测边网.测角网.导线网典型计算
- 格式:doc
- 大小:1.13 MB
- 文档页数:25
控制网平差处理软件系统使用说明本系统与观测数据预处理软件系统是控制网处理系统的两个子系统,在运算本系统之前,一般先要运算预处理系统,预处理是为本系统提供输入数据文件。
系统是用Visual Basic语言开发的应用程序,在WINDOWS环境下运行,适用于各类工程平面控制网及测图平面控制网的平差计算和精度估算。
由于高程计算与斜距处理有关,高程网的平差处理编制在预处理系统内。
本系统是由DOS系统下运算的“平面控制网数据处理软件系统”移植过来的(原系统是1997年获国家科技进步三等奖成果[高精度大地测量监测自动化系统研究]的主要内容),在移植过程中继承了原系统的所有优点,增加了部分功能并改用图形用户界面来完成各种操作。
1、系统功能⑴适用于任何类型平面控制网的平差计算,例如测角网、测边网、边角网、导线网及各种混合网等。
⑵、除了作经典平差的运算外,还可以作自由网平差或拟稳自由网平差。
⑶、对水平方向分组观测数据,上机前可不必作测站平差,即不必将测站平差和平面控制网的平差分开进行。
测站点可以具有任意组方向观测值,方向及测距边可以具有多种等级的不同观测精度。
方向组之间可以有任意个公共方向联系,也可以相互独立。
对不同精度的所有观测方向及测距边按不等权进行整体平差。
⑷、起始边或测距边长度可以是参考椭球面上的长度或者是归算到指定平面上的长度。
根据需要可以计算距离改化、方向改化、方向观测值的测站归心改正和照准点归心改正。
⑸、组成全部三角形并计算其闭合差,当三角形各方向的观测精度相同时,限差采用精度数据文件(FPW.DAT)输入值;各方向的观测精度不同时,按各方向的输入精度计算其限差。
闭合差超限在打印表上用“*.*“符号表示,并统计超限个数。
⑹、自动组成测角及测边的全部极条件,并计算其自由项及限值,当组成极条件的方向或测边不是一种精度时,则按各观测方向或测距边的不同输入精度计算其限值,超限的用“*.*“符号表示,并统计其超限个数。

§3-4 三角网条件平差计算2学时三角网测量的目的,是通过观测三角形的各角度或边长,计算三角网中各未知点的坐标、边的长度及方位角等。
三角网按条件平差计算时,首要的问题是列出条件方程。
因此了解三角网的构成,总结其条件方程的种类及各种条件方程的组成规律是十分重要的。
三角网的种类比较多,网的布设形式也比较复杂。
根据观测内容的不同,有测角网、测边网、边角同测网等;根据网中起始数据的多少,有自由三角网和非自由三角网。
自由三角网是指仅具有必要起算数据的三角网,网中没有多余的已知数据。
如果测角三角网中,只有两个已知点(或者已知一个已知点的坐标、一条已知边的长度和一个已知的方位角),根据数学理论,以这两个已知点为起算数据,再结合必要的角度测量值,就能够解算出网中所有未知点的坐标。
如果三角网中除了必要的起算数据外还有其它的已知数据,或者说已知数据有冗余,就会增加对网形的约束,从而增强其可靠性,这种三角网称之为非自由三角网。
无论多么复杂的三角网,都是由单三角形、大地四边形和中点多边形组合而成的。
在本节,我们先讨论三角网条件平差中条件方程个数的确定问题,然后主要讨论测角三角网的条件方程的形式问题。
一、网中条件方程的个数三角网平差的目的,是要确定三角点在平面坐标系中的坐标最或然值。
如图3-9所示,根据前面学到的测量基础知识,我们知道,必须事先知道三角网中的四个数据,如两个三角点的4个坐标值,或者一个三角点的2个坐标值、一条边的长度和一个方位角,这4个已知数据我们称之为三角网的必要起算数据。
有了必要起算数据,就可以确定三角网在平面坐标系中的位置、网的大小及其方位,就可以计算三角网中未知点的坐标。
要对三角网进行平差计算,还必须先知道网中的总观测数n、判定必要观测数t,从而确定了多余观测数:r = n - t由条件平差原理知,多余观测数与条件方程数是相等的,有了多余观测数,也就确定出了条件方程的个数。
因此,问题的关键是判定必要观测数t。
水工建筑测量工(题库版)1、单选测量上采用的高斯平面直角坐标系是以每个投影带内的()的投影为x轴,以赤道的投影为y轴构成的。
A、子午线;B、中央子午线;C、任意中央子午线;D、参考椭球面。
答(江南博哥)案:B2、判断题角度误差的大小并不依赖角度的大小而变化。
正确答案:对3、单选观测了两个角度,其结果为∠A=146°50′±15″,∠B=25°41′±15″。
