连续系统的频率发超前校正
- 格式:doc
- 大小:5.50 MB
- 文档页数:30


定常系统的频率法超前校正1问题描述用频率法对系统进行校正,是利用超前校正网络的相位超前特性来增大系统的相位裕量,从而提高系统的稳定性,致使闭环系统的频带扩展,以达到改善系统暂态响应的目的。
但系统频带的加宽也会带来一定的噪声干扰,为了系统具有满意的动态性能,高频段要求幅值迅速衰减,以减少噪声影响。
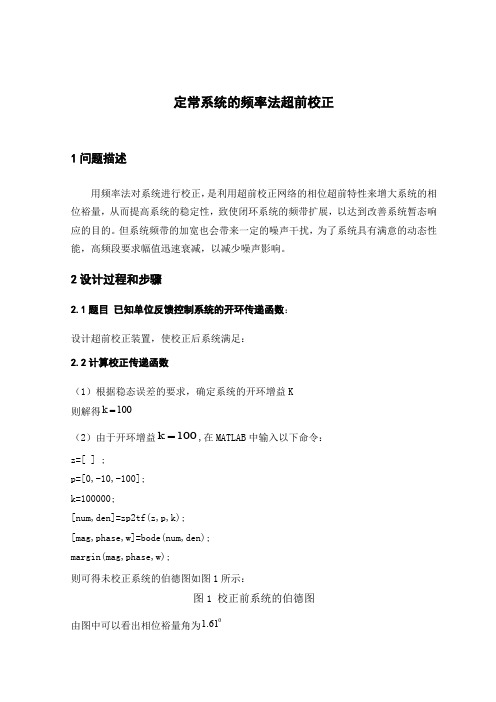
2设计过程和步骤2.1题目 已知单位反馈控制系统的开环传递函数:设计超前校正装置,使校正后系统满足:2.2计算校正传递函数(1)根据稳态误差的要求,确定系统的开环增益K则解得100k =(2)由于开环增益100k =,在MATLAB 中输入以下命令:z=[ ] ;p=[0,-10,-100];k=100000;[num,den]=zp2tf(z,p,k);[mag,phase,w]=bode(num,den);margin(mag,phase,w);则可得未校正系统的伯德图如图1所示:图1 校正前系统的伯德图由图中可以看出相位裕量角为061.1(3)谐振峰值为%0.161 1.250.4r M σ-=+=, 给定系统的相位裕量值1arcsin()53.1301r M γ==,由于未校正系统的开环对数幅频特性在剪切频率处的斜率为40/db dec -,一般取005~10ε=,在这里取为10,超前校正装置应提供的相位超前量φ,即:5201.611061.11301.531=+-=+-==εγγφφmε是用于补偿因超前装置的引入,使系统的剪切频率增大而增加的相角迟后量。
(4)根据所确定的最大相位超前角m φ,按下式计算相应的α(5)计算校正装置在m w 处的幅值110log α。
由于校正系统的对数幅频特性图,求得其幅值为110log α-处的频率,该频率m φ就是校正后系统的开环剪切频率c w ,即76.80==m c ωω(6)确定校正网络的转折频率和1ω、2ω4946.200644.076.8011=⨯===αωωm T ,(7)画出校正后系统的伯德图,并验算相应的相位裕量是否满足要求?如果不满足,则改变ε值,从步骤(3)开始重新进行计算。

目录1 超前校正的原理及方法 (2)1.1 何谓校正为何校正 (2)1.2 超前校正的原理及方法 (3)1.2.1 超前校正的原理 (3)1.2.2 超前校正的应用方法 (4)2 控制系统的超前校正设计 (5)2.1 初始状态的分析 (5)2.2 超前校正分析及计算 (8)2.2.1 校正装置参数的选择和计算 (8)2.2.2 校正后的验证 (10)2.2.3 校正对系统性能改变的分析 (14)3 心得体会 (16)参考文献 (17)控制系统的超前校正设计1 超前校正的原理及方法1.1 何谓校正 为何校正所谓校正,就是在系统中加入一些其参数可以根据需要而改变的机构或装置,是系统整个特性发生变化。
校正的目的是为了在调整发大器增益后仍然不能全面满足设计要求的性能指标的情况下,通过加入的校正装置,是系统性能全面满足设计要求。
1.2 超前校正的原理及方法1.2.1 超前校正的原理无源超前网络的电路如图1所示。
图1 无源超前网络电路图如果输入信号源的内阻为了零,且输出端的负载阻抗为无穷大,则超前网络的传递函数可写为1R1()1c aTsaG s Ts+=+ (2-1) 式中1221R R a R +=> , 1212R RT C R R =+ 通常a 为分度系数,T 叫时间常数,由式(2-1)可知,采用无源超前网络进行串联校正时,整个系统的开环增益要下降a 倍,因此需要提高放大器增益交易补偿。
根据式(2-1),可以得无源超前网络()c aG s 的对数频率特性,超前网络对频率在1/aT 至1/T 之间的输入信号有明显的微分作用,在该频率范围内,输出信号相角比输入信号相角超前,超前网络的名称由此而得。
在最大超前交频率m ω处,具有最大超前角m ϕ。
超前网路(2-1)的相角为()c arctgaT arctgT ϕωωω=- (2-2) 将上式对ω求导并令其为零,得最大超前角频率m ω(2-3) 将上式代入(2-2),得最大超前角频率(2-4) 同时还易知 ''m c ωω=ϕm 仅与衰减因子a 有关。

