第4章 根轨迹法
- 格式:doc
- 大小:1.58 MB
- 文档页数:6

第四章:根轨迹法第四章根轨迹法本章⽬录4.1 根轨迹的⼀般概念4.2 绘制根轨迹的数学依据及其性质4.3 绘制根轨迹的⼀般规则4.4 *绘制根轨迹的MATLAB函数介绍4.5 例题4.6 参数根轨迹和多回路系统的根轨迹4.7 正反馈回路和⾮最⼩相位系统根轨迹——零度根轨迹⼩结本章简介从前章得知闭环极点在根平⾯上的分布,反映着系统的固有性能。
故为了获得较好性能,就希望极点在根平⾯上有较好的分布。
亦即,为了研究系统的动态性能,就可以通过闭环极点在根平⾯上的分布来进⾏。
闭环极点是系统特征⽅程的根sb。
若其特征⽅程中,各系数变化,则⽆疑,其根sb也在变化。
各系数的变化往往相应着系统的许多实际参数的变化⽽形成。
在根迹中,⼀般总是以增益 (当然也可其它参数,如时间常数 )的变化⽽导致各系数的变化,即sb的变化。
如果连续变化,则sb也连续变化。
相应于由0连续变化到∞时, sb在根平⾯上的连续变化⽽形成的轨迹,即闭环系统特征根的根轨迹--若⼲条曲线。
这样,相应于各个值下的闭环极点在根平⾯上的分布就⼀⽬了然了。
这对系统的分析、设计带来了极⼤的⽅便.。
所谓根轨迹法,就是⽤图解的⽅法确定出闭环特征根的⼀种⽅法。
先在复数平⾯上画出系统某⼀参数的全部数值下的特征⽅程的所有根,即根轨迹。
然后⽤图解的⽅法确定出该参数某⼀特定数值时的闭环特征根。
从⽽分析出系统所具有的性能。
或反之,在根迹上先确定出符合系统性能要求的闭环特征根。
从⽽⽤图解的⽅法求出相应的系统应具有的参数值。
相对时域法,很直观,且避免了求解系统⾼阶特征⽅程的困难。
现在计算机科学有了飞速发展,特别是MATLAB语⾔及其相应⼯具箱,有强⼤的数值计算和图形绘制功能。
所以利⽤MATLAB语⾔相关函数绘制系统根迹及求根等均是轻⽽易举的事。
这就给根迹法的应⽤开辟了更好的前景。
本章在介绍传统的根轨迹法及其⽰例的同时,有机结合介绍MATLAB语⾔相关的根轨迹函数及相应⽰例的解题程序。
第4章 根轨迹法在时域分析中已经看到,控制系统的性能取决于系统的闭环传递函数,因此,可以根据系统闭环传递函数的零、极点研究控制系统性能。
但对于高阶系统,采用解析法求取系统的闭环特征方程根(闭环极点)通常是比较困难的,且当系统某一参数(如开环增益)发生变化时,又需要重新计算,这就给系统分析带来很大的不便。
1948年,伊万思根据反馈系统中开、闭环传递函数间的内在联系,提出了求解闭环特征方程根的比较简易的图解方法,这种方法称为根轨迹法。
因为根轨迹法直观形象,所以在控制工程中获得了广泛应用。
本章介绍根轨迹的概念,绘制根轨迹的法则,广义根轨迹的绘制以及应用根轨迹分析控制系统性能等方面的内容。
4.1 根轨迹法的基本概念本节主要介绍根轨迹的基本概念,根轨迹与系统性能之间的关系,并从闭环零、极点与开环零、极点之间的关系推导出根轨迹方程,并由此给出根轨迹的相角条件和幅值条件。
4.1.1 根轨迹的基本概念根轨迹是当开环系统某一参数(如根轨迹增益*K )从零变化到无穷时,闭环特征方程的根在s 平面上移动的轨迹。
根轨迹增益*K 是首1形式开环传递函数对应的系数。
在介绍图解法之前,先用直接求根的方法来说明根轨迹的含义。
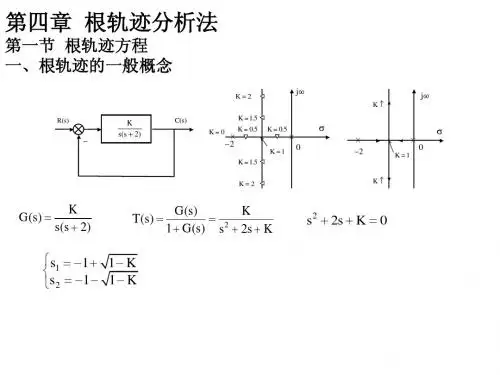
控制系统如图4-1所示。
