第四章 根轨迹法 习题
- 格式:doc
- 大小:110.50 KB
- 文档页数:4

4-1 绘制具有下列开环传递函数的负反馈系统的根轨迹1、()()()()54*++=s s s K s H s G解:(1)3个开环极点为:p 1=0,p 2=-4,p 3=-5。
(2)实轴上的根轨迹(-4,0),(-∞,-5)(3)303054011-=----=--=∑∑==mn zp n i mj jiσ()() ,,331212ππππϕ±±=+=-+=k mn k a(4) 分离点:1110d 45d d ++=++ d=-1.47, d=-4.53(舍) (5)与虚轴的交点:在交点处,s=j ω,同时也是闭环系统的特征根,必然符合闭环特征方程,于是有:()020********=++--=+++*=*K j j K s s sj s ωωωω整理得: 0203=-ωω;092=-*ωK 解得01=ω;203,2±=ω;18092==*ωK 最后,根据以上数据精确地画出根轨迹。
2、()()()()11.02*++=s s s K s H s G 解:(1)开环极点有3个,分别为:p 1=p 2=-0,p 3=-1,开环零点为z=-0.1 (2)实轴上的根轨迹为:[-1 -0.1] (3) 渐进线有两条,45.0131.010011-=-+--=--=∑∑==mn zp n i mj jiσ()() ,23,2131212ππππϕ±±=-+=-+=k mn k a (4) 分离点:1111d 10.1d d d ++=++ d=0, d=--0.4(舍), d=0.25(舍)分离角:()() ,23,221212ππππϕ±±=+=+=k lk d 最后,精确地画出根轨迹。
4-3 已知系统的开环传递函数为()()()2*1+=s s K s H s G ① 绘制系统的根轨迹图;② 确定实轴上的分离点及K *的值; ③ 确定使系统稳定的K *值范围。
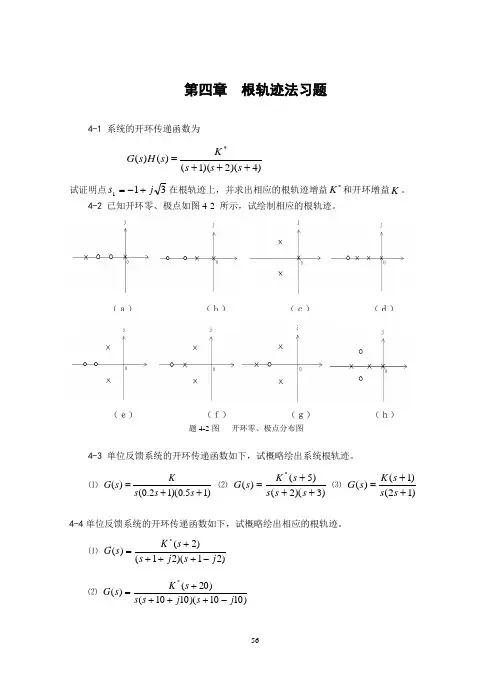
第四章 根轨迹法习题4-1 系统的开环传递函数为 )4)(2)(1()()(*+++=s s s Ks H s G试证明点311j s +-=在根轨迹上,并求出相应的根轨迹增益*K 和开环增益K 。
4-2 已知开环零、极点如图4-2 所示,试绘制相应的根轨迹。
4-3 单位反馈系统的开环传递函数如下,试概略绘出系统根轨迹。
⑴ )15.0)(12.0()(++=s s s Ks G ⑵ )3)(2()5()(*+++=s s s s K s G ⑶ )12()1()(++=s s s K s G4-4单位反馈系统的开环传递函数如下,试概略绘出相应的根轨迹。
⑴ )21)(21()2()(*j s j s s K s G -++++=⑵ )1010)(1010()20()(*j s j s s s K s G -++++=4-5 系统的开环传递函数如下,试概略绘出相应的根轨迹。
⑴ )208()()(2++=*s s s Ks H s G ⑵ )5)(2)(1()()(+++=*s s s s Ks H s G⑶ )22)(3()2()()(2++++=*s s s s s K s H s G ⑷ )164)(1()1()()(2++-+=*s s s s s K s H s G4-6 已知单位反馈系统的开环传递函数)(s G ,要求: (1)确定)20)(10()()(2+++=*s s s z s K s G 产生纯虚根为1j ±的z 值和*K 值;(2)概略绘出)23)(23)(5.3)(1()(j s j s s s s Ks G -+++++=*的闭环根轨迹图(要求确定根轨迹的渐近线、分离点、与虚轴交点和起始角)。
4-7 已知控制系统的开环传递函数为 22)94(2)()(+++=*s s s K s H s G )(试概略绘制系统根轨迹。
4-8 已知系统的开环传递函数为)93()(2++=*s s s Ks G试用根轨迹法确定使闭环系统稳定的K 值范围。


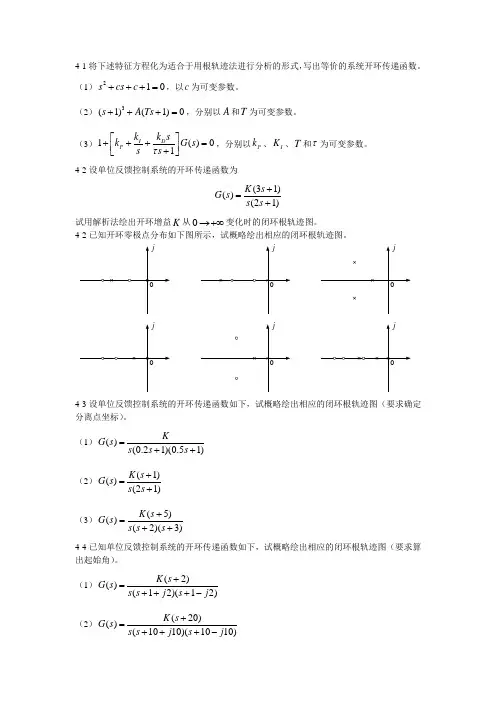
4-1将下述特征方程化为适合于用根轨迹法进行分析的形式,写出等价的系统开环传递函数。
(1)210s cs c +++=,以c 为可变参数。
