实验六 连续时间系统的零极点分析
- 格式:doc
- 大小:117.50 KB
- 文档页数:8
实验六 连续时间系统的复频域分析一、实验目的:1、熟悉拉普拉斯变换的物理意义及基本性质。
2、掌握用拉普拉斯变换求解连续时间LTI 系统的时域响应的方法。
3、掌握系统函数的概念,掌握系统函数的零、极点分布(零、极点图)与系统的稳定性、时域特性等之间的相互关系。
4、掌握用MATLAB 语言对系统进行变换域分析的编程方法。
5、掌握用MATLAB 求解拉普拉斯反变换的方法。
二、实验原理:1、连续时间LTI 系统的复频域描述除了时域描述系统的数学模型微分方程以外,描述系统的另一种数学模型就是建立在拉普拉斯变换基础上的“系统函数(System Function )”——H (s ):[][])()()()()(t x L s X t y L s Y s H 换系统激励信号的拉氏变换系统冲激响应的拉氏变→→=5.1 系统函数H (s )的实质就是系统单位冲激响应h (t )的拉普拉斯变换。
因此,系统函数也可以定义为:⎰∞∞--=dt e t h s H st )()(。
因此求系统函数的方法,除了按照定义式的方法之外,更常用的是对描述系统的线性常系数微分方程经过拉氏变换之后得到系统函数H (s )。
假设描述一个连续时间LTI 系统的线性常系数微分方程为:∑∑===M k k k k Nk k k k dt t x d b dt t y d a 00)()( 5.2 对5.2式两边做拉普拉斯变换,则有∑∑===Mk k k N k k k s X s b s Y s a00)()(即 ∑∑====N k kk M k k k s as b s X s Y s H 00)()()( 5.3 5.3式说明,对于一个能够用线性常系数微分方程描述的连续时间LTI 系统,它的系统函数是一个关于复变量s 的有理多项式的分式,其分子和分母的多项式系数与系统微分方程左右两端的系数是对应的。
由此,可以很容易的根据微分方程写出系统函数表达式,或者根据系统函数表达式写出系统的微分方程。
目录实验一、MATLAB 基本应用实验二、实验二信号的时域表示实验三、连续信号卷积实验四、典型周期信号的频谱表示实验五、傅立叶变换性质研究实验六、系统的零极点分析实验七离散信号分析实验一 MATLAB 基本应用一、实验目的:学习MATLAB的基本用法,了解 MATLAB 的目录结构和基本功能以及MATLAB在信号与系统中的应用。
二、实验内容:例一已知x的取值范围,画出y=sin(x)的图型。
参考程序:x=0:0.05:4*pi;y=sin(x);plot(y)例二计算y=sin(π/5)+4cos(π/4)例三已知z 取值范围,x=sin(z);y=cos(z);画三维图形。
z=0:pi/50:10*pi;x=sin(z);y=cos(z);plot3(x,y,z)xlabel('x')ylabel('y')zlabel('z')例四已知x的取值范围,用subplot函数绘图。
参考程序:x=0:0.05:7;y1=sin(x);y2=1.5*cos(x);y3=sin(2*x);y4=5*cos(2*x);subplot(2,2,1),plot(x,y1),title('sin(x)') subplot(2,2,2),plot(x,y2),title('1.5*cos(x)') subplot(2,2,3),plot(x,y3),title('sin(2*x)') subplot(2,2,4),plot(x,y4),title('5*cos(2*x)')单位阶跃信号 u(t+3)-2u(t)其中 u(t)=1/2+(1/2)sign(t)Sigh(t)是符号函数t>0时为1,t<0时为-1;clear all%利用maple中的heaviside函数来实现u(t+3)-2u(t)syms