电力传动控制系统 - 终结版
- 格式:pdf
- 大小:1.18 MB
- 文档页数:7
第 1 章电力传动掌握系统的根本构造与组成1.依据电力传动掌握系统的根本构造,简述电力传动掌握系统的根本原理和共性问题。
答:电力传动是以电动机作为原动机拖动生产机械运动的一种传动方式,由于电力传输和变换的便利,使电力传动成为现代生产机械的主要动力装置。
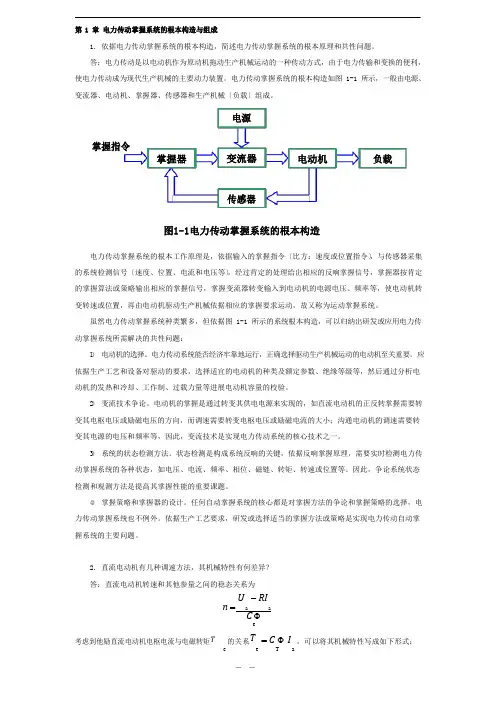
电力传动掌握系统的根本构造如图 1-1 所示,一般由电源、变流器、电动机、掌握器、传感器和生产机械〔负载〕组成。
电源掌握指令掌握器变流器电动机负载传感器图1-1电力传动掌握系统的根本构造电力传动掌握系统的根本工作原理是,依据输入的掌握指令〔比方:速度或位置指令〕,与传感器采集的系统检测信号〔速度、位置、电流和电压等〕,经过肯定的处理给出相应的反响掌握信号,掌握器按肯定的掌握算法或策略输出相应的掌握信号,掌握变流器转变输入到电动机的电源电压、频率等,使电动机转变转速或位置,再由电动机驱动生产机械依据相应的掌握要求运动,故又称为运动掌握系统。
虽然电力传动掌握系统种类繁多,但依据图 1-1 所示的系统根本构造,可以归纳出研发或应用电力传动掌握系统所需解决的共性问题:1)电动机的选择。
电力传动系统能否经济牢靠地运行,正确选择驱动生产机械运动的电动机至关重要。
应依据生产工艺和设备对驱动的要求,选择适宜的电动机的种类及额定参数、绝缘等级等,然后通过分析电动机的发热和冷却、工作制、过载力量等进展电动机容量的校验。
2)变流技术争论。
电动机的掌握是通过转变其供电电源来实现的,如直流电动机的正反转掌握需要转变其电枢电压或励磁电压的方向,而调速需要转变电枢电压或励磁电流的大小;沟通电动机的调速需要转变其电源的电压和频率等,因此,变流技术是实现电力传动系统的核心技术之一。
3)系统的状态检测方法。
状态检测是构成系统反响的关键,依据反响掌握原理,需要实时检测电力传动掌握系统的各种状态,如电压、电流、频率、相位、磁链、转矩、转速或位置等。
因此,争论系统状态检测和观测方法是提高其掌握性能的重要课题。
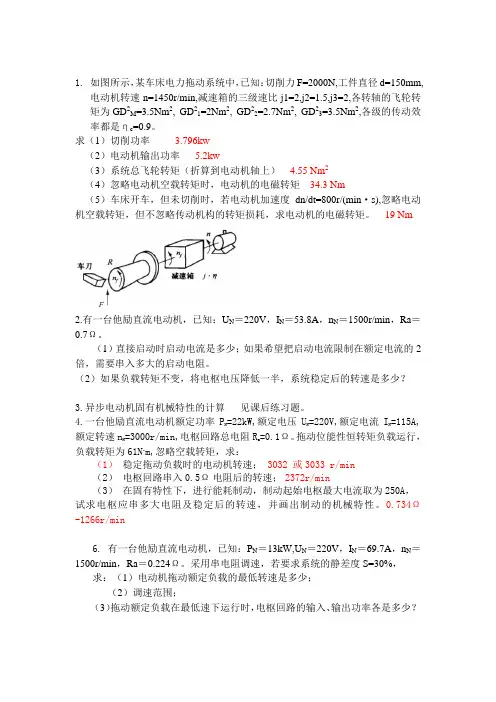
1.如图所示,某车床电力拖动系统中,已知:切削力F=2000N,工件直径d=150mm,电动机转速n=1450r/min,减速箱的三级速比j1=2,j2=1.5,j3=2,各转轴的飞轮转矩为GD2M=3.5Nm2, GD21=2Nm2, GD22=2.7Nm2, GD23=3.5Nm2,各级的传动效率都是ηc=0.9。
求(1)切削功率 3.796kw(2)电动机输出功率 5.2kw(3)系统总飞轮转矩(折算到电动机轴上) 4.55 Nm2(4)忽略电动机空载转矩时,电动机的电磁转矩34.3 Nm(5)车床开车,但未切削时,若电动机加速度dn/dt=800r/(min·s),忽略电动机空载转矩,但不忽略传动机构的转矩损耗,求电动机的电磁转矩。
19 Nm2.有一台他励直流电动机,已知:U N=220V,I N=53.8A,n N=1500r/min,Ra=0.7Ω。
