ROSEMOUNT雷达液位计5600调试图解
- 格式:pdf
- 大小:266.91 KB
- 文档页数:8

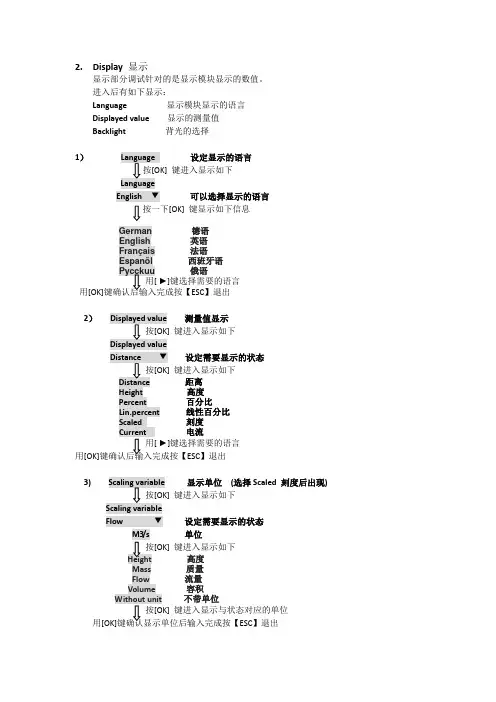
2. Display 显示显示部分调试针对的是显示模块显示的数值。
进入后有如下显示:Language 显示模块显示的语言Displayed value 显示的测量值Backlight 背光的选择1)设定显示的语言键进入显示如下可以选择显示的语言按一下[OK] 键显示如下信息德语英语法语西班牙语俄语►]键选择需要的语言用[OK]ESC】退出2)测量值显示键进入显示如下设定需要显示的状态键进入显示如下距离高度百分比线性百分比刻度电流键选择需要的语言用[OK]ESC】退出3) 显示单位(选择Scaled 刻度后出现)键进入显示如下设定需要显示的状态单位键进入显示如下高度质量流量容积不带单位键进入显示与状态对应的单位用ESC】退出显示单位选择Height 高度或Distance 距离ok后出现单位符号: m ft in cm mm供进一步选择显示单位选择Mess 质量ok后出现单位符号: kg t Ib 供进一步选择显示单位选择Flow 流量ok后出现单位符号:m3/s m3/h ft3/s ft3/min gal/s gal/min,gal/h l/s l/min l/h kg/s lb/s供进一步选择显示单位选择Volume 容积ok后出现单位符号: m3l hl ft3in3gal供进一步选择显示单位选择No unit 不带单位ok后出现单位符号: Without unit 不带单位4)(选择Scaled 刻度后出现)]键对100%0%赋值完成选择按【ESC】退出5)背光灯键进入显示如下状态开关关键进入显示如下询问开关是否打开键背光灯打开询问开关是否关闭键背光灯关闭根据需要自己选择需要的模式按【ESC】退出。
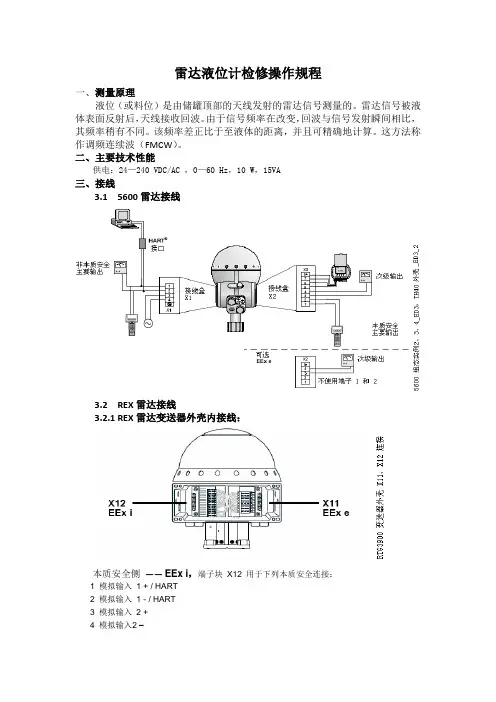
雷达液位计检修操作规程一、测量原理液位(或料位)是由储罐顶部的天线发射的雷达信号测量的。
雷达信号被液体表面反射后,天线接收回波。
由于信号频率在改变,回波与信号发射瞬间相比,其频率稍有不同。
该频率差正比于至液体的距离,并且可精确地计算。
这方法称作调频连续波(FMCW)。
二、主要技术性能供电:24—240 VDC/AC ,0—60 Hz,10 W,15VA三、接线3.1 5600雷达接线3.2 REX雷达接线3.2.1 REX雷达变送器外壳内接线:本质安全侧——EEx i,端子块X12 用于下列本质安全连接:1 模拟输入1 + / HART2 模拟输入1 - / HART3 模拟输入2 +4 模拟输入2 –5 DAU/RDU40 信号6 DAU/RDU40 电源7 DAU/RDU40 接地8 T1(温度传感器)9 T2(温度传感器)…..15 T8(温度传感器)非本质安全侧——EEx e ,端子块X11 用于下列基本类型连接1 电源L,L1+2 电源N,L2-3 现场总线4 现场总线5 -8继电器40REX 可连接一台标准数据采集单元(DAU)或独立式远传显示单元(RDU 40)。
3.2.2REX雷达变送器外壳内电子单元各卡件功能:见图3.2.2模拟处理卡件:APC 用于模拟输入信号的滤波和多路复用传输。
通过使模拟电路集中在单独的卡件高的信噪比。
变送器接口卡件:变送器接口卡件本质安全辅助输入要求使用变送器接口卡件(TIC)。
TIC 包括:两个进线安全栅和两个回线安全栅,用于4-20 mA 电流回路本质安全辅助输入要求使用变送器接口卡件(TIC);一个进线安全栅,用于下位机数据采集单元或本机显示单元;信号/电源连接,用于可选的温度多路复用器卡件(TMC)。