则这两个角度的观测精度是()。
A、相等;B、∠A比∠B高;C、∠B比∠A高;D、为零。
正确答案:A4、判断题全圆方向法是把两个以上的方向合为一组,从初始方向开始,依次进行水平方向观测,最后再次照准初始方向的观测方法。
正确答案:对5、判断题竖直角观测中的指标差属于系统误差。
正确答案:对6、单选测边网也应重视图形结构。
三角形各内角宜在30°~100°之间,当图形欠佳时,要加测()或采取其它措施加以改善。
A、对角线边长;B、角度;C、方位;D、测边数。
正确答案:A7、判断题三角锁由一系列相连的三角形构成链形的测量控制网。
正确答案:对8、单选水下地形测量观测其水面高程必须用视距测高时,应作正倒镜观测;垂直角不宜大于5°,其视距长度不应大于()米。
A、250米;B、300米;C、350米;D、400米。
正确答案:A9、单选测量工作的误差理论至关重要,不注重这方面的研究就难以保证()。
A、闭合差;B、测量精度;C、改正数;D、观测值。
正确答案:B10、单选在三角测量中,根据外业观测元素(角度和边长)的不同可分为测角网、测边网、()三种网形。
A、导线网;B、边角网;C、线形三角锁网;D、线形三角网。
正确答案:B11、判断题地球曲率与折光差改正在三角高程测量中,为消除或减弱测线受地球曲率与受大气折射两项误差影响而作的改正,简称两差改正。
正确答案:对12、单选布设高程控制网时,首级网应布成环形网,加密时宜布设成结点网或()。
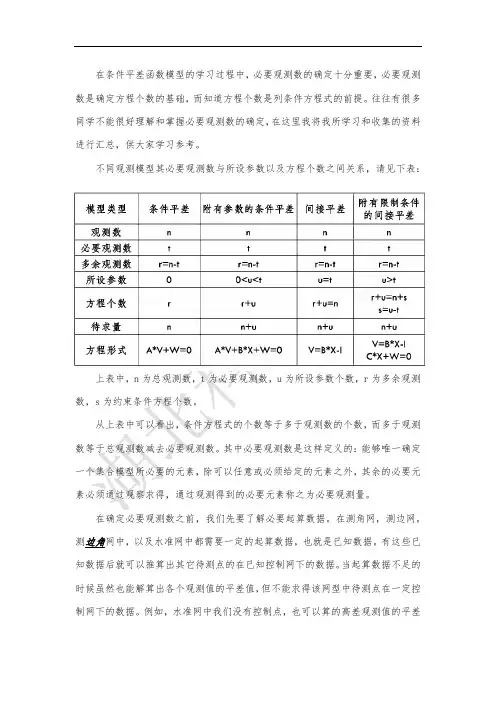
测量平差中必要观测数的确定方法一、控制网必要起算数据概述1.控制网必要起算数据的要求:见下表。
控制网种类必要起算数据个数必要起算数据种类水准网测角网测边网/边角网/导线网143一点高程两点坐标或一点坐标、一边长和一边方位角一点坐标和一边方位角2.平差计算时控制网的起算数据必须满足要求也就是说,确定必要观测数t时,控制网的起算数据一定已经满足了要求。
满足要求的起算数据不仅种类满足要求,且其个数一定等于或大于其必要起算数据的个数。
起算数据满足要求有两种情况:一是控制网的起算数据本身就满足要求;另一是控制网的起算数据本身不满足要求,经假定或实测补足后满足要求。
补充的起算数据也视为已知。
二、控制网必要观测数的计算方法起算数据可分为两类:一类是点位起算数据,如坐标、高程等;另一类是非点位起算数据,常见为平面控制网中的方位角、边长等。
水准网中无此类起算数据。
下面分别就这两种情况来讨论必要观测数t的确定。
1.起算数据只含点位起算数据,不含非点位起算数据。
显然,水准网的必要观测数t就是此类未知点(高程)的个数;而平面控制网的必要观测数就是此类未知点坐标的个数,也即为点数的2倍。
若以P表示控制网中未知点的个数,则此种情况下必要观测数t的计算方法为水准网:t=P平面控制网:t=2P2.起算数据既含有点位起算数据,又包含非点位起算数据。
包含非点位起算数据只有平面控制网。
这类数据都对应着一条边——有两个端点。
根据该边与控制网的连接情况,非点位起算数据又分为两类:一类是两端点都包含在控制网内部,如图5中的S0、α1、α2,图7中的α0,图9中的α1等,称为第一类非点位起算数据。
另一类是一端与控制网相连,一端自由,该边好像悬挂于控制网上,一般为已知方位角,如图6中的α0,图9中的αA、αB、αC等,称为第二类非点位起算数据或悬挂边。
如果假设非点位起算数据未知,也即网中只有点位起算数据。
则可看出:第一类非点位起算数据与确定未知点坐标有关:确定未知点坐标需要测定方位角、距离。
导线测量一、导线测量概述导线——测区内相邻控制点连成直线而构成的连续折线(导线边)。
导线测量——在地面上按一定要求选定一系列的点依相邻次序连成折线,并测量各线段的边长和转折角,再根据起始数据确定各点平面位置的测量方法。
主要用于带状地区、隐蔽地区、城建区、地下工程、公路、铁路等控制点的测量。
导线的布设形式:附合导线、闭合导线、支导线,导线网。
附合导线网自由导线网钢尺量距各级导线的主要技术要求注:表中n为测站数,M为测图比例尺的分母表6J-1 图根电磁波测距附合导线的技术要求二、导线测量的外业工作1.踏勘选点及建立标志2.导线边长测量光电测距(测距仪、全站仪)、钢尺量距当导线跨越河流或其它障碍时,可采用作辅助点间接求距离法。