其开环传递函数为)2()15.0()(*+=+=s s K s s K s G根轨迹增益K K 2*=。
闭环传递函数为*2*2)()()(K s s K s R s C s ++==Φ 闭环特征方程为02*2=++K s s特征根为:*111K -+-=λ, *211K ---=λ当系统参数*K (或K )从零变化到无穷大时,闭环极点的变化情况见表4-1。
表4-1 **KK1λ2λ0 0 0 -2 0.5 0.25 -0.3 -1.7 1 0.5 -1 -1 2 1 -1+j -1-j 5 2.5 -1+j2 -1-j2 M M M M ∞∞-1+j ∞-1-j ∞利用计算结果在s 平面上描点并用平滑曲线将其连接,便得到K (或*K )从零变化到无穷大时闭环极点在s 平面上移动的轨迹,即根轨迹,如图4-2所示。
图中,根轨迹用粗实线表示,箭头表示K (或*K )增大时两条根轨迹移动的方向。
根轨迹图直观地表示了参数K (或*K )变化时,闭环极点变化的情况,全面地描述了参数K 对闭环极点分布的影响。
4.1.2 根轨迹与系统性能依据根轨迹图(见图4-2),就能分析系统性能随参数(如*K )变化的规律。
1.稳定性开环增益从零变到无穷大时,图4-2所示的根轨迹全部落在左半s 平面,因此,当K >0时,图4-1所示系统是稳定的;如果系统根轨迹越过虚轴进入右半s 平面,则在相应K 值下系统是不稳定的;根轨迹与虚轴交点处的K 值,就是临界开环增益。
图4-2 系统根轨迹图2.稳态性能由图4-2可见,开环系统在坐标原点有一个极点,系统属于Ⅰ型系统,因而根轨迹上的K 值就等于静态误差系数v K 。
当)(1)(t t r =时, =ss e 0;当t t r =)(时, *21K K e ss ==3.动态性能由图4-2可见,当5.00<<K 时,闭环特征根为实根,系统呈现过阻尼状态,阶跃响应为单调上升过程;当5.0=K 时,闭环特征根为二重实根,系统呈现临界阻尼状态,阶跃响应仍为单调过程,但响应速度较5.00<<K 时为快;当5.0>K 时,闭环特征根为一对共轭复根,系统呈现欠阻尼状态,阶跃响应为振荡衰减过程,且随K 增加,阻尼比减小,超调量增大,但s t 基本不变。
上述分析表明,根轨迹与系统性能之间有着密切的联系,利用根轨迹可以分析当系统参数(K )增大时系统动态性能的变化趋势。
用解析的方法逐点描画、绘制系统的根轨迹是很麻烦的。
我们希望有简便的图解方法,可以根据已知的开环零、极点迅速地绘出闭环系统的根轨迹。
为此,需要研究闭环零、极点与开环零、极点之间的关系。
4.1.3 闭环零、极点与开环零、极点之间的关系控制系统的一般结构如图4-3所示,相应开环传递函数为)()(s H s G 。
假设∏∏==--=gi ifi iG p s z s Ks G 11*)()()( (4-1)*11()()()mHjj f njj g Ks z H s s p =+=+-=-∏∏ (4-2)因此*1111()()()()()()f miji j f gniji j g Ks z s z G s H s s p s p ==+==+--=--∏∏∏∏ (4-3)式中,***H G K K K =为系统根轨迹增益。
对于m 个零点、n 个极点的开环系统,其开环传递函数可表示为)()()()(11*jnj imi ps z s Ks H s G --=∏∏== (4-4)式中,i z 表示开环零点,j p 表示开环极点。