tf=maple('Heaviside(t+3)-2*Heaviside(t)');t1=-3*pi:0.01:3*pi;%注意精度问题ff=subs(f,t,t1);figure(1);plot(t1,ff);axis([-5,5,-1.2,1.2]);title('u(t+3)-2u(t)');%利用自己编写的heaviside函数来实现u(t+3)-2u(t)t=-5:0.01:5;f=Heaviside(t+3)-2*Heaviside(t);figure(2);plot(t,f);axis([-5,5,-1.2,1.2]);title('u(t+3)-2u(t)')%利用符号函数来实现u(t)t=-5:0.05:5;f=sign(t);ff=1/2+1/2*f;figure(3);plot(t,ff);axis([-5 5 -0.1 1.1]);title('u(t)')%利用符号函数来实现u(t+3)-2u(t)t=-5:0.01:5;f=(1/2+1/2*sign(t+3))-2*(1/2+1/2*sign(t));figure(4)plot(t,f),axis([-5,5,-1.2,1.2]),title('u(t+3)-2u(t)')MATLAB提供了一个ezplot函数绘制隐函数图形,下面介绍其用法。
lti连续时间系统零状态响应的求解方法1. 介绍在连续时间系统的分析中,零状态响应是指某个系统在初始状态为零的情况下,接收到某个输入信号后的输出响应。
在实际问题中,求解零状态响应是一个重要的任务,本文将介绍lti连续时间系统零状态响应的求解方法。
2. 基本思路求解lti连续时间系统的零状态响应的基本思路是将系统输入分解成一组基函数,然后根据基函数的性质求解对应的输出响应,最后将所有响应按照线性叠加原理相加得到系统的总输出响应。
在lti连续时间系统中,常用的基函数包括单位脉冲响应、单位阶跃响应和正弦信号等。
3. 单位脉冲响应法单位脉冲响应法是求解lti连续时间系统零状态响应的常用方法。
具体方法是将系统的初始状态设置为零,输入信号为单位脉冲函数,然后求解系统对单位脉冲函数的响应,得到系统的单位脉冲响应ht(t),最后将ht(t)与输入信号进行卷积计算,得到系统的零状态响应y(t)。
如下图所示:其中,δ(t)表示单位脉冲函数,ht(t)表示系统的单位脉冲响应,x(t)表示系统的输入信号,y(t)表示系统的零状态响应。
4. 单位阶跃响应法单位阶跃响应法也是求解lti连续时间系统零状态响应的一种常用方法。
具体方法是将系统的初始状态设置为零,输入信号为单位阶跃函数,然后求解系统对单位阶跃函数的响应,得到系统的单位阶跃响应h(t),最后将h(t)与输入信号进行卷积计算,得到系统的零状态响应y(t)。
如下图所示:其中,u(t)表示单位阶跃函数,h(t)表示系统的单位阶跃响应,x(t)表示系统的输入信号,y(t)表示系统的零状态响应。
5. 正弦信号法除了单位脉冲响应法和单位阶跃响应法之外,还可以利用正弦信号作为基函数进行求解。
正弦信号法的基本思路是将输入信号分解成一组正弦信号,并求解系统对每个正弦信号的响应,最后将所有响应按照线性叠加原理相加得到系统的总输出响应。
连续时间系统的时域分析——求零输入响应和零状态响应(总13页)本页仅作为文档封面,使用时可以删除This document is for reference only-rar21year.March成绩评定表课程设计任务书目录1. 引言 (1)2 Matlab入门 (2)介绍 (2)利用编程完成习题设计 (3)3 实现连续时间系统的时域分析常用连续时间信号的类别及原理 (4)编程设计及实现 (4)运行结果及其分析 (7)结论 (20)参考文献 (21)1.引言人们之间的交流是通过消息的传播来实现的,信号则是消息的表现形式,消息是信号的具体内容。
本文概述了信号仿真系统的需求、总体结构、基本功能。
重点介绍了利用Matlab 软件设计实现信号仿真系统的基本原理及功能,以及利用Matlab软件提供的图形用户界面(Graphical User Interfaces ,GUI)设计具有人机交互、界面友好的用户界面。
本文采用Matlab的图形用户界面设计功能, 开发出了各个实验界面。
在该实验软件中, 集成了信号处理中的多个实验, 应用效果良好。
本系统是一种演示型软件,用可视化的仿真工具,以图形和动态仿真的方式演示部分基本信号的传输波形和变换,使学习人员直观、感性地了解和掌握信号与系统的基本知识。