(α+β+γ)-180o改正内角,再计算FG边的边长:FG=bsinα/sinγ3.导线转折角测量一般采用经纬仪、全站仪用测回法测量,两个以上方向组成的角也可用方向法。
导线转折角有左角和右角之分。
当与高级控制点连测时,需进行连接测量。
三、导线测量的内业计算思路:①由水平角观测值β,计算方位角α;②由方位角α及边长D, 计算坐标增量ΔX 、ΔY;③由坐标增量ΔX 、ΔY,计算X、Y。
(计算前认真检查外业记录,满足规范限差要求后,才能进行内业计算)坐标正算(由α、D,求X、Y)已知A(x A,y A),D AB,αAB,求B点坐标x B,y B。
坐标增量:待求点的坐标:(一)闭合导线计算图6-10是实测图根闭合导线示意图,图中各项数据是从外业观测手簿中获得的。
已知数据:12边的坐标方位角:12 =125°30′00″;1点的坐标:x1=500.00,y1=500.00现结合本例说明闭合导线计算步骤如下:准备工作:填表,如表6-5 中填入已知数据和观测数据.1、角度闭合差的计算与调整:n边形闭合导线内角和理论值:(1) 角度闭合差的计算:例:fβ=Σβ测-(n-2)×180o=359o59'10"-360o= -50";闭合导线坐标计算表(6-5)(2) 角度容许闭合差的计算(公式可查规范)(图根导线)若:f测≤ fβ容,则:角度测量符合要求,否则角度测量不合格,则1)对计算进行全面检查,若计算没有问题,2)对角度进行重测本例:fβ= -50″根据表6-5可知,=±120″则fβ<fβ容,角度测量符合要求3) 角度闭合差fβ的调整:假定调整前提是:假定所有角的观测误差是相等的,角度改正数:(n—测角个数)角度改正数计算,按角度闭合差反号平均分配,余数分给短边构成的角。
野外地形数据采集与数据处理一、地形点的描述信息测量的基本工作是测定点位,直接测定点的坐标确定点位,或者通过测量水平角、竖直角、距离来确定点位。
数字测图是通过计算机软件自动处理(自动识别、自动检索、自动连接、自动调用图式符号等),自动绘出所测的地形图。
因此,对地形点必须同时给出点位信息及绘图信息。
数字测图中地形点的描述必须具备3类信息:1.测点的三维坐标;2.测点的属性,即地形点的特征信息; (地貌点还是地物点)测点的连接关系。
3.其中,第一项是定位信息,后两项是绘图信息。
测点是要标明点号,点号在测图系统中是惟一的,根据它可以提取点位坐标。
二、地形编码计算机是通过测点的属性信息来识别测点是哪一类特征点,用什么图式符号来表示,数字测图中是用编码来代替地物的名称和代表相应的图式符号以表明测点的属性信息。
地形编码是一种人为的约定,是联系内业与外业的一种纽带。
我国一推出了关于地形图图式,地形图要素分类代码等国家标准:如《1:500 1 :1000 1 :2000 地形图图式》,1 :《5000 1 :10000 地形图图式》,1 :500 1 :1000 1 :2000 地形图要素分类代码》,《国土基础信息数据分类与代码GB1804-93》等等。
这些标准是我们制定地形编码的重要依据。
地形信息共分九大类,并挨次细分为小类、一级和二级。
分类代码由四位数字码组成:X大类码代码1X小类码名称测量控制点X一级代码代码2X二级代码名称居民地11 平面控制点111 三角点1111 一等1112 二等1113 三等1114 四等在《国土基础信息数据分类与代码GB-13923-92》中,在上述编码基础上又扩充一位:识别位。
(一)、地形编码的原则1. 符合国标、图式分类,符合地形绘图的习惯;2. 力求简洁,便于操作和记忆,符合测量员的习惯;3. 便于计算机处理;4. 编码要有系统性、科学性和可扩充性。
(二)、常见编码方法按照《1:500 1 :1000 1:2000 地形图图式》,地形要素分为十类:(1) 测量控制点(2) 居民地(3) 共矿企业建造物和公共设施(4) 独立地物(5) 道路及附属设施(6) 管线及垣栅(7) 水系及附属设施(8) 境界(9) 地貌与土质(10) 植被常见编码1. 三位整数编码2. 四位整数编码3. 五位整数编码4. 六位整数编码5. 七位整数编码6. 八位整数编码7. 拼音字母编码8. “无编码”系统9. “无记忆编码系统”三、连接信息连接信息可分为连接点和连接线型。