(1)直接启动时启动电流是多少;如果希望把启动电流限制在额定电流的2倍,需要串入多大的启动电阻。
(2)如果负载转矩不变,将电枢电压降低一半,系统稳定后的转速是多少?3.异步电动机固有机械特性的计算见课后练习题。
4.一台他励直流电动机额定功率PN =22kW,额定电压UN=220V,额定电流IN=115A,额定转速nN =3000r/min,电枢回路总电阻Ra=0.1Ω。
拖动位能性恒转矩负载运行,负载转矩为61N·m,忽略空载转矩,求:(1)稳定拖动负载时的电动机转速;3032 或3033 r/min(2)电枢回路串入0.5Ω电阻后的转速;2372r/min(3)在固有特性下,进行能耗制动,制动起始电枢最大电流取为250A,试求电枢应串多大电阻及稳定后的转速,并画出制动的机械特性。
0.734Ω-1266r/min6.有一台他励直流电动机,已知:P N=13kW,U N=220V,I N=69.7A,n N=1500r/min,Ra=0.224Ω。

《电力传动控制系统》教学大纲一、课程地位与课程目标(一)课程地位随着电子、信息等高新技术的发展与进步,传统机电技术获得了改造、创新的可能和手段,电气工程及其自动化专业的学生除了需深刻理解电器、机械的原理和系统外,更需要具备运用电子技术((电力电子技术、微电子技术)、现代控制理论/技术实现传统机电系统高新技术改造的能力,为从事与电气工程专业有关的工作和科学研究打下一定的基础。
《电力传动控制系统》是电气工程及其自动化专业和自动化专业的核心课程,既有完整的理论体系,又有很强的实践性,是一门把理论基础和工具应用到工程实践中去的典范课程。
(二)课程目标1. 能够应用自动控制理论解决运动控制系统的设计问题(1.4)。
2. 能够应用自动控制理论分析运动控制系统的复杂工程问题(2.2)。
3. 具有电力拖动控制系统的工程开发和实验的基本能力(3.3)。
4. 能够基于自动控制理论对运动控制系统设计实验、仿真、分析与解释数据(4.3)。
5. 能够针对运动控制系统进行仿真与辅助设计(5.2)。
二、课程目标达成的途径与方法采用课堂教学的方法。
主要讲解转速开环控制的直流调速系统、转速闭环控制的直流调速系统、转速、电流双闭环控制的直流调速系统、直流调速系统的数字控制、基于稳态模型的异步电动机调速系统、基于动态模型的异步电动机调速系统、绕线转子异步电机双馈调速系统、同步电动机变压变频调速系统的概念、实现方法及具体的应用。
通过实例的讲解,使同学们更好地熟悉或掌握运动控制系统设计的方法和步骤,提高学生对电力传动系统的学习兴趣、培养学生应用理论基础和工具解决实际问题的能力。
课堂教学尽量引入互动环节,使同学们能更好地融入课堂教学,提高教学效果。
实验环节安排在专门的实验课程“电气控制专业实验”。
三、课程目标与相关毕业要求的对应关系2.毕业要求须根据课程所在专业培养方案进行描述。