(2)3(1)(1)0s A Ts +++=,分别以A 和T 为可变参数。
(3)1()01I D P k k s k G s ss τ⎡⎤+++=⎢⎥+⎣⎦,分别以P k 、I K 、T 和τ为可变参数。
4-2设单位反馈控制系统的开环传递函数为(31)()(21)K s G s s s +=+试用解析法绘出开环增益K 从0→+∞变化时的闭环根轨迹图。
4-2已知开环零极点分布如下图所示,试概略绘出相应的闭环根轨迹图。
4-3设单位反馈控制系统的开环传递函数如下,试概略绘出相应的闭环根轨迹图(要求确定分离点坐标)。
(1)()(0.21)(0.51)KG s s s s =++(2)(1)()(21)K s G s s s +=+(3)(5)()(2)(3)K s G s s s s +=++4-4已知单位反馈控制系统的开环传递函数如下,试概略绘出相应的闭环根轨迹图(要求算出起始角)。
(1)(2)()(12)(12)K s G s s s j s j +=+++-(2)(20)()(1010)(1010)K s G s s s j s j +=+++-4-5设单位反馈控制系统开环传递函数如为*2()()(10)(20)K s z G s s s s +=++试确定闭环产生纯虚根1j ±的z 值和*K 值。
4-6已知系统的开环传递函数为*22(2)()()(49)K s G s H s s s +=++试概略绘出闭环根轨迹图。
4-7设反馈控制系统中*2()(2)(5)KG s s s s =++(1)设()1H s =,概略绘出系统根轨迹图,判断闭环系统的稳定性(2)设()12H s s =+,试判断()H s 改变后的系统稳定性,研究由于()H s 改变所产生的影响。
第四章 根轨迹法习题及答案4-1 系统的开环传递函数为)4s )(2s )(1s (K )s (H )s (G *+++=试证明3j 1s 1+-=在根轨迹上,并求出相应的根轨迹增益*K 和开环增益K 。
解 若点1s 在根轨迹上,则点1s 应满足相角条件π)12()()(+±=∠k s H s G ,如图所示。
对于31j s +-=,由相角条件=∠)s (H )s (G 11-++-∠-)13j 1(0=++-∠-++-∠)43j 1()23j 1(ππππ-=---632满足相角条件,因此311j s +-=在根轨迹上。
将1s 代入幅值条件:143j 123j 113j 1K s H )s (G *11=++-⋅++-⋅++-=)(解出 : 12K *= , 238K K *==4-2 已知单位反馈系统的开环传递函数如下,试求参数b 从零变化到无穷大时的根轨迹方程,并写出2b =时系统的闭环传递函数。
(1))b s )(4s (02)s (G ++=(2))b s )(2s (s )b 2s (01)s (G +++=解 (1) )4j 2s )(4j 2s ()4s (b 20s 4s )4s (b )s (G 2-++++=+++=' 28s 6s 20)s (G 1)s (G )s (2++=+=Φ(2) )10s 2s (s )20s 2s (b )s (G 22++++='=)3j 1s )(3j 1s (s )19j 1s )(19j 1s (b -+++-+++ 40s 14s 4s )4s (10)s (G 1)s (G )s (23++++=+=Φ 4-3 已知单位反馈系统的开环传递函数)b s )(4s (s2)s (G ++=,试绘制参数b 从零变化到无穷大时的根轨迹,并写出s=-2这一点对应的闭环传递函数。
解 )6s (s )4s (b )s (G ++='根轨迹如图。
第四章 根轨迹法
4-1试粗略画出对应反馈控制系统具有以下前向和反馈传递函数的根轨迹图: ()()()
()s s H s s s K s G 6.01,01.01.02
+=++=
4-2 试粗略地画出反馈系统函数 ()()()()
2
411+-+=
s s s K
s G 的根轨迹。
4-3 对应负反馈控制系统,其前向和反馈传递函数为 ()()()
()1,42)
1(2
=+++=
s H s s s s K s G 试粗略地画出系统的根轨迹。
4-4 对应正反馈重做习题4-3,试问从你的结果中得出什么结论?