目录摘要 (1)第1章测边网坐标平差 (2)1.1近似坐标计算 (3)1.2计算误差方程的系数及常数项 (4)1.3误差方程 (4)1.4计算观测值的权 (5)1.5组成法方程 (5)1.6平差值计算 (5)1.6.1 坐标平差值 (5)1.6.2 边长平差值计算 (6)1.7精度计算 (6)1.7.1 单位权中误差 (6)1.7.2 待定点坐标中误差 (6)第2章三角网坐标平差 (7)2.1测角网函数模型 (8)2.2坐标方位角计算 (9)2.2.1 近似坐标方位角计算 (9)2.2.2 坐标方位角计算 (9)2.3近似坐标增量、近似边长与误差方程系数 (9)2.4误差方程的组成 (10)2.5确定权和组成法方程 (11)2.6法方程系数阵的逆阵与参数改正数 (11)2.7平差值计算及精度评定 (11)2.7.1 待定点的最或然值 (11)2.7.2 观测值的改正数 (12)2.7.3 点位中误差 (12)2.7.4 观测值平差值 (12)第3 章导线网间接平差 (13)3.1计算各边坐标方位角改正数方程的系数 (15)3.2确定角和边的权 (16)3.3计算角度和边长误差方程系数和常数项 (17)3.4误差方程的组成和解 (17)3.5平差值计算 (22)3.6精度计算 (22)3.6.1 单位权中误差 (22)3.6.2 待定点点位中误差计算 (22)参考文献 (23)指导老师评语 (24)摘要本课程设计介绍了综合运用测量平差基础知识来解决测边网、三角网、导线网坐标平差及精度评定问题,先设定未知参数,根据空间几何关系找出相应的平差模型,按照间接平差的原理,列出观测值误差方程,求出法方程的各系数矩阵,解算未知参数、观测值的改正数,最后进行精度评定,完成课题要求。
通过这一课题,拓宽我们测量数据处理的知识面,启发我们处理实际生产问题的新思路,针对某一实际问题,用经典的误差理论和比较前沿的数据处理方法进行合理的求解,以巩固和加强我们对误差理论和现代测量数据处理方法的理解,增强我们用所学的理论方法解决实际问题的能力。
关键字:平差误差方程法方程平差值精度评定第1章 测边网坐标平差1.有测边网如下图所示。
网中A 、B 、C 及D 为已知点,P1、P2、P3及P4为待定点,现用某测距仪观测了13条边长,测距精度()S mm s 10613-⨯+=σ起算数据及观测边长见表7-17。
试按间接平差法求待定点坐标平差值及其中误差。
起算数据和观测数据点名 坐标(m )边长(m ) 坐标方位角º ˊ " X Y A 53743.136 61003.826 7804.558 138 00 08.6 B 47943.002 66225.854 C 40049.229 53782.790 7889.381 113 19 50.8 D 36924.72861027.086 编号 边观测值(m ) 编号 边观测值(m ) 编号 边观测值(m ) 1 5760.705 6 8720.162 11 5487.073 2 5187.342 7 5598.570 12 8884.589 3 7838.880 8 7494.881 13 7228.3674 5483.158 9 7493.323 55731.788105438.380解:由题意有n=13,t=8选待定点4321,,,P P P P 的坐标为参数,即)ˆ,ˆ(),ˆ,ˆ(),ˆ,ˆ(),ˆ,ˆ(444333222111Y X P Y X P Y X P Y X P ====1.1 近似坐标计算1P 的近似坐标由已知点A 、B 和观测边21,S S 交会计算得。
如下图中设h 为三角形1ABP 底边AB 上的高,S为S2在A 上的投影。
得 129.3500221222=-+=ABS AB S S m 526.3828222=-=S S h m所以待定点1P 的近似坐标为⎭⎬⎫=-++==-++=m h S Y Y m h S X X BA AB A BA AB A 505.60500)90sin(sin 270.48580)90cos(cos 0101αααα同理由A P 、1及S 3、S 4交会计算2P 点的近似坐标;由P 1、P 2及S 10、S 5交会计算P 3点的近似坐标;由P 1、P 3及S 12、S 9交会计算P 4点的近似坐标。
