于CUDA并行计算的深度学习算法研究现状在深度学习中,卷积神经网络(Convolutional Neural Network,简称CNN)是广泛使用的一种模型,其具有良好的空间和时间局部性。
因此,基于CUDA并行计算的CNN算法研究成为了重点。
目前,研究者们在这方面取得了很大进展:1. 更快的训练速度相较于传统的CPU并行计算,CUDA并行计算可以将计算和数据传输分配到不同的设备中,大幅提高计算效率。
这使得基于CUDA并行计算的深度学习算法在训练阶段中表现出更快的速度,并且能够处理更多的训练数据,得到更精确的模型。
2. 更高的灵活性和可扩展性CUDA并行计算不仅支持多GPU并行计算,而且还可以将多个计算任务分配给不同的GPU进行处理,以实现更高效的计算。
此外,CUDA并行计算还可以自适应调整计算资源的使用,以适应不同的应用场景和硬件环境。
3. 更高的算法复杂度基于CUDA并行计算的深度学习算法可以承载更多的计算负载和更高的算法复杂度。
这为研究者们实现更先进的深度学习模型提供了更加广泛的空间和机会。
三、基于CUDA并行计算的深度学习算法未来的发展方向目前,基于CUDA并行计算的深度学习算法已经取得了重要的研究进展。

道路数据融合算法Road data fusion algorithm is a critical component in modern transportation systems that aim to enhance the accuracy and reliability of spatial data. 道路数据融合算法是现代交通系统中的一个关键组成部分,旨在提高空间数据的准确性和可靠性。
This algorithm combines data from different sources such as satellite imagery, GPS tracking, and road network databases to create a unified and comprehensive dataset of road infrastructure. 该算法将来自不同源头的数据,如卫星图像、GPS跟踪以及道路网络数据库,结合在一起,创建一个统一和综合的道路基础设施数据集。
By merging and integrating these diverse data sources, the algorithm can provide more precise information about road attributes, such as road width, type, and condition. 通过合并和整合这些多样化的数据源,算法可以提供更精确的道路属性信息,如道路宽度、类型和状况。
One of the key challenges in road data fusion is handling and reconciling discrepancies between different datasets. 道路数据融合中的一个关键挑战是处理和协调不同数据集之间的差异。

面向GPU的地形遮蔽探测并行算法地形遮蔽探测是计算机图形学中的一个重要问题,它在许多应用领域中起着至关重要的作用,如游戏开发、虚拟现实和航空航天等。
GPU技术的快速发展使得对地形遮蔽的实时计算成为可能。
在本文中,我们将介绍一种面向GPU的地形遮蔽探测并行算法,该算法能够高效地处理大规模地形数据,并实现实时渲染。
1.引言地形遮蔽探测是指在三维场景中确定一个点是否被其他物体所遮蔽,即是否能够被观察到。
在传统的CPU算法中,需要对场景中的每个点进行逐一比较,计算量非常大,无法实现实时计算。
而GPU拥有并行处理能力强的特点,因此非常适合用于加速地形遮蔽探测。
2.算法原理我们的算法基于视锥剔除和可见性判断。
首先,将地形数据划分成多个小块,每个小块的大小可以根据需要进行调整。
然后,通过视锥剔除算法将不在视锥体内的小块排除掉,减少了需要进行可见性判断的范围。
接下来,将剩余的小块分配到GPU的处理单元中进行并行计算。
在每个处理单元中,对小块中的每个顶点进行可见性判断,判断方法可以采用光线投射等技术。
