动手做-投篮机器人
- 格式:ppt
- 大小:4.73 MB
- 文档页数:28
机器人投篮竞赛规则一、任务:竞赛双方轮番担任进攻方和防守方,进攻方在预备区放置机器人,让机器人躲开防守方放置的防守队员的干扰,投篮得分;防守方在进攻方动身前,在指定防守区域内随意放置4个防守队员,干扰对方进攻。
每个参赛队由两位选手组成,协作完成进攻和防守。
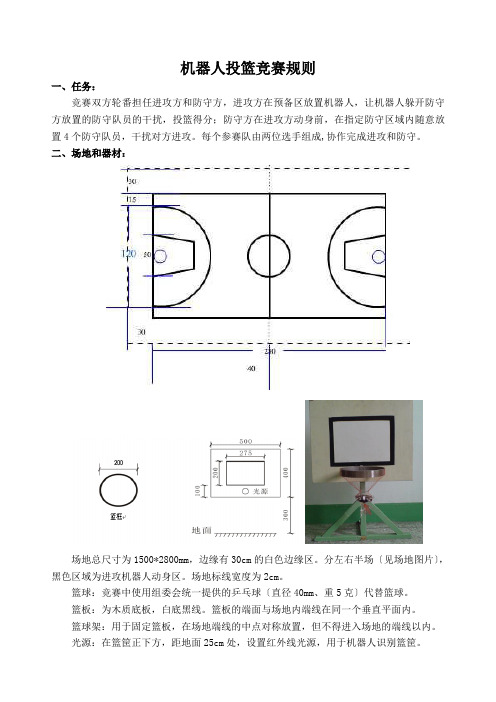
二、场地和器材:场地总尺寸为1500*2800mm,边缘有30cm的白色边缘区。
分左右半场〔见场地图片〕,黑色区域为进攻机器人动身区。
场地标线宽度为2cm。
篮球:竞赛中使用组委会统一提供的乒乓球〔直径40mm、重5克〕代替篮球。
篮板:为木质底板,白底黑线。
篮板的端面与场地内端线在同一个垂直平面内。
篮球架:用于固定篮板,在场地端线的中点对称放置,但不得进入场地的端线以内。
光源:在篮筐正下方,距地面25cm处,设置红外线光源,用于机器人识别篮筐。
投篮机器人动身区:投篮机器人动身时以本方后场的右边线作为动身起点线,越过该线进入场地。
从其他位置进入场地判为犯规。
防守区:防守方除篮下梯形外的整个半场区域,可用来摆放防守队员。
三、细那么:1.抽签:抽签决定第一持球的一方和选择场地。
2.赛前预备:时刻20秒钟,双方选手各悠闲防守区域摆放好4个防守队员位置;进攻方在动身区摆放好投篮机器人。
3.进攻:在裁判吹哨后30秒内,进攻方选手赶忙启动机器人进攻投篮任务,并同时在本方防守区域内摆放好防守队员。
在对方进攻时,防守方选手不得触动本方防守队员。
进攻机器人进入场地后,选手不能再触碰机器人,直至完成投篮或者显现犯规,由裁判吹哨交换球权,方可取回场地内的机器人,以预备下一轮的进攻。
每方进攻限时30秒,交替进行,进攻前预备时刻计入30秒限时之内。
4.得分:机器人能够在前场〔垂直投影全部过中线〕任意位置投篮得分。
投篮时机器人投影完全在三分线外得三分,否那么得2分。
5.犯规:〔1〕撞人犯规:机器人能够碰撞防守队员,但不能推倒防守队员,推倒那么算撞人犯规。
〔2〕出界:机器人投影完全在场地外算出界,交换球权。

第十九届河南省青少年机器人竞赛精准投篮比赛规则1.项目介绍机器人精准投篮比赛是河南省青少年机器人竞赛项目之一,其目的是检验青少年对机器人基础知识的理解和掌握程度,激发青少年对机器人技术的兴趣,培养动手、动脑的能力。
其活动对象为中小学生,要求参加比赛的代表队在现场自行拼装、调试和操作机器人。
参赛队员可以在赛前公布的竞赛场地上,按照本规则进行训练比赛。
2.比赛主题本次竞赛主题是智能运动会。
NBA比赛是影响力最强的篮球比赛,在这几年中,最突出球员之一库里,是一名超级3分队员,他的3分球让人印象深刻,库里3分球的命中率是队伍取胜的关键。
本届比赛就是让队员们在自动化设计方面更进一步,要求制作的机器人必须能够自动投篮,不能人工手动放球。
更增加了投球数量限制,并且需要你制作的机器人有更高的投篮准确度。
3.比赛场地:3.1.比赛场地图为标准篮球场地的半场,按照10:1的比列缩小为长150CM,宽1400mm的喷绘图(绿色区)。
3.2.篮球框离地面约300mm处,篮球框的内直径大于100mm球筐下安装篮球收集箱,确保投进篮筐内的球不会跑出来。
3.3.比赛所使用的球为乒乓球。
4.比赛规则4.1.机器人在比赛时不能用手触碰机器人,可以利用重物来增加机器人稳定性。
如果用手扶或压的方式来稳定机器人,则比赛直接结束。
4.2.场地上设置3个投篮点,编号为1-3,比赛进行2轮,参赛队随机抽取1个编号位置进行投篮,但两轮位置不重复比赛时队员上场将机器人摆放到相应位置,调试时间40秒。
听到口令后开始计时,投篮时间30秒,投球数量最多30个球。
分数按照3分线内每球2分,3分线外每球3分。
4.3.机器人投篮时与场地接触点必须在指定的直径350mm圆形位置内,不能超出,超出后投进球无效,如果超出,需要关闭机器人,调整位置,重新开机投球,计时不停。