其近似坐标结果为:390.4868102=X 280.5501802=Y 224.4376703=X 596.5796803=Y218.4084304=X 877.6486704=Y1.2 计算误差方程的系数及常数项按公式:i k jkjkk jkjk j jkjkj jkjk i l ySY xSX ySY xSX v -∆+∆+∆-∆-=ˆˆˆˆ000000 0jk i i S S l -=计算误差方程的系数和常数项,由已知点坐标和待定点近似坐标计算系数及常数项结果见表1-1:根据表中的a 、b 系数及常数项l 可列出全网的误差方程,其系数和常数项结果列于表1-2中,共13个误差方程:表1-2 系数、常数项、改正数及边长平差值列表1.4 计算观测值的权将上表中的边长观测值代入测距精度公式:i S bS a i+=σ 220iiSS P σσ=,算的各边的测距精度iS σ,并设mm 100=σ,由此算得各条边的权,其结果均列于下表中。
Pl B xPB B T T =ˆ,Pl B T 及其解i x ˆ、i y ˆ列于下表中, 表1-4 坐标平差值求11)(--=PB B N TBB ,列于表中。
表1-5 参数的协因数1.6.1坐标平差值 按公式i ii x X X ˆˆ+=计算: 1011ˆˆx X X +==48580.268m 1011ˆˆy Y Y +==60500.500m 2022ˆˆx X X +==48681.382m 2022ˆˆy Y Y +==55018.290m 3033ˆˆx X X +==43767.189m 3033ˆˆy Y Y +==57968.610m1.6.2边长平差值计算 按公式V S S+=ˆ计算: 1011ˆˆv S S +==5760.711m 2022ˆˆv S S +==5187.344m 3033ˆˆv S S +==7838.878m 4044ˆˆv S S +==5483.143m 5055ˆˆv S S +==5731.813m 6066ˆˆv S S +==8719.088m 7077ˆˆv S S +==5598.642m 8088ˆˆv S S +==7494.959m 9099ˆˆv S S +==7493.356m 1001010ˆˆv S S +==5438.400m 1101111ˆˆv S S +==5486.903m 1201212ˆˆv S S +==8884.550m 1301313ˆˆv S S +==7228.488m 1.7 精度计算1.7.1单位权中误差:tn PVV T -=0ˆσ=813662.0-=0.36dm 1.7.2待定点坐标中误差:由参数的协因数阵(即1-BB N )取得参数的权倒数,计算待定点坐标点点位中误差:23.042.036.0ˆ1==X σdm 26.051.036.0ˆ1==Y σdm 35.026.023.0ˆˆˆ2222111=+=+=Y X P σσσdm29.067.036.0ˆ2==X σdm 31.074.036.0ˆ2==Y σdm 42.031.029.0ˆˆˆ2222222=+=+=Y X P σσσdm24.044.036.0ˆ3==X σdm 31.072.036.0ˆ3==Y σdm 39.031.024.0ˆˆˆ2222333=+=+=Y X P σσσdm26.053.036.0ˆ4==X σdm 34.091.036.0ˆ4==Y σdm 43.034.026.0ˆˆˆ2222444=+=+=Y X P σσσdm第2章 三角网坐标平差2.在下图所示的测角网中,A,B,C 为已知点,1P ,2P 为待定点,S1~S10为角度观测值,已知点坐标与待定点近似坐标为:点号 已知坐标/m点号 近似坐标/mX Y X Y A 883.2892 259.1385 P 1 777.416 320.647 B 640.2838 144.1899 P 2 844.971504.160C612.0508463.8277同精度观测值为:编号 观测值 º ˊ " 编号 观测值 º ˊ " 1 55 28 13.2 6 59 57 57.2 2 97 41 53.9 7 69 19 22.1 3 93 02 06.0 8 99 56 38.2 4 44 03 51.6 9 29 05 51.3 550 42 44.31050 57 29.0 是按坐标平差法求:(1) 误差方程及法方程;(2) 待定点最或是坐标及点位中误差; (3) 观测值改正值及平差值。
解:由题意有:t=4,设待定点1P ,2P 的坐标的平差值为参数,即)ˆ,ˆ(111Y X P =,)ˆ,ˆ(222Y X P =。