系统闭环传递函数为*11*11()()()()1()()()()f nGiji j g nm jij i Ks z s p G s s G s H s s p K s z ==+==--Φ==+-+-∏∏∏∏ (4-5)由式(4-5)可见:⑴ 闭环零点由前向通路传递函数)(s G 的零点和反馈通路传递函数)(s H 的极点组成。
对于单位反馈系统1)(=s H ,闭环零点就是开环零点。
闭环零点不随*K 变化,不必专门讨论之。
⑵ 闭环极点与开环零点、开环极点以及根轨迹增益*K 均有关。
闭环极点随*K 而变化,所以研究闭环极点随*K 的变化规律是必要的。
根轨迹法的任务在于,由已知的开环零、极点的分布及根轨迹增益,通过图解法找出闭环极点。
一旦闭环极点确定后,再补上闭环零点,系统性能便可以确定。
4.1.4 根轨迹方程闭环控制系统一般可用图4-3所示的结构图来描述。
开环传递函数可表示为∏∏==--=nj jmi ips z s Ks H s G 11*)()()()(系统的闭环传递函数为)()(1)()(s H s G s G s +=Φ (4-6)系统的闭环特征方程为0)()(1=+s H s G (4-7) 即=)()(s H s G 1)()(11*-=--∏∏==nj jmi ips z s K(4-8)显然,在s 平面上凡是满足式(4-8)的点,都是根轨迹上的点。
式(4-8)称为根轨迹方程。
式(4-8)可以用幅值条件和相角条件来表示。
幅值条件: =)()(s H s G 1)()(11*=--∏∏==nj jmi ips z s K(4-9) 相角条件:∠)()(s H s G ==-∠--∠∑∑==nj jmi ips z s 11)()(∑∑==+=-nj jmi i k 11)12(πθϕ Λ,2,1,0±±=k (4-10)式中,∑iϕ、∑jθ分别代表所有开环零点、极点到根轨迹上某一点的向量相角之和。
比较式(4-9)和(4-10)可以看出,幅值条件(4-9)与根轨迹增益*K 有关,而相角条件(4-10)却与*K 无关。
所以,s 平面上的某个点,只要满足相角条件,则该点必在根轨迹上。
至于该点所对应的*K 值,可由幅值条件得出。
这意味着:在s 平面上满足相角条件的点,必定也同时满足幅值条件。
因此,相角条件是确定根轨迹s 平面上一点是否在根轨迹上的充分必要条件。
例4-1 设开环传递函数为))(()()()(321*p s p s s z s K s H s G ---=其零、极点分布如图4-4所示,判断s 平面上某点是否是根轨迹上的点。
解 在s 平面上任取一点1s ,画出所有开环零、极点到点1s 的向量,若在该点处相角条件=++-=-∑∑==nj jm i i 132111)(θθθϕθϕπ)12(+k成立,则1s 为根轨迹上的一个点。
该点对应的根轨迹增益*K 可根据幅值条件计算如下:EBCDz sp sK m i i nj j =--=∏∏==1111*)()( 式中B ,C ,D 分别表示各开环极点到1s 点的向量幅值,E 表示开环零点到1s 点的向量幅值。
应用相角条件,可以重复上述过程找到s 平面上所有的闭环极点。
但这种方法并不实用。
实际绘制根轨迹是应用以根轨迹方程为基础建立起来的相应法则进行的。