最后,将所有小块的结果进行合并,得到最终的地形遮蔽图。
3.并行算法设计为了实现高效的并行计算,我们可以使用CUDA或OpenCL等GPU编程框架。
首先,我们需要将地形数据从主内存中传输到GPU的显存中,以便在GPU上进行计算。
然后,我们可以使用GPU的线程块和网格的概念,将小块的计算任务分配给不同的线程。
在每个线程中,可以使用共享内存来存储小块的数据,以减少对显存的访问次数。
同时,通过合理设计计算任务的划分和线程的同步,可以充分发挥GPU的并行处理能力,提高计算速度。
4.实验与结果分析我们使用一台配备了NVIDIA GeForce RTX 3080显卡的计算机进行了实验。
我们选择了一块10000*10000的地形数据进行测试,设置了合适的小块大小。
实验结果表明,我们的算法能够实现实时的地形遮蔽探测,并且具有较高的计算效率和准确性。

CUDA环境下地形因子的并行计算陈亮;赵磊;李珂【摘要】为了满足栅格数据空间分析的高性能计算需求,本文以坡度计算为例,提出在CUDA环境下将串行地形因子算法进行并行优化的方法:根据地形因子计算过程中无数据相关性,适合进行数据并行计算的特点,将CPU上可以并行执行的计算任务通过CUDA并行处理机制映射到GPU线程块上,从而提高计算效率.试验测试了不同栅格规模下串行算法和并行算法的执行时间差异,测试结果表明,并行地形因子算法的性能明显优于串行算法,在网格规模为12800×11200时,获得最高串并加速比24.39.【期刊名称】《北京测绘》【年(卷),期】2017(000)004【总页数】4页(P9-12)【关键词】地形因子;并行计算;CUDA【作者】陈亮;赵磊;李珂【作者单位】西安测绘总站,陕西西安710054;西安测绘总站,陕西西安710054;西安测绘总站,陕西西安710054【正文语种】中文【中图分类】P208在水文监测、滑坡预警、工程选址、土地综合利用等地学分析工作中,地表形态与研究区域的地形属性和地形特征有着极为密切的联系,对栅格数据的地形分析是我们获取地形属性和地形特征,即研究区域地形因子的主要手段[1-2]。
随着遥感技术的不断发展,以栅格数据为主体的地理数据生成速度越来越快,分辨率越来越高,数据规模也越来越庞大[3],这使得传统的基于单核CPU或串行计算模式的地形分析手段无法满足海量数据地形分析方面的需求,地形因子计算效率的提升成为该领域一个亟待解决的问题。
当前地形因子计算的研究主要集中在窗口大小、模型类型、计算精度的研究上,而地形因子计算效率的提升则研究较少[4-6]。
随着多核与众核处理器系统的不断发展,并行计算的硬件基础所提供的硬件并行性也不断提高,并行计算通过扩大问题求解规模,一次可以同时执行多个计算子任务,这为海量栅格数据的高效、快速求解提供了便利,地形因子计算的程序开发也正从串行算法向并行算法转变[7]。
基于GPU并行处理的地形三维重建技术研究杨秀峰;靳海亮;臧文乾【摘要】介绍了一种基于GPU(Graphic Processing Unit)并行处理的地形三维快速重建算法.该算法利用分而治之的思想,基于CUDA编程框架,首先计算每一点的邻域信息,并在其切平面上进行局部的三角剖分,然后合并形成最终的地形网格.实验结果表明,基于GPU并行化处理的三维重建算法高效、稳定,可以快速的实现结构复杂的大规模地形的三维重建.【期刊名称】《江西科学》【年(卷),期】2014(032)001【总页数】4页(P22-25)【关键词】GPU;地形;三维重建【作者】杨秀峰;靳海亮;臧文乾【作者单位】河南理工大学,河南焦作454000;河南理工大学,河南焦作454000;中国科学院遥感与数字地球研究所,北京100101【正文语种】中文【中图分类】TP391.410 引言随着计算机科学和计算机图形学的发展,三维地形的应用范围不断扩大,越来越多的涉及虚拟与现实、战场环境仿真、土地管理与利用、地理信息系统、娱乐与游戏等大规模的三维地形应用中,因此,如何快速的实现大规模的地形重建是一个值得研究的问题[1]。
近年来,很多学者对基于点云的三维重建技术进行了研究。
目前基于点云的三维重建技术大致可划分为基于Delaunay三角剖分的方法、基于隐式曲面的方法和基于区域增长的方法[2]。