2.1 测角网函数模型:11ˆˆA AB L αα-= B A L 112ˆˆˆαα-= C B L 113ˆˆˆαα-= CB C L 114ˆˆˆαα-= 125ˆˆˆC C L αα-= C L 2216ˆˆˆαα-= 1217ˆˆˆαα-=C L A L 1128ˆˆˆαα-= 2129ˆˆˆαα-=A L 2110ˆˆˆA A L αα-= 其中i i i V L L +=ˆ,i i i x X X ˆˆ0+=,i i i y Y Y ˆˆ0+=,i j i j ij X X Y Y --=arctan α,ij i j ij X X Y Y ˆˆˆˆarctan ˆ--=α,0000arctanij i j ijX X Y Y --=α,0i i i L L l -=,将以上式子带入并线性化得:11201011201011ˆ)(ˆ)(l yS X xS Y V A A A A -∆''-∆''=ρρ 212010120101120101201012ˆ))()((ˆ))()((l yS X S X xS Y S Y V BBAABBAA-∆''-∆''-∆''-∆''=ρρρρ 312010120101120101201013ˆ))()((ˆ))()((l yS X S X xS Y S Y V C CB BC CB B-∆''-∆''-∆''-∆''=ρρρρ 4120111201014ˆ)(ˆ)(l yS X xS Y V C C C C -∆''+∆''-=ρρ 52202022202021201011201015ˆ)(ˆ)(ˆ)(ˆ)(l yS X xS Y yS X xS Y V C C C C C C C C -∆''+∆''-∆''-∆''=ρρρρ 6220202202121220202202121120212112021216ˆ))()((ˆ))()((ˆ)(ˆ)(l yS X S X xS Y S Y yS X xS Y V CCCC-∆''-∆''-∆''-∆''+∆''+∆''-=ρρρρρρ 7220121222012121201212201011201212201017ˆ)(ˆ)(ˆ))()((ˆ))()((l yS X xS Y yS X S X xS Y S Y V C CC C-∆''-∆''+∆''-∆''-∆''-∆''=ρρρρρρ 8220121222012121201012012121201012012128ˆ)(ˆ)(ˆ))()((ˆ))()((l yS X xS Y yS X S X xS Y S Y V AAAA-∆''+∆''-∆''-∆''-∆''-∆''=ρρρρρρ 9220212120202220212120202120212112021219ˆ))()((ˆ))()((ˆ)(ˆ)(l yS X S X xS Y S Y yS X xS Y V AAAA-∆''-∆''-∆''-∆''+∆''-∆''=ρρρρρρ 1022020222020212010112010110ˆ)(ˆ)(ˆ)(ˆ)(l yS X xS Y yS X xS Y V A A A A A A A A -∆''-∆''+∆''+∆''-=ρρρρ2.2 坐标方位角计算2.2.1 近似坐标方位角计算按公式00000arctaniji j ijXX Y Y --=α得:近似坐标方位角按公式ij i j ij X X Y Y --=arctanα得:8.5581205'''=AB a ,8.512095'''= BC α2.3 近似坐标增量、近似边长与误差方程系数按公式i i P j j p Y Y Y -=∆0,i i P j j p X X X -=∆0 ,2220)()()(ii i P j P j j p Y Y X X S -+-=,200)(ij ij ij S Y a ∆''=ρ,200)(ijijij S X b ∆''-=ρ得:2.4 误差方程的组成按公式i h jh h jh k jk k jk j jh jk j jh jk i l y b x a y b x a y b b xa a V -++---+-=ˆˆˆˆˆ)(ˆ)( 000)(i i jh jk i i L L a a L l -=--=得:8.0ˆ5660.14ˆ4623.8111++=y xV 9.3ˆ2296.20ˆ1745.1112---=y xV 8.0ˆ4653.1ˆ4603.13113+--=y xV 