近年来,计算机多媒体教育手段的运用逐步普及,大量优秀的科学计算和系统仿真软件不断涌现,为我们实现计算机辅助教学和学生上机实验提供了很好的平台。
通过对这些软件的分析和对比,我们选择MATLAB语言作为辅助教学工具,借助MATLAB 强大的计算能力和图形表现能力,将《信号与系统》中的概念、方法和相应的结果,以图形的形式直观地展现给我们,大大的方便我们迅速掌握和理解老师上课教的有关信号与系统的知识。
MATLAB 是一个包含大量计算算法的集合。
其拥有600多个工程中要用到的数学运算函数,可以方便的实现用户所需的各种计算功能。
函数中所使用的算法都是科研和工程计算中的最新研究成果,而前经过了各种优化和容错处理。

大连理工大学实验报告学院(系): 信息与通信工程 专业: 班级: 姓 名: 学号: 组: ___实验时间: 实验室: 实验台:指导教师签字: 成绩:实验二 连续时间系统分析一、实验目的1 建立系统的概念2 掌握连续时间系统的单位冲激响应的求解3 掌握连续时间系统单位阶跃响应的求解4 掌握连续时间系统零极点的求解5 分析系统零极点对系统幅频特性的影响6 分析零极点对系统稳定性的影响7 介绍常用信号处理的MA TLAB 工具箱二、习题1. 已知系统的微分方程为()()()()()''324y t y t y t x t x t ⅱ++=+,计算该系统的单位冲激响应和单位阶跃响应 代码如下: b=[1,4]; a=[1,3,2]; sys=tf(b,a); t=0:0.1:10;y=impulse(sys,t); plot(t,y);xlabel('时间')ylabel('单位冲激响应')时间单位冲激响应b=[1,4]; a=[1,3,2]; sys=tf(b,a); t=0:0.1:10; y=step(sys,t); plot(t,y);xlabel('时间')ylabel('单位阶跃响应')时间单位阶跃响应2. 实现卷积()*()f t h t ,其中:()2[()(2)],()()t f t t t h t e t e e e -=--= 代码如下: clc clearp=0.01; nf=0:p:2; f=2*((nf>=0)-(nf>=2));nh=0:p:1000; h=exp(-1*nh); y=conv(f,h)*p;subplot(3,1,1),stairs(nf,f); title('f(t)');axis([0 3 0 2.1]); subplot(3,1,2),stairs(nh,h); title('h(t)');axis([0 10 0 1.1]); subplot(3,1,3),plot(y);title('y(t)=f(t)*h(t)');axis([0 200 0 2.1]);00.51 1.52 2.5312f(t)0123456789100.51h(t)02040608010012014016018020012y(t)=f(t)*h(t)3. 已知二阶系统方程'''11()()()()c c R u t u t u t t L LC LCd ++= 对下列情况分别求单位冲激响应()h t ,并画出其波形。

实验二连续时间系统的时域分析一、实验目的通过使用MATLAB 软件对连续时间线性非时变系统的时域特性进行仿真分析,熟悉IT 系统在典型激励下的响应及特征,熟悉相应MATLAB 函数的调用格式和作用,熟悉井掌握用MATLAB 函数求解冲激响应、阶跃响应、零输入响应、零状态响应及全响应的方法。
二、实验原理(一)连续时间系统的时域分析方法 连续时间线性非时变系统(LTI )的输入()t f 与输出()t y 可以用线性常系数微分方程来描述:()()()()()()()()()()t f b t f b t fb t y a t y a t y a t y a m m n n n n 0'10'111++=++++--如果已知系统的输入信号()t f 及系统的初始条件为()()()()()-----0,,0,0,01'''n y y y y ,就可以利用解析方法求出系统的响应。