四、课程主要内容与基本要求五、课程学时安排七、推荐教材与主要参考书(一)推荐教材1.《电力拖动自动控制系统-运动控制系统》(第5版).阮毅.机械工业出版社.2016年.(普通高等教育“十一五”国家级规划教材普通高等教育电气工程与自动化类“十三五”规划教材).(二)主要参考书:1. 《电力拖动自动控制系统》.李华德等.机械工业出版社.2009年2月.2. 《电力电子技术》(第五版).王兆安.机械工业出版社.2009年5月.3. 《电气传动实验指导书》. 中国计量大学.。
电力牵引传动控制系统:核心技术与应用优势一、电力牵引传动控制系统概述电力牵引传动控制系统,作为现代轨道交通领域的关键技术,以其高效、环保、低噪音等优势,逐渐成为我国铁路、城市轨道交通等领域的主流驱动方式。
该系统主要包括电力变换、电机控制、传动装置及监控系统等部分,通过先进的控制策略,实现列车牵引与制动的高效运行。
二、电力牵引传动控制系统的核心技术1. 电力变换技术电力变换技术是电力牵引传动控制系统的核心,主要包括整流、逆变和滤波等环节。
通过对输入的电能进行高效转换,为电机提供稳定、可靠的电源供应,确保列车在各种工况下都能实现优异的牵引性能。
2. 电机控制技术电机控制技术主要针对牵引电机进行精确控制,包括速度、转矩和位置控制等。
采用矢量控制、直接转矩控制等先进控制策略,实现电机的高效、稳定运行,降低能耗,提高列车运行品质。
3. 传动装置技术传动装置技术主要包括齿轮箱、联轴器等部件,将电机输出的动力传递到车轮,实现列车的牵引和制动。
通过优化传动装置的设计,降低噪音、提高传动效率,确保列车运行的安全性和舒适性。
4. 监控系统技术监控系统技术负责对整个电力牵引传动控制系统进行实时监控,包括故障诊断、保护、数据处理等功能。
通过集成化、智能化的监控手段,提高系统的可靠性和运行稳定性。
三、电力牵引传动控制系统的应用优势1. 节能环保电力牵引传动控制系统采用电能作为动力来源,相较于传统燃油驱动方式,具有显著的节能环保优势。
同时,系统的高效运行有助于降低能源消耗,减少污染物排放。
2. 运行速度快电力牵引传动控制系统具有较高的功率密度,能够实现列车的快速启动、加速和制动,提高运行速度,缩短运行时间。
3. 维护成本低相较于传统传动系统,电力牵引传动控制系统结构简单,故障率低,维护方便。
通过智能化监控手段,可实现故障预警和远程诊断,降低维护成本。
4. 噪音低、舒适性高电力牵引传动控制系统采用交流电机驱动,相较于直流电机,噪音更低,振动更小,提高了乘客的舒适度。
一、填空题(10分)每小题2分1.V-M系统的开环机械特性由连续段与断续断组成。
连续段的特性比较硬,改变控制角时是一族平行的直线,在断续区的特性呈现显著非线性,特性软,理想空载转速高。
2.单闭环调速系统采用PI调节器校正环节解决了动静特性间的矛盾,而保留电流截止环节是为解决启动时冲击电流过大的问题,当减速或停车时,由于可控硅电路的电流不能反向,不能产生制动转矩,欲要快速制动就需增设能耗制动线路。
3.静差率与机械特性的硬度有关,特性越硬,静差率越小,则稳态精度越高,同样硬度的特性,理想空载转速越低,静差率越大,则稳速的精度越差。
4.双闭环调速系统,在启动过程的大部分时间内,转速调节器处于饱和状态,此时它起着饱和非线性控制作用;当转速超调后,转速调节器退出饱和,它才真正发挥线性(速度)调节作用。