温度多路复用器卡件:TMC 温度多路复用器卡件(TMC)用于连接多达 6 台温度传达感器。
可支持单点温度传感器和平均温度传感器。
继电器输出卡件:ROC 继电器输出卡件(ROC)可连接两台继电器。


1Setup设定此处设定的是仪表的名称,容器的类型,最大最小的量程设定,阻尼时间,输出的模式按[OK]键后进入显示如下菜单:Measurementloopname仪表的名字Medium介质的类型Application容器的类型(有固液之分)Vesseltype容器底部形状Vesselheight/Me.range容器的高度3.1)选择固体后出现如下信息Application选择容器的类型按[OK]键进入显示如下ApplicationSilo选择容器的类型按[OK]键显示如下Silo筒仓Bunker煤仓Bunkerquickfilling物位变化快的煤仓Heap堆料Crusher压碎器Demonstration演示按[?]键选择以上显示类型按[OK]键完成选择按【ESC】退出3.2)选择液体后出现如下信息Application选择容器的类型6)Max.adjustment最大数值校准按[OK]键进入显示如下Max.adjustment100%可以更改的百分比数0.000m可以更改的上空距离数按一下[OK]键和[?]选择和更改百分比数按[+]输入需要更改的数值Max.adjustment100%可以更改的百分比数按[OK]键确认后出现如下Max.adjustment0.000m可以更改的上空距离数按一下[OK]键和[?]选择和更改上空的距离值确认后显示如下Failuremode22.0mA20.5mA Nochange此项是固定选取的项目<3.6mA按一下[?]键Displayedvalue显示的测量值Backlight背光的选择1)Language设定显示的语言按[OK]键进入显示如下LanguageEnglish▼可以选择显示的语言按一下[OK]键显示如下信息German德语English英语Fran?ais法语Espan?l西班牙语Pycckuu俄语用[?]键选择需要的语言,5)Backlight背光灯按[OK]键进入显示如下BacklightSwitchedoff状态开关关按[OK]键进入显示如下BacklightSwitchon?询问开关是否打开按[OK]键背光灯打开BacklightSwitchoff?询问开关是否关闭按[OK]键背光灯关闭根据需要自己选择需要的模式按【ESC】退出3.Diagnostics诊断此项内容包括的是对仪表状态诊断结果,包括仪表状态,峰值,电子部件温度,测量可靠性,模拟测量,信号曲线和虚假参数曲线。
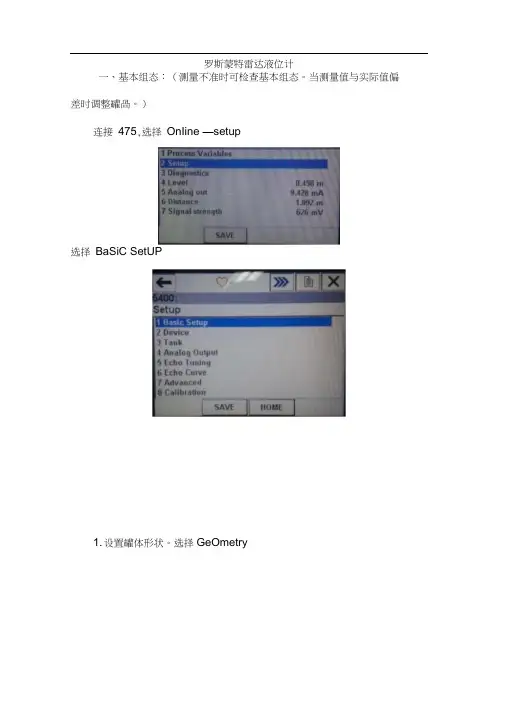
罗斯蒙特雷达液位计一、基本组态:(测量不准时可检查基本组态。
当测量值与实际值偏差时调整罐咼。
)连接475,选择OnIine —setup选择BaSiC SetUP1. 设置罐体形状。
选择GeOmetry严 UnkIiOwn (未东[])VertiCaI CyI (垂直圆筒〉TANK type V l HoriZClntal CyI (水平圆筒)〔罐的类型〉选择Tank type设置罐体形状SPheriCal (球形)CUbiCaI (立方形〉UnknoWn 广VertiCaI CylTANK type Horiz On tal Cy^(罐的类型)SPheriCaI CUbiCal (未知)(垂直圆筒)(水平圆(球形)(立方形)根据实际情况选择合适的形状确认后返回上一菜单,选择2 Tank bottom type设置罐底类型, 通常为Flat(未知)(平的)(圆的)(锥形的)(斜面)根据实际情况选择合适的形状。
