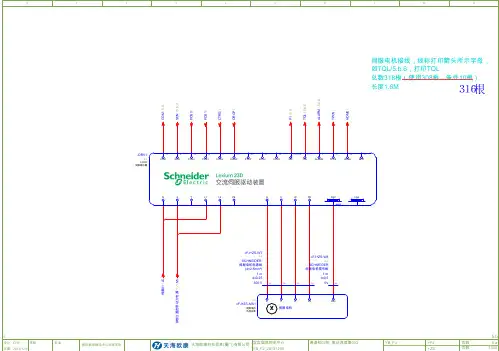
伺服驱动器XA接口接线图 V1.0.20110817
- 格式:pdf
- 大小:283.59 KB
- 文档页数:1
伺服驱动器接线原理图伺服驱动器是一种能够控制伺服电机运动的装置,它通过接线连接来实现对电机的控制。
在进行伺服驱动器接线时,需要按照一定的原理图进行连接,以确保电路的正常运行和电机的正常工作。
下面将详细介绍伺服驱动器接线的原理图及其相关知识。
首先,我们需要了解伺服驱动器的基本结构。
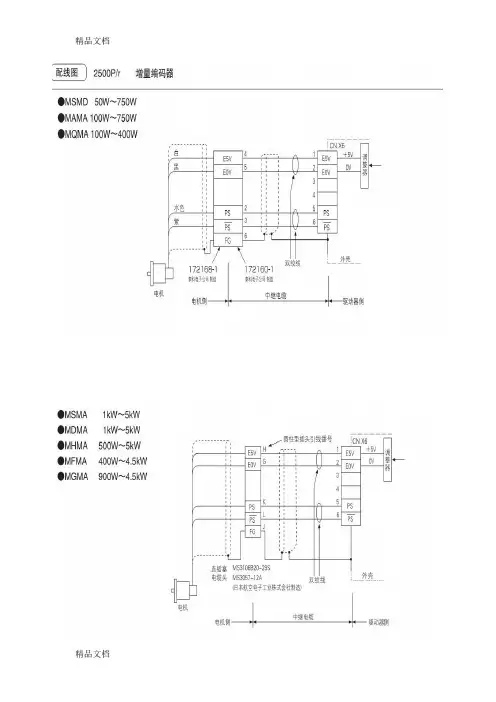
伺服驱动器通常由电源模块、控制模块、功率放大模块、编码器反馈模块等部分组成。
在接线时,需要将这些模块按照原理图连接在一起,以实现对电机的控制和驱动。
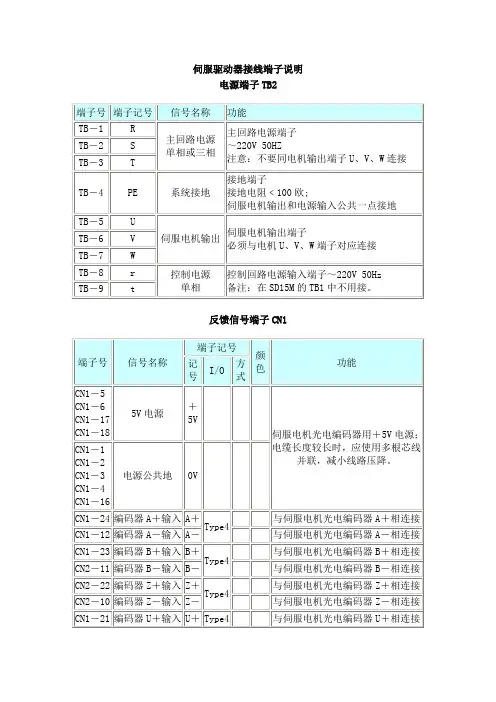
在接线原理图中,通常会标明各个接线端子的功能和连接方式。
比如,电源模块的接线端子通常会标明输入电压范围、接地端子等信息;控制模块的接线端子通常会标明信号输入端子、报警端子等信息;功率放大模块的接线端子通常会标明电机输出端子、电源输入端子等信息;编码器反馈模块的接线端子通常会标明编码器信号输入端子、电源输入端子等信息。
通过这些标识,我们可以清晰地了解每个接线端子的作用和连接方式,从而正确进行接线。
在实际接线时,需要根据原理图逐一连接各个端子。
首先,我们需要根据电源模块的接线要求接入电源,并连接好接地端子;然后,根据控制模块的接线要求接入控制信号,并连接好报警端子;接着,根据功率放大模块的接线要求连接好电机输出端子和电源输入端子;最后,根据编码器反馈模块的接线要求接入编码器信号并连接好电源输入端子。
通过按照原理图逐一连接,我们可以确保接线的正确性和稳定性。
在进行接线时,还需要注意一些细节问题。
比如,接线时要注意接线端子的清洁和紧固,以确保良好的接触和连接;接线时要注意线路的布局和走向,以避免出现交叉和混乱;接线时要注意绝缘和防护,以确保安全可靠。
通过注意这些细节问题,可以有效地避免接线过程中出现的问题和故障。
总的来说,伺服驱动器接线原理图是进行接线连接的重要参考依据,通过按照原理图进行连接,可以确保接线的正确性和稳定性。
在接线时,需要严格按照原理图的要求进行连接,并注意一些细节问题,以确保电路的正常运行和电机的正常工作。
伺服驱动器接线原理图伺服驱动器是现代工业自动化控制系统中常用的一种电机控制装置,它能够实现对电机的精确控制,广泛应用于机械加工、自动化设备、机器人等领域。
在伺服驱动器的安装和调试过程中,接线是一个非常重要的环节,正确的接线能够保证设备的正常运行和稳定性。
因此,本文将介绍伺服驱动器接线原理图,帮助大家更好地理解和掌握伺服驱动器的接线方法。