6.1ˆ1289.7ˆ1725.6114++=y xV 3.3ˆ5978.8ˆ4888.1ˆ1289.7ˆ1725.622115-+---=y x y xV 8.1ˆ9540.4ˆ4096.8ˆ6438.3ˆ8984.922116+---=y x y xV 1.2ˆ6438.3ˆ8984.9ˆ7727.10ˆ7259.322117--++-=y x y xV 0.5ˆ6438.3ˆ8984.9ˆ9222.10ˆ3607.1822118++-+=y x y xV 6.1ˆ9289.4ˆ6811.1ˆ6438.3ˆ8984.922119+-++-=y x y xV 1.5ˆ2851.1ˆ2173.8ˆ5660.14ˆ4623.8221110-++--=y x y xV2.5 确定权和组成法方程因为是等精度观测即:令E P = , ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--==85921.257214.119854.229593.175Pl B W T ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--------==9644.1500007.413754.7928588.160007.412447.339791.73851.3783754.79791.73263.11992787.46628588.16851.3782787.466934.948PB B N T BB由0ˆ=-W xN BB 得法方程: ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--------9644.1500007.413754.792859.160007.412447.3397910.738514.3783754.797910.732630.11992787.4662859.168514.3782787.4669340.948⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡2211ˆˆˆˆyxy x -⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--85921.257214.119854.229593.175=0 2.6 法方程系数阵的逆阵与参数改正数⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----=-007173.0000999.0000530.0000015.0000999.0005854.0000588.0002609.0000530.0000588.0001147.0000807.0000015.0002609.0000807.0002492.01BBN ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡2211ˆˆˆˆyx y x =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----007173.0000999.0000530.0000015.0000999.0005854.0000588.0002609.0000530.0000588.0001147.0000807.0000015.0002609.0000807.0002492.0⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--85921.257214.119854.229593.175=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-18.040.018.006.0cm 2.7 平差值计算及精度评定 2.7.1 待定点的最或然值为:)(417.7770006.0416.777ˆˆ1011m x X X =+=+= )(645.3200018.0647.320ˆˆ1011m y Y Y =-=+= )(975.8440040.0971.844ˆˆ2022m x X X =+=+= )(162.5040018.0160.504ˆˆ2022m y Y Y =+=+= 即)645.320,417.777(1=P ,)162.504,975.844(2=P 。