确认后返回上一菜单,选择Tank height设置罐高,即空高,雷达法兰下表面至罐底距离。
在本例中空高为2.35米。
UnknoWn 广FlatTANK BoTToM^ Done(罐底类型)Co neFlat in cli ned -:HP∣Hfl⅛ PHUIi2. 设置工作环境。
确认后返回基本设置菜单,选择EnVironment ,设置工作环境根据实际情况选择工作环境,通常来说全部选择OFF如果污水池有浮渣、泡沫造成波动很大,可设置Foam为ON"扁Λ≡I 曹LUpf W IR Wl険爲"叽确认后,选择ProCeSS Condition 进入一3. 选择量程。
确认后返回基本设置菜单,选择Analog OUt进入, 设置4~20mA寸应的量程RaPid Chan gesTUrbUle ntTANK ENVlRoNMENT Foam(罐的工作环境)Solid(快速变化的)(剧烈起伏的)(有泡沫的)(波动大时选择)個体的)Al⅞r∏∣肆第一项Primary VariabIe 选择Level ,即输出液位。

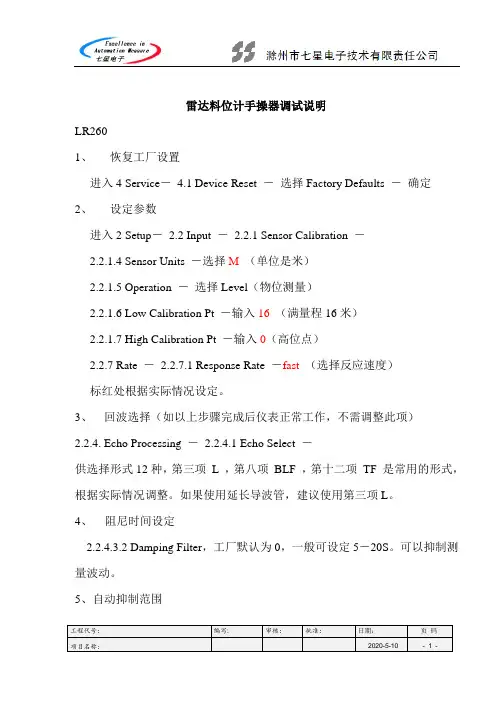
工程代号: 编写: 审核: 批准: 日期: 页 码雷达料位计手操器调试说明 LR260 1、恢复工厂设置进入4 Service - 4.1 Device Reset - 选择Factory Defaults - 确定 2、设定参数进入2 Setup - 2.2 Input - 2.2.1 Sensor Calibration - 2.2.1.4 Sensor Units -选择M (单位是米) 2.2.1.5 Operation - 选择Level (物位测量) 2.2.1.6 Low Calibration Pt -输入16 (满量程16米) 2.2.1.7 High Calibration Pt -输入0(高位点)2.2.7 Rate - 2.2.7.1 Response Rate -fast (选择反应速度) 标红处根据实际情况设定。
3、 回波选择(如以上步骤完成后仪表正常工作,不需调整此项) 2.2.4. Echo Processing - 2.2.4.1 Echo Select -供选择形式12种,第三项 L ,第八项 BLF ,第十二项 TF 是常用的形式,根据实际情况调整。
如果使用延长导波管,建议使用第三项L 。
4、 阻尼时间设定2.2.4.3.2 Damping Filter ,工厂默认为0,一般可设定5-20S 。
可以抑制测量波动。
5、自动抑制范围工程代号: 编写: 审核: 批准: 日期: 页 码2.2.5.3 Auto Suppression Range 工厂默认为1.00M ,可以根据实际情况设置范围是0-30M 。
一般设置为法兰下端面至喇叭天线的长度加20-30CM 。
2.2.5.2 Auto False Echo Suppression 虚假波抑制学习, 选择Learn ,等待变为On ,设置成功。
6、波形图3.1 Echo Profile ,观察波峰位置。
罗斯蒙特雷达液位计一、基本组态:(测量不准时可检查基本组态。
当测量值与实际值偏差时调整罐高。
)连接475,选择online setup选择Basic Setup1.设置罐体形状。
选择Geometry选择Tank type设置罐体形状Unknown(未知)Vertical Cyl(垂直圆筒) TANK type Horizontal Cyl(水平圆筒)(罐的类型) Spherical (球形)Cubical (立方形)根据实际情况选择合适的形状。
确认后返回上一菜单,选择2 Tank bottom type设置罐底类型,通常为Flat。