4-5 试画出具有以下前向和反馈传递函数的,正反馈系统根轨迹的粗略图。
()()()()1,412
2=++=
s H s s K
s G
4-6 试确定反馈系统开环传递函数为 ()()()()()
5
284)
2(2
+++++=
s s s s s s K s H s G 对应-∞<K<∞的根轨迹。
指明所有根轨迹上的相应特征。
4-7 设一负反馈系统,其开环传递函数 ()()()()()
90020040)4(2
++++=
s s s s s K s H s G a) 画出根轨迹并表明根轨迹上全部特征值。
b) 增益值在一个什么样的范围内,系统才是稳定的? c) 画出系统的伯德图,并使其稳定性和不稳定性区域,与根轨迹图连系起来说明。
4-8 对应负反馈情况,重做习题4-7.
4-9 对应如下的负反馈控制系统,粗略地作出根轨迹,并确定系统稳定下K 的范围。
()()()
()1,41)
6(=+++=
s H s s s s K s G
4-10 对应习题4-10图所示系统,根据以下条件,试确定导致系统稳定的正实数增益K 的范围:
a) 具有负反馈的系统。
b) 具有正反馈的系统。
习题4-10图
4-11 已知反馈系统的开环传递函数
*
()()(1)(2)
K G s H s s s s =
++ 试绘制系统的根轨迹图,详细列写根轨迹的计算过程,其中包括零点、极点、渐近线及与实轴交点,根轨迹分离点及与虚轴的交点、渐近线与实轴夹角。
求出根轨迹及与虚轴相交时的K *
及相应的开环增益K 。
4-12 已知负反馈系统的闭环特征方程
K 1+(s+14)(s 2
+2s+2)=0
(1) 绘制系的根轨迹图(0<K1<∞);
(2) 确定使复数闭环主导极点的阻尼系数ζ=0.5的K 1值。
4-13 已知某单位反馈系统的开环传递函数
*2
()(1)
K G s s s =+
试绘制系统的根轨迹图,说明其稳定性。
如果负实轴上增加一个零点-a(0≤a ≤1),对系统的稳定性有何影响,仍以根轨迹图来说明。
4-14 已知某单位反馈系统的闭环根轨迹图如习题4-14图所示
(1)确定使系统稳定的根轨迹增益K *
的范围; (2)写出系统临界阻尼时的闭环传递函数。
习题4-14图
4-15已知某单位反馈系统的开环传递函数
*(1)()(2)(3)
K s G s s s s +=
++
试绘制闭环系统的概略根轨迹。
4-16已知反馈系统的开环传递函数
*
2
()()(4)(420)
K G s H s s s s s =+++ 试绘制闭环系统的概略根轨迹。
4-17如果某单位反馈系统的开环传递函数为
*()1
K G s s =
+
试用解析法绘制K *
从零到无穷时的闭环系统的根轨迹图,并判断下列点是否在根轨迹上:
(-2+j0),(0+j1),(-3+j2)
4-18 设某单位反馈系统的开环传递函数为
*
()(0.011)(0.021)
K G s s s s =
++ (1) 绘制闭环系统的根轨迹;
(2)确定使系统临界稳定的开环增益K C ;
(3)确定使系统临界阻尼比相应的开环增益K C 。
4-19非最小相位系统的特征方程为
(s+1)(s+3)(s-1)(s-3)+K *(S 2
+4)=0
试绘制该系统的根轨迹图。
4-20已知反馈系统的开环传递函数
(0.251)()()(0.51)
K s G s H s s s +=
+ 试用根轨迹法确定系统无超调响应时的开环增益K 。
4-21 如习题4-21图所示控制系统: (1)绘制该系统的根轨迹图;
(2)求系统输出c(t)无振荡分量时的闭环传递函数。
习题4-21图
4-22 设负反馈系统的开环传递函数为
*
()()(3)(2)
K G s H s s s =
++ 试绘制闭环系统的概略根轨迹。
若系统: (1) 增加一个z=-5的零点; (2) 增加一个z=-2.5的零点; (3) 增加一个z=-0.5的零点。
试绘制增加零点后系统的根轨迹,并分析增加零点后根轨迹的变化规律和对系统性能的影响。
4-23 设负反馈系统的开环传递函数为
2
() , ()(1)
K
G s H s s a s s =
=++ (1) 利用MATLAB 有关函数作出0≤a<1时系统的根轨迹和单位阶跃响应曲线; (2) 讨论a 值变化对系统动态性能及稳定性的影响(0≤a<1)。