在众多基于Delaunay三角剖分的方法中,Amenta[3]等人提出的基于中轴逆变换的Power Crust算法最具代表性。
针对点云密度不均匀、带孔洞以及尖锐特征的任意点云,该方法都可重建出精密网格模型而不需要任何后期再处理,但是该算法需要进行复杂的三维Delaunay三角化处理,时间复杂度相当高,因此难以处理大规模地形的三维重建。
基于隐式曲面的方法的核心是如何选取适当的隐曲面模型,其中比较著名的算法有Carr[4]等人提出的基于径向基函数的方法,Alexa[5]等人提出的基于移动最小二乘的方法和Kazhdan[6]等人提出的基于泊松方程的方法。
基于CUDA的视频运动目标检测算法并行实现
楼先濠;郭春生;宋少雷;齐利泉
【期刊名称】《杭州电子科技大学学报》
【年(卷),期】2016(036)003
【摘要】在视频运动目标检测的能量优化算法中,引入目标先验约束信息,能有效地提高目标检测性能,同时也极大地增加了算法的复杂度.以CUDA平台为基础,从算法并行任务划分,实现粗细粒度并行;从合理规划GPU内存分配,提高数据的吞吐率两方面实现了带约束的能量优化视频运动目标检测算法的高效并行.实验结果表明,算法的GPU并行实现与CPU串行实现相比,显著提高了计算速度.
【总页数】5页(P23-26,35)
【作者】楼先濠;郭春生;宋少雷;齐利泉
【作者单位】杭州电子科技大学通信工程学院,浙江杭州310018;杭州电子科技大学通信工程学院,浙江杭州310018;杭州电子科技大学通信工程学院,浙江杭州310018;杭州电子科技大学通信工程学院,浙江杭州310018
【正文语种】中文
【中图分类】TN911.73
【相关文献】
1.基于CUDA的并行多尺度Retinex视频增强算法
2.基于CUDA的并行K-近邻连接算法实现
3.基于CUDA技术的DCT并行算法研究与实现
4.基于CUDA的
SKINNY加密算法并行实现与分析5.基于CUDA架构并行算法的带地形AMT二维反演实现与应用
因版权原因,仅展示原文概要,查看原文内容请购买。
一种基于地形匹配的自适应道路建模方法
王晨昊;汤晓安;陈敏;陈鸿
【期刊名称】《系统仿真学报》
【年(卷),期】2006(18)10
【摘要】道路建模是虚拟战场及数字城市等领域的重要研究内容之一。
以横截面道路模型结构[1]为基础,给出了一种基于地形匹配的自适应道路模型的构建方法。
通过引入道路控制点结构,为四种主要道路现象建立了模型,然后提出一种“预测-判断”匹配法,用来在各个控制点之间实时生成地形匹配的非均匀截面串。
算法可以较好的解决道路与地形的匹配问题,同时可以有效的降低道路模型的复杂度,提高渲染效率。
【总页数】3页(P2824-2826)
【关键词】道路建模;数字城市;地形匹配;几何建模
【作者】王晨昊;汤晓安;陈敏;陈鸿
【作者单位】国防科技大学电子科学与工程学院
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.一种基于混合高斯的双空间自适应背景建模方法 [J], 齐玉娟;王延江;索鹏
2.一种基于增量式SVR学习的在线自适应建模方法 [J], 王平;田华阁;田学民;黄德先
3.一种基于T-S模糊模型的自适应建模方法及其应用 [J], 赵恒平;俞金寿
4.一种基于T-S模型的快速自适应建模方法 [J], 岳玉芳;毛剑琴
5.一种基于自适应模糊高斯核聚类的软测量建模方法 [J], 夏源;杨慧中
因版权原因,仅展示原文概要,查看原文内容请购买。
一种基于混合结构的地形快速绘制算法
张立立
【期刊名称】《计算机应用与软件》
【年(卷),期】2010(027)012
【摘要】大规模地形绘制在虚拟现实等领域中有着广泛应用.针对实时场景漫游过程中对场景精度的要求,提出一种视点相关的混合结构的LOD简化算法,算法保留了四叉树结构与不规则三角网TIN(Triangulated Irregular Network)结构的优点,在宏观上以四叉树方法简化地形数据,在细节层次上使用不规则三角网表示地形,最后通过有效的误差控制原则,解决了四叉树结构分块间的连接问题.简化了算法实现,提高了算法效率,在重建速度上有了一定的提高.