5.转速电流双闭环系统中,对于电网电压的波动电流调节器起主要抗扰调节作用,对于负载的波动转速调节器起主要的抗扰调节作用。
6.双闭环直流调速系统的启动过程可分为电流上升阶段、恒流加速阶段、转速调整阶段、稳定运行阶段。
7.环流可分为两大类:静态环流和动态环流。
8.在直流电机可逆调速系统中,欲消除环流可采用两种控制方法,即逻辑无环流和错位无环流。
9.可逆调速系统中可控硅电路逆变的主要用途:在直流电动机制动或减速时,把电动机的动能回馈给交流电源,一组可控硅由整流状态转变到逆变状态时,电压反向,电能由负载侧传送到交流电源侧。
10.逻辑无环流可逆调速系统使逻辑装置翻转的必要条件是转矩极性发生改变,充分条件是I d = 0,从发出逻辑指令到执行指令必需经过关断等待延时,这是为了防止I d 0,产生逆变颠覆;还必需经过触发等待延时,是为了防止SCR不关断,造成直流环流。
11.可逆系统的制动过程可分为;本组逆变阶段和它组制动阶段。
而后者又可分为:它组建流子阶段、它组逆变子阶段和反向减流子阶段。
12.可逆PWM变换器可分为:双极式可逆PWM变换器,同一桥臂的上下两个GTR同ON或OFF。

转速电流双闭环直流调速系统—---—-—基于MATLAB的仿真实验组员:王勇(201110231067)朱海(201110231057)艾合麦提江(201110231066)王志刚(20110231062)学院:物流工程学院专业:电气工程及其自动化班级: 电气112班目录一、前言 (3)二、课程设计的目的及内容 (3)2.1-课程设计的目的 (3)2。
2-课程设计的内容 (3)三、参数的选取与计算 (4)四、MATLAB仿真 (6)4。
1 开环直流系统的仿真 (6)4.2 转速单闭环系统的仿真 (9)4。
3电流、转速双闭环系统的仿真 (12)4。
3。
1基于动态结构图的双闭环直流调速系统仿真 (13)4。
3。
2基于Power System模块的双闭环直流调速系统仿真 (15)五、课程设计心得体会 (20)一、前言在单闭环的系统中,由于不能随心所欲的控制电流和转速的动态过程,因此不适用与要求调速性能较高的场合。
为了使系统在启动、制动的动态过程中,在最大的电流约束下,获得直流电动机最佳速度调节过程,就引入了转速 、电流负反馈双闭环直流调速系统,使得在电动机起动时转速调节器(ASR )饱和, ASR 不起作用 ,电流环调节器 (ACR)起主要作用 , 用以调节起动电流并使之保持最大值,使得转速线性变化,迅速上升到给定值 ;在电动机稳定运行时 , ASR 退出饱和状态,开始起主要调节作用 , 使转速跟随给定信号变化 ,电流环跟随转速环调节电动机的电枢电流以平衡负载电流。
但是 , 双闭环直流调速系统硬件的电气结构复杂 ,在研究和设计的过程中 ,许多参数的选择需要反复调试 , 需要我们花费大量的时间和精力。
而运用计算机仿真技术对系统进行仿真 , 可以方便地对参数进行设置 ,得到合理的参数组合,为系统的实现提供理论依据 。
鉴于上述理由 ,本文提出种面向控制系统电气原理结构图的转速 、电流双闭环不可逆直流调速系统仿真的新方法 。