4.4.比赛开始后机器人可以任意变形,机器人的变形动作须是自主的,机器人架空的延伸部分,投影不能超出圆形投篮点外100mm范围。

篮筐机器人生:由底座、支撑柱、篮板、篮筐组成。
师:同学们观察的真仔细,正如同学们分析的那样,如果我们要让篮筐移动,那它的底座要做成个小车底盘。
篮筐的支撑杆、篮板和篮筐可以使用方砖和方梁等积木搭建。
介绍电子模块环节师:投中提示功能是怎么实现的呢,我们会用到红外传感器和蜂鸣器,红外传感器能检查前方是否有障碍物,但检测的距离较短,可由主控器的输入端口(INT1/INT2/INT3)控制。
蜂鸣器是一个能发出声音的电子模块,可由主控器的输出端口(OUT1/OUT2/OUT3/OUT4)控制。
让底盘移动起来需要用到电机,电机是一种产生旋转力的动力模块,可以让篮筐机器人底盘动起来,可由主控器的电机驱动接口(M1/M2/M3/M4)控制。
师:同学们想一想,哪个模块是用来检测投篮是否投中?哪个用来提示投篮投中的呢?生:红外传感器用来检测是否投中,蜂鸣器用来发生提示。
师:所以,红外传感器和蜂鸣器分别应该安装在哪个部位?生:红外传感器应该安装在篮筐的位置,蜂鸣器位置没有特殊要求。
搭建环节师:好的,那先让我们搭建篮筐机器人的底座,我们以主控器为底座的主体,把电机和轮子安装在合适的位置。
我们只需要2个轮子,作为主动轮,从动轮通过搭建1个或2个支点,来让底座保持平稳,且不影响底座移动。
生:根据理解搭建底座。
师:篮筐机器人的底座都搭建好后,我们接着搭建支撑杆,同学们可以选择合适的积木,以及设定自己要搭建的支撑杆的高度,自由搭建。
不过支撑杆的高度会影响篮筐机器人整体的平稳性,再搭建的过程中需要考虑。
生:学生根据理解搭建支撑杆。
师:篮筐机器人的支撑杆搭建好后,我们来搭建篮板和篮筐,想一想,红外传拓展资料篮球运动常识:篮球(basketball),是以手为中心的身体对抗性体育运动,是奥运会核心比赛项目。
1891年12月21日,由美国马萨诸塞州斯普林菲尔德基督教青年会训练学校体育教师詹姆士·奈史密斯发明。
1896年,篮球运动传入中国天津。
第三届东莞市科协青少年机器人竞赛机器人投篮竞赛规则一、竞赛目标:通过信息技术创新手段,以智能机器人为载体实现一定程度的模拟篮球比赛的过程。
旨在考核参赛选手对操控智能机器人相关知识的综合运用能力,同时又有助于提高青少年的科技体育知识。
二、参赛范围:小学组、初中组、高中组。
三、竞赛规则:(一机器人投篮比赛简介机器人投篮比赛是中小学生,按照比赛的规则要求自行制作机器人并进行编程,使机器人分别在程序控制和手动控制下在赛前公布的特定竞赛场地上进行的比赛活动。
(二竞赛主题机器人投篮比赛的每场比赛中,由红、蓝两方各出两个机器人分别进行自动和手动两部分比赛,各队的机器人分别从各自的红色、蓝色启动区出发,在尽可能短的时间内,在各自的投蓝区投入更多球,以获得尽可能高的得分。
(三比赛场地与环境1、场地比赛场地尺寸:外部尺寸为长2200mm、宽2000mm,周围有高为100 mm的围边。
图1是比赛场地的示意图。
图1 比赛场地示意图(平面图中兰色园为白色球位置2、赛场规格与要求(1机器人比赛场地的地面为哑光场地纸,二边分别有高为600 mm的篮板,正中间各有高为400 mm的内径为300mm的篮框。
(2在哑光场地上有黑色引导线,线宽度为20mm。
以下凡是涉及黑线的尺寸,均指其中心线。
(3场上有一块长600mm、宽300mm的蓝色方形区和一块长600mm、宽300mm的红色方形区,分别是红方和蓝方的机器人启动区。
(4场地上有六块直径为200mm的投篮点区,外圈颜色分别是红色和蓝色,分别是红方和蓝方的机器人投球区。
红方投球区所要投的球蓝为红方球蓝,蓝方投球区所要投的球蓝为蓝方球蓝。
(5比赛所使用的球是国际标准的乒乓球,其直径为40mm,重量为2.7克的橙色乒乓球和白色乒乓球各46个(共计92个。
红方要投的是橙色球,蓝方要投的是白色球。