【总页数】4页(P280-283)
【作者】张立立
【作者单位】哈尔滨金融高等专科学校,黑龙江,哈尔滨,150030
【正文语种】中文
【相关文献】
1.一种基于GPU的大规模地形绘制算法 [J], 沈明玉;江红
2.一种基于修正Bresenham算法的快速三角形绘制新算法 [J], 谢剑斌;郝建新
3.一种基于空间索引技术的全局光照快速绘制算法 [J], 熊德华;秦开怀
4.移动设备上基于地形高度场的快速绘制算法 [J], 文江;朱宝山;王番;张亮
5.一种基于硬件tessellation的地形绘制算法 [J], 夏乙;罗能;刘自昆;朱庆生;辜永成;王冬;;;;;;
因版权原因,仅展示原文概要,查看原文内容请购买。
基于CUDA的道路与地形融合算法摘要:将三维可视化技术引入到高速公路的道路设计过程当中能极大提高设计效率,方便优化设计效果。
在此过程中涉及到大量的耗时计算,其中最主要的计算为道路和地形融合算法。
传统的计算过程因为硬件和软件的限制,计算速度一直受到比较严重的制约。
本文利用gpu技术的最新进展,将基于gpu硬件的cuda编程技术应用到道路与地形融合算法当中,通过将传统算法改造成适合运行在gpu上的并行化算法,极大地提高了图形的融合速度,缩短了用户等待的时间,改善了用户体验。
通过比对不同的融合算法,结果显示基于cuda的道路和地形融合算法在保证结果正确的前提下极大地提高了融合速度。
abstract: introducing three-dimensional visualization technology into the design process of expressway can greatly improve the design efficiency and help optimizing the design effect. this process involves a lot of time-consuming calculation; the main of which is the fusion algorithm of road and terrain. due to the limitation of hardware and software in traditional calculating process, the calculating speed has been restricted a lot. with the help of the latest development of gpu technology, this paper applies cuda programming technique based on gpu hardware into the fusion algorithm of road and terrain. by transforming thetraditional algorithm into parallel algorithm which is suitable for running on gpu, the fusion speed of drawings has been greatlly improved, and user’s waiting time shortened and thus user’s experience improved. through the comparision of different fusion algorithms, the result shows that the fusion algorithm of road and terrain based on cuda greatly improved the fusion speed on the premise of ensuring correct result.关键词:道路与地形融合算法;cuda;三维可视化技术;并行化算法key words: fusion algorithm of road and terrain;cuda;three-dimensional visualization technology;parallel algorithm中图分类号:tp391.9 文献标识码:a 文章编号:1006-4311(2013)21-0227-020 引言在可视化的道路设计过程中,设计完道路线路及优化完线路以后,还需要将道路和当前的地形进行剪切融合一体化显示,只有经过融合后的图形显示后才能更加具有真实感。