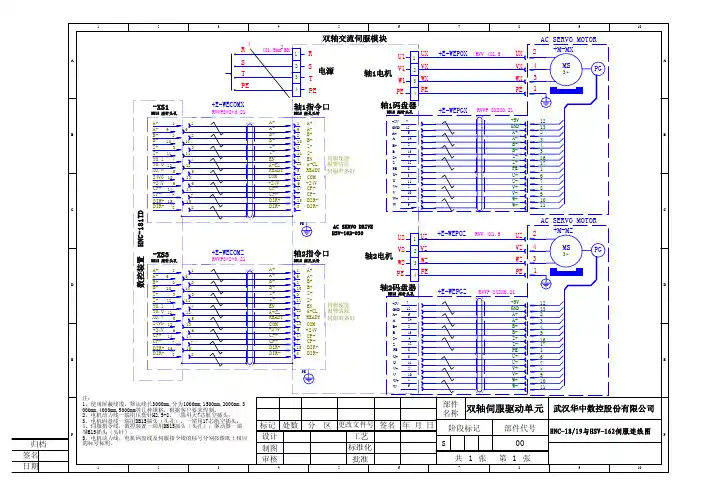
首先,我们来看一下伺服驱动器接线原理图的基本构成。
伺服驱动器通常由电源模块、控制模块、电机模块和接口模块等部分组成。
在接线时,我们需要将这些模块按照一定的原理图进行连接,确保各个部分之间的信号和电气连接正确无误。
接下来,我们将详细介绍伺服驱动器接线原理图的具体内容。
首先是电源模块的接线,电源模块通常包括主电源输入、控制电源输入和电机电源输出等部分。
在接线时,我们需要将主电源输入与电源模块的主电源端子相连接,控制电源输入与控制模块的电源端子相连接,电机电源输出与电机模块的电源端子相连接,确保各个部分的电源供应正常稳定。
其次是控制模块的接线,控制模块通常包括编码器输入、位置命令输入、速度命令输入和报警输出等部分。
在接线时,我们需要将编码器输入与编码器的信号端子相连接,位置命令输入与控制系统的位置命令端子相连接,速度命令输入与控制系统的速度命令端子相连接,报警输出与报警系统的输入端子相连接,确保控制模块能够正常接收和发送各种信号。
接着是电机模块的接线,电机模块通常包括电机输出、编码器反馈和制动器控制等部分。
在接线时,我们需要将电机输出与电机的三相电源相连接,编码器反馈与控制模块的编码器输入端子相连接,制动器控制与制动器的控制端子相连接,确保电机模块能够正常输出电力并接收编码器的反馈信号。
最后是接口模块的接线,接口模块通常包括通信接口、IO接口和编程接口等部分。
在接线时,我们需要将通信接口与控制系统的通信端子相连接,IO接口与外部设备的输入输出端子相连接,编程接口与编程设备的接口相连接,确保接口模块能够正常与外部设备进行通信和数据交换。
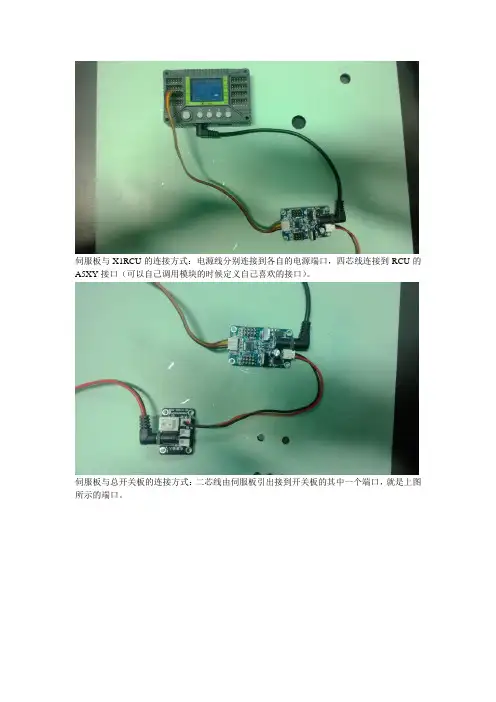
A5XY接口(可以自己调用模块的时候定义自己喜欢的接口)。
所示的端口。
最后电池接到总开关上面,作为总控制。
伺服板上面有8排接伺服的插针(都含有编号),用于同时连接8个伺服。
注意:伺服接法,根据调试文档的伺服编号,对应接上伺服板如下编号。
1号伺服接到伺服板编号1的排针上
2号伺服接到伺服板编号5的排针上
3号伺服接到伺服板编号2的排针上
4号伺服接到伺服板编号6的排针上
5号伺服接到伺服板编号3的排针上
新增模块,加了伺服调速板。
需要应用此模块。
SetServo_OneCH
图标:
说明:控制伺服角度
参数:3个
Which:选择控制接口。
Channel :选择伺服编号。
angle :设定伺服角度。
time :控制伺服速度,例如,40,就是用40时间走到所设定的角度,数值越大,伺服速度越慢,最大不超过5000。
注意:由于RCU断电之后,不能直接给信号给伺服板让伺服失电,会导致调试的时候很不方便,所以需要用总开关关掉,才能使伺服失电。
这样是需要加上总开关的原因。
前循迹卡接:A2XY
后循迹卡接:A1XY。