3.2.6球的摆放位置如场地平面示意图中橙、白色球的摆放位置,场地上共计有80个乒乓球(红、黄各40个,另橙、白色各有6个用于自动时由选手确定是否手动装载到机器人中。

橡皮泥机器人制作方法橡皮泥机器人是一种非常有趣和创造力的手工制作项目。
你可以使用橡皮泥来制作一个可动的机器人,并给它设计出不同动作和特点。
下面是一个简单的橡皮泥机器人制作方法,希望对你有帮助。
材料准备:1. 不同颜色的橡皮泥2. 制作模具(如骨头、眼睛、手臂等)3. 牙签或小棍子4. 线5. 一些小工具(如小刀、小剪刀等)制作步骤:1. 确定机器人的形状和大小,你可以自己设计或者参考一些机器人的图案。
2. 开始制作机器人的身体部分。
将所需颜色的橡皮泥揉成一个球状,并按照机器人的形状,在桌子上轻轻滚动揉成所需形状的身体。
3. 制作机器人的头部。
用同样的方法,将橡皮泥揉成一个稍微大一点的球状,并在底部用手指轻轻按压凹陷处,制作出一个凹陷的地方,作为机器人的面部。
4. 将机器人的头部连接到身体上。
使用牙签或小棍子,在头部的凹陷处插入,然后再插入机器人的身体中。
5. 制作机器人的面部。
你可以使用不同颜色的橡皮泥来制作眼睛、嘴巴和鼻子等部位。
可以使用模具来塑造出比较完美的形状,然后将它们粘附到机器人的头部上。
6. 制作机器人的四肢。
使用橡皮泥揉成四根长条状,作为机器人的手臂和腿部。
可以用小刀或小剪刀修剪橡皮泥,使其更加光滑和匀称。
7. 将机器人的四肢连接到身体上。
使用牙签或小棍子将手臂和腿部插入到机器人身体的相应位置。
8. 设计机器人的特征。
根据你的喜好,可以给机器人添加一些独特的特征,如骨头、翅膀、装饰等。
同样,你可以使用模具或手工塑造来制作这些特征。
9. 为机器人添加细节。
可以使用纹理工具或小工具在机器人的身体和面部添加一些细节,如纹理、花纹等,使其更加逼真或富有个性。
10. 完成机器人的装饰。
根据你的创意和喜好,可以给机器人的身体添加一些装饰,如五颜六色的小球、金属片等,使其更加华丽和吸引人。
总结:橡皮泥机器人的制作可以说是一项非常有趣和创造力的手工制作项目。
通过自己设计和动手操作,你可以制作出一个独特的机器人,并赋予它不同的特征和动作。
论文题目:投篮机器人学生姓名:张新新所在院系:北京信息职业技术学院所学专业:机电一体化导师姓名:吕慧敏机器人科学是一门综合了机械、电子、材料、计算机、传感器、仿生、人工智能等多种前沿科学的综合性学科,是最能体现一个国家基础科学技术和制造业水平的学科之一。
1920年捷克作家卡雷尔·卡佩克发表了科幻剧本《罗萨姆的万能机器人》。
在剧本中,卡佩克把捷克语“Robota”写成了“Robot”,“Robota”是奴隶的意思。
该剧预告了机器人的发展对人类社会的悲剧性影响,引起了大家的广泛关注,被当成了机器人一词的起源。
在该剧中,机器人按照其主人的命令默默地工作,没有感觉和感情,以呆板的方式从事繁重的劳动。
后来,罗萨姆公司取得了成功,使机器人具有了感情,导致机器人的应用部门迅速增加。
在工厂和家务劳动中,机器人成了必不可少的成员。
为了防止机器人伤害人类,科幻作家阿西莫夫于1940年提出了“机器人三原则”:(1)机器人不应伤害人类;(2)机器人应遵守人类的命令,与第一条违背的命令除外;(3)机器人应能保护自己,与第一条相抵触者除外。
1.目前研究的概况和发展趋势当今世界,机器人特别是工业机器人已经发展成为一个规模巨大的产业。
据粗略估算,全球现在至少有76万台机器人正投入使用。
中国于1972年开始研制自己的工业机器人。
我国于1985年研制成功第一台弧焊机器人,距世界最早的机器人实用机型推出晚了23年。
目前,我国从事机器人研发、制造的单位已达200多家。
2000年,我国工业机器人的拥有量约为3500台,其中国产的占五分之一。
但是由于我国机器人产业化起步较晚,步伐较慢,基础工业力量比较薄弱,致使工业机器人长期大量依赖进口。
研究与市场脱节是我国机器人产业化过程中一个急需解决的问题。
同时,我国的企业也缺少大规模集成的经验,难以形成很强的竞争力。
2、目的意义机器人科学是一门综合了机械、电子、材料、计算机、传感器、仿生、人工智能等多种前沿科学的综合性学科,是最能体现一个国家基础科学技术和制造业水平的学科之一。
投篮机器人设计第一章绪论1.1机器人概述.............................. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. 11.2...................................... .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. 21.3.................................. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .41.4............................................ .. .. .. .. .. .. .. .. .. .. .. .. .. (5)第二章系统架构与相关技术基础2.1 硬件设计.. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. . . .. .. ..2.1.1 处理器.. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. . . ..2.1.2CCD.. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..2.1.3 超声波.. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. . . .. .. .. .. ..2.2图像的基本知识.. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..2.3多传感器信息融合.. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..2.4 路径规划.. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..第三章投篮机器人总体结构设计............................................... 3.1 题目分析.. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..3.2 总体设计.. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..第四章算法设计.. .. .. .. .. .. .. .... .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. 4.1 路径识别.. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..4.2SIA.. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..第五章软件实现与仿真 (7)3 致谢...................................................................... .. (72)参考文献...................................................................... (73)附录...................................................................... .. (73)1.1机器人概述机器人综合了多学科的发展成果,代表了高技术的发展前沿,其在人类生活应用领域的不断扩大引起国际上重新认识机器人技术的作用和影响。