Unknown(未知)Flat(平的)TANK BOTTOM Done(圆的)(罐底类型) Cone(锥形的)Flat inclined(斜面)根据实际情况选择合适的形状。
确认后返回上一菜单,选择Tank height设置罐高,即空高,雷达法兰下表面至罐底距离。
在本例中空高为米。
2.设置工作环境。
确认后返回基本设置菜单,选择Environment,设置工作环境确认后,选择Process Condition进入根据实际情况选择工作环境,通常来说全部选择OFF,如果污水池有浮渣、泡沫造成波动很大,可设置Foam为ON。
Rapid Changes(快速变化的)Turbulent(剧烈起伏的)TANK ENVIRONMENT Foam (有泡沫的)(波动大时选择)(罐的工作环境) Solid(固体的)3.选择量程。
确认后返回基本设置菜单,选择Analog Out进入,设置4~20mA对应的量程。
第一项Primary variable选择Level,即输出液位。
第二项进入后设置量程。
二、查看回波online setup Echo Curve Echo Curve Echo Curve稍等即可查看波形。
雷达液位计检修操作规程一、测量原理液位(或料位)是由储罐顶部的天线发射的雷达信号测量的。
雷达信号被液体表面反射后,天线接收回波。
由于信号频率在改变,回波与信号发射瞬间相比,其频率稍有不同。
该频率差正比于至液体的距离,并且可精确地计算。
这方法称作调频连续波(FMCW)。
二、主要技术性能供电:24—240 VDC/AC ,0—60 Hz,10 W,15VA三、接线3.1 5600雷达接线3.2 REX雷达接线3.2.1 REX雷达变送器外壳内接线:本质安全侧——EEx i,端子块X12 用于下列本质安全连接:1 模拟输入1 + / HART2 模拟输入1 - / HART3 模拟输入2 +4 模拟输入2 –5 DAU/RDU40 信号6 DAU/RDU40 电源7 DAU/RDU40 接地8 T1(温度传感器)9 T2(温度传感器)…..15 T8(温度传感器)非本质安全侧——EEx e ,端子块X11 用于下列基本类型连接1 电源L,L1+2 电源N,L2-3 现场总线4 现场总线5 -8继电器40REX 可连接一台标准数据采集单元(DAU)或独立式远传显示单元(RDU 40)。
3.2.2REX雷达变送器外壳内电子单元各卡件功能:见图3.2.2模拟处理卡件:APC 用于模拟输入信号的滤波和多路复用传输。
通过使模拟电路集中在单独的卡件高的信噪比。
变送器接口卡件:变送器接口卡件本质安全辅助输入要求使用变送器接口卡件(TIC)。
TIC 包括:两个进线安全栅和两个回线安全栅,用于4-20 mA 电流回路本质安全辅助输入要求使用变送器接口卡件(TIC);一个进线安全栅,用于下位机数据采集单元或本机显示单元;信号/电源连接,用于可选的温度多路复用器卡件(TMC)。
温度多路复用器卡件:TMC 温度多路复用器卡件(TMC)用于连接多达 6 台温度传达感器。
可支持单点温度传感器和平均温度传感器。
继电器输出卡件:ROC 继电器输出卡件(ROC)可连接两台继电器。
罗斯蒙特PRO型雷达液位计操作维护规程西部管道新疆输油分公司2010年5月签字职务日期编制人:审核人:批准人:目录1范围 (1)2规范性引用文件 (1)3术语和定义 (1)4操作维护内容 (1)5风险提示 (18)6应急处置 (18)7附件 (18)1 范围本规程适应于西部管道所有罗斯蒙特PRO型雷达液位计。
2 规范性引用文件本规程根据技术规格书和设备技术资料,对罗斯蒙特PRO系列雷达液位计的安装环境、设备技术指标、操作和维护进行了说明。
3 术语和定义4 操作维护内容4.1 概述罗斯蒙特PRO系列雷达液位变送器是一种功能强大的雷达液位变送器,适用于过程中间储罐、物料储罐和其他类型储罐的非接触液位测量。