因此提高融合的质量和速度对于整个可视化道路设计过程具有重要的意义[1、2]。
道路设计中的融合主要是指道路和地形的融合。
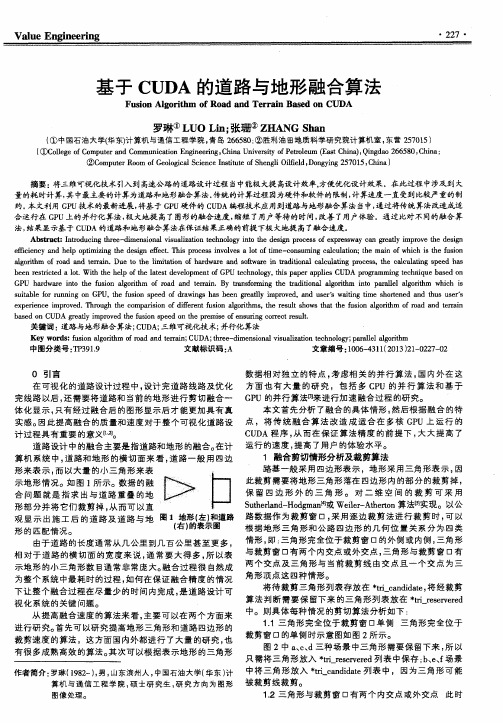
在计算机系统中,道路和地形的横切面来看,道路一般用四边形来表示,而以大量的小三角形来表示地形情况。
如图1所示。
数据的融合问题就是指求出与道路重叠的地形部分并将它们裁剪掉,从而可以直观显示出施工后的道路及道路与地形的匹配情况。
由于道路的长度通常从几公里到几百公里甚至更多,相对于道路的横切面的宽度来说,通常要大得多,所以表示地形的小三角形数目通常非常庞大。
融合过程很自然成为整个系统中最耗时的过程,如何在保证融合精度的情况下让整个融合过程在尽量少的时间内完成,是道路设计可视化系统的关键问题。
从提高融合速度的算法来看,主要可以在两个方面来进行研究。
首先可以研究提高地形三角形和道路四边形的裁剪速度的算法,这方面国内外都进行了大量的研究,也有很多成熟高效的算法。
其次可以根据表示地形的三角形数据相对独立的特点,考虑相关的并行算法,国内外在这方面也有大量的研究,包括多cpu的并行算法和基于gpu的并行算法[3]来进行加速融合过程的研究。
本文首先分析了融合的具体情形,然后根据融合的特点,将传统融合算法改造成适合在多核gpu上运行的cuda程序,从而在保证算法精度的前提下,大大提高了运行的速度,提高了用户的体验水平。
1 融合剪切情形分析及裁剪算法路基一般采用四边形表示,地形采用三角形表示,因此裁剪需要将地形三角形落在四边形内的部分的裁剪掉,保留四边形外的三角形。
对二维空间的裁剪可采用sutherland-hodgman[4]或weiler-atherton算法[5]实现。
以公路数据作为裁剪窗口,采用逐边裁剪法进行裁剪时,可以根据地形三角形和公路四边形的几何位置关系分为四类情形,即:三角形完全位于裁剪窗口的外侧或内侧,三角形与裁剪窗口有两个内交点或外交点,三角形与裁剪窗口有两个交点及三角形与当前裁剪线由交点且一个交点为三角形顶点这四种情形。
将待裁剪三角形列表存放在*tri_candidate,将经裁剪算法判断需要保留下来的三角形列表放在*tri_reservered中。
则具体每种情况的剪切算法分析如下:1.1 三角形完全位于裁剪窗口单侧三角形完全位于裁剪窗口的单侧时示意图如图2所示。
图2中a、c、d三种场景中三角形需要保留下来,所以只需将三角形放入*tri_reservered列表中保存;b、e、f场景中将三角形放入*tri_candidate列表中,因为三角形可能被裁剪线裁剪。
1.2 三角形与裁剪窗口有两个内交点或外交点此时情形如图3所示。
图3中a、b两种情形裁剪的情况分别对应图4中a、b。
这两种情况拆分后都生成三个三角形,位于裁剪线左侧的三角形都存入列表*tri_reservered中,位于裁剪线右侧的三角形都存入*tri_candidate中。
图3中c、d两种情况由于和当前裁剪线没有相交,整个三角形存入*tri_candidate中。
1.3 三角形与裁剪窗口有交点且一个交点为三角形的顶点此时的情形如图5所示。
对于上图5(a)情形,求出第三边与裁剪边的交点,将原三角形分为裁剪边左边和右边两个三角形,左边三角形存入*tri_reservered,另一边三角形存入*tri_candidate中。