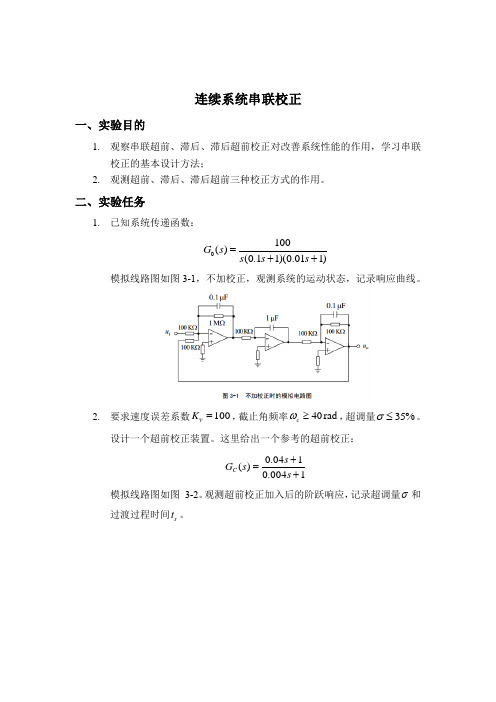
设 计 任 务题目: 超前校正一、设计内容设某控制系统不可变部分的传递函数为)11.0)(1001.0()(0++=s s s K s G ,要求该系统有如下性能指标:1)响应匀速信号r(t)=1R t 的稳态误差不大于0.0011R ,其中1R 为常量;2)剪切频率ωc =165rad/s ;3)相角裕度045γ≥;4)幅值裕度20lg g K ≥15dB 。
二、设计要求试应用频率响应法确定串联超前校正参数要求方法一用带惯性的PD 控制器实现串联超前校正方案1)劳斯判据判定未校正系统的稳定性,确定校正环节的传递函数模型。
2)计算校正系统的开环增益写出计算公式并通过MATLAB 编程计算,用MATLAB 画出未校正系统开环频率响应的Bode 图,计算未校正系统的剪切频率 ωc 写出计算公式并通过MATLAB 编程计算,相角裕度γ1写出计算公式,并通过MATLAB 编程计算。
3)根据给定的性能,计算要求校正后系统的剪切频率写出计算公式并通过MATLAB 编程计算,确定中频段宽度h 写出计算公式并通过MATLAB 编程计算。
4)计算最大超前相角m ϕ写出计算公式并通过MATLAB 编程计算。
5)计算串联超前校正参数a,T 写出计算公式并通过MATLAB 编程计算。
6)用MATLAB 验证性能四项指标,如果不符合修正校正参数继续验证,用劳斯判据和Nyquist 判据判定校正后系统稳定性。
7)设计校正环节的硬件参数,要求分别搭出无源校正和有源校正的电路图,确定电阻电容参数,用MATLAB 画出校正环节和最后的Bode 图,并进行对比说明。
要求方法二用PD 控制器实现串联超前校正方案1) 劳斯判据判定未校正系统的稳定性,确定校正环节的传递函数模型。
2) 根据要求求剪切频率ωc 计算出校正参数T 写出计算公式并通过MATLAB 编程计算。
3) 用MATLAB 验证性能四项指标,如果不符合修正校正参数继续验证,用劳斯判据和Nyquist 判据判定校正后系统稳定性。
第一章测试1.自动控制系统的工作原理是检测{偏差},再以{偏差}为控制作用,从而消除偏差。
()A:对B:错答案:A2.自动控制装置由{测量元件},{比较元件},调节元件,{执行元件}四部分组成。
()A:错B:对答案:B3.连续系统是指系统中各部分的输入和输出信号都是连续变化的模拟量。
()A:对B:错答案:A4.线性定常系统是用线性常系数微分方程描述的系统。
()A:对B:错答案:A5.给定输入是对系统输出量的要求值。
()A:对B:错答案:A6.被控量是指被控系统所要控制的物理量。
()A:对B:错答案:A7.被控对象是指被控制的机器,设备和生产过程。
()A:对B:错答案:A8.下列选项中,开环控制系统是指系统的输出量对系统()。
A:无控制作用B:其他选项都包括C:有无控制作用答案:A9.闭环控制系统是系统的输出量对系统有控制作用。
()A:对答案:A10.开环控制系统的特点是结构简单,无反馈,不能纠正偏差。
闭环控制系统的特点是能自动纠正偏差,需要考虑稳定性问题。
()A:错B:对答案:B第二章测试1.求图示系统的传递函数()A:B:C:D:答案:B2.下列选项中,求图示无源网络的传递函数G(S)==()A:B:C:D:答案:B3.下列选项中,求图示无源网络的传递函数G(S)==()A:B:C:D:答案:D4.下列选项中,求图示无源网络的传递函数G(S)=()A:B:C:D:答案:C5.用解析法列写线性系统的微分方程有哪些步骤?()。
A:确定输入输出、根据物理定律列元件各变量的微分方程、消中间变量、标准化B:确定输入、根据物理定律列元件各变量的微分方程、标准化C:确定输入输出、根据物理定律列元件各变量的微分方程、消中间变量D:确定输入、根据物理定律列元件各变量的微分方程、消中间变量、标准化答案:A6.传递函数与输入和初始条件无关。
()A:错答案:B7.物理性质不同的系统,完全可以有相同的传递函数。
()A:错B:对答案:B8.状态向量是以状态变量为元所组成的向量。