该变送器的设计可实现轻松安装和免维护运行。
它可以通过特殊设计的Radar Master(雷达主机)软件包进行组态、维护和测量数据显示功能,或采用HART技术,通过手持通讯器或微机对测量数据进行组态和监控。
对于独立系统或作为微机或控制系统的补充部分,可根据特殊的硬件组态采用一个或两个模拟输出对液位数据进行监控。
罗斯蒙特PRO雷达液位变送器可配备易于使用的罗斯蒙特2210显示板。
2210显示板所提供的功能与Radar Master(雷达主机)软件包的功能基本相同。
四个功能强大的软键可向您提供组态程序访问、维护功能和液位监控。
4.2 测量原理PRO系列雷达液位计通过从储罐顶部天线发射的雷达信号对储罐内产品的液位进行测量;变送器向产品表面发送频率连续变化的微波信号,在雷达信号被产品表面反射后,回波被天线接收。
由于信号频率不断变化,与此时发射的信号相比,回波的频率稍微有所不同,从而产生与产品表面距离成比例的低频信号。
变送器使用快速傅立叶变换(FFT)技术从而得到储罐内所有回波的频谱,从该频谱可求出表面液位,从而实现对储罐液位的的快速、可靠和精确测量。
基于频率连续变化的雷达扫描调频连续波图该种测量方法被称为FMCW(调频连续波)并应用于所有高性能雷达变送器。
WT-RII-DS2F 智能雷达液位计说明书西安沃泰科技有限公司地址:西安市高新六路52号A座5F目录一、工作原理 (2)二、功能特点 (2)三、适用范围 (3)四、性能指标 (3)五、技术指标 (3)六、安装 (3)七、系统操作说明 (5)7.1操作说明 (5)7.2参数说明 (5)附录一:显示菜单 (6)附录二:常见问题及排除方法 (7)附录三:出厂设备清单 (7)一、工作原理智能雷达液位计是我公司推出的新一代高性能物(液)位测量解决方案产品。
雷达液位计采样方式为非接触式,通过天线系统发射、接收能量很低的微波脉冲,雷达接收到微波脉冲并将其传输给处理电路,处理电路通过智能化的软件识别出正确的回波,距离被测物表面的距离D与脉冲的时间行程T成正比:D = C *T/2其中C为光速,因安装高度(雷达天线到0参考点的距离)E已知,则物(液)位L为:L=E-D二、功能特点智能雷达液位计的设计采用了新型的超低功耗的微控制器MSP430F149和智能化软件,使其具有非常突出的优点:●不受温度、压力等外界环境影响;●波束小,能量集中,抗干扰能力强,精确度高;●系统设计采用工业级标准芯片,稳定性高,工作温度范围宽;●128*64点阵图形液晶,可同时显示水位、流量、累计流量和系统时间;●RS485通讯接口,可实现数据的远距离传输;●软件设计智能化,有多种标准渠型可选,还可对非标准的水槽进行现场组态;●集成了温度补偿电路,可消除温度对测量数据的不良影响;●精度高、稳定性好;●低功耗;●主控制器和传感器采用分体式设计,并可根据现场环境更换不同量程的传感器;●结构精巧、安装便捷;●防潮、防尘、防绣蚀;●防雷击、防射频干扰;三、适用范围●水文测量与监控●城市及供水系统●循环水及污水处理系统●工业现场液位、流量的测量与控制四、性能指标测量介质一般液体渠道类型各种类型的标准测渠、非标准渠道渠道宽度大于50cm,与渠道形状和安装高度有关测量液位0~30米(精度+/-1cm)探头频率26G传感器可承受偶然的水浸压力达20psi输出信号RS-485工作电压12VDC功耗测量时为90mA,职守时1mA工作温度-25~70℃贮存温度-40~125℃五、技术指标精度±0.25%电源影响小于输出量程的0.01%/V负载影响可忽略不计温度影响±1.5%FS (补偿温度: 0~70℃)稳定性±0.25%FS/1年防护等级IP68六、安装智能雷达液位计主要由主机和传感器两部分组成。