其余情形裁剪对三角形的分拆比较简单,如果裁剪边的一个或者两个顶点位于三角形内部,就分别将裁剪边的顶点连接到三角形的另两个顶点,分拆后的三角形如果位于裁剪边的左边,则放入*tri_reservered,其余的三角形列入列表*tri_candidate中。
1.4 三角形与裁剪窗口有两个交点的其它情况如图6所示,三角形与裁剪边(包括裁剪边延长线)有两个交点的情形有如图6几种情况。
对于图6的各种情形,如果裁剪边顶点位于三角形内部,则连接该顶点与三角形的各个顶点,将原三角形拆分成若干小三角形,如果三角形位于裁剪边的左边则将其存入列表*tri_reservered中,否则放入*tri_candidate列表中。
以图6b为例,正确的拆分方法如图7所示,三角形ade、abd存入*tri_reservered中,三角形ace、cde、bcd存入*tri_candidate 列表中。
2 基于cuda的融合裁剪算法自从cuda架构诞生以来,基于gpu的大规模计算得到了广泛的应用。
基于cuda架构的设计将任务分到若干个block上执行,各个block之间相互独立,每个block又分为若干个thread,thread之间并行的执行任务,同一个block之内的thread之间存在较紧密的同步机制。
在存储器设计上,也分为全局显存、常量显存、纹理显存、block内共享显存、thread局部显存、thread寄存器等不同的层次。
在利用gpu进行大规模计算的时候,将并行计算部分放到设备上运行,利用cpu-gpu的协调工作来完成任务[6]。
基于以上cuda软件架构及存储器特点,block内的并行任务要尽量相同并且有一定的数据关联才能最大限度地利用gpu的计算性能。
根据这个要求将路基与地形剪切任务按以下流程进行设计。
以上算法的关键在于按照各种情况进行分类,并将相同类的任务尽量放到同一个block内进行并行处理,由于地形数据量极其巨大,所以分类工作能减少half-warp内的分支,从而能提高程序的并行效率。
3 实验结果及讨论综上所述,本文将地形和道路的融合任务分为两个步骤,首先判断地形和道路的位置关系并依据该位置关系将待处理地形三角形进行分类,然后将具有相同位置关系的三角形分配到同一个block 中求交点位置等计算,最后按照本文讨论的拆分策略进行地形三角形拆分到相应的数据结构中。
经过大量的实验显示,采用本文介绍的方法能够充分利用cuda架构的优点,在保证融合精度的同时得到比较满意的融合速度。
参考文献:[1]朱娟,徐雪林.道路模型与tin地形无缝融合算法研究[j].微计算机信息,2009,8-3(25):146-148.[2]王光霞,刘宁,万刚.虚拟地形环境中道路与地形模型融合算法研究及精度评价[j].测绘学报,2005,11(34):337-342. [3]李建明,马淑芳,钱昆明.基于gpu加速的分形地形生成方法[j].2010,4(22):1075-1078.[4]ivan e. sutherland, gary w. hodgman. reentrant polygon clipping[j].communications of the acm.1974,1(17):32-42.[5]kevin weiler, peter atherton. hidden surface removal using polygon area sorting[j].siggraph ‘77 proceedings of the 4th annual conference on computer graphics and interactive techniques, 1977:214-222.[6]erik lindholem, john nickolls, stuart oberman, john montrym, nvidia. nvidia tesla: a unified graphics and computing architecture. micro, ieee, 2008, 28(2): 39-55.。