线性系统的全响应由零输入响应分量和零状态响应分量组成。
零输入响应是指当输入为零时仅由t=0的初始条件产生的系统响应,零状态响应是当初始条件(在t=0)假定为零时仅由0≥t 时的输入产生的系统响应分量。
零输入响应(单极点时)为:()∑==+++=nk t k tn ttx k n e c ec ec ec t y 12121λλλλ f式中,n c c c 、、、 21为任意待定常数,由初始条件确定。
零状态响应为:()()()τττd t h f t y f -=⎰∞∞-此式是对任意输入()t f ,用单位冲激响应()t h 形式表示的零状态响应()t y f 的公式。
已知()t h 就可确定任意输入()t f 的零状态响应()t y f ,即系统对任意输入的响应都可以用单位冲激响应确定。
系统总响应为:()()()()()τττλd t h f ec t y t y t y tnj j f x j -+=+=⎰∑∞∞-=1对于高阶系统,手工计算非常繁琐。
连续系统函数零极点与离散系统函数零点及系统特性研究摘要:通过对连续系统函数和离散系统函数零极点及冲击响应研究和稳定性的探究和matlab仿真来对比不同条件下的冲击响应和零极点的变化,已达到对离散与连续系统的特性研究。
关键词:连续系统,离散系统,冲激响应,matlab,零极点。
连续系统函数零极点与系统特性研究连续时间系统的稳定性与系统零点无关,与系统的极点有关,而系统零点则影响系统单位冲激响应的幅度和相位。
理解系统的零极点与系统的稳定性之间的关系有利于对系统的理解。
如果给定系统函数H(s),或给定系统微分方程(可以求出系统函数),通过系统函数可以零极点图判断系统的稳定性。
(1)可用Matlab函数pzmap来画出系统的零极点图。
函数pzmap的调用形式为[p,z] = pzmap(sys)其中调用变量sys为系统函数,而sys生成可以利用sys=tf(num,den),num 表示N(s),den表示D(s)。
返回变量p存放系统H(s)的极点,返回变量z存放系统H(s)的零点。
(2)可用Matlab函数impulse来画出系统的单位冲激响应h(t)。
函数impulse的调用形式为h=impulse(num,den,t);其中调用变量num表示N(s),den表示D(s)。
返回变量h存放系统的单位冲激响应h(t)。
从h(t)的图形可以基本判断系统稳定性和零极点的关系。
以系统为例进行研究:•画出系统的零极点,并画出系统单位冲激响应h(t)的波形图。
并与理论图形相比较理论分析:由H(s)可知道原系统方程为y’’(t)-6y’(t)+5y(t)=x’(t)+x(t)则可求系统冲激响应如下:h’’(t)-6h’(t)+5h(t)=0--------r^2-6r+5=0-----------------r1=5;r2=1;h(t)=(ae^(5t)+be^(t))*u(t)带入h’’(t)-6h’(t)+5h(t)=&’(t)+&(t)中,有左右相等解得a=5/8,b=3/8.所以解得h(t)=(5/8*e^(5t)+3/8*e^(t))u(t);程序如下:t=0:0.02:30;A=0.625;B=0.375;c=5;d=1;xt=A*exp(c*t)+B*exp(d*t);plot(t,xt)xlabel('time(s)');title('impulse respone') 结果如下:通过matlab 直接画出冲击响应:程序如下:num=[1 1];den=[1 -6 5];sys=tf(num,den);figure(1);pzmap(sys);t=0:0.02:30;h=impulse(num,den,t); figure(2);plot(t,h);xlabel('time(s)');title('impulse respone') 系统零极点图如下:系统冲级响应图如下:经与理论值比较,图像符合的很好。
实验六 零极点实验及其频响(2)[实验目的]1、 掌握系统函数零极点定义2、 零极点与频响的关系3、 零极点与系统稳定性的关系4、 状态方程的含义5、 使用zplane 函数[实验原理]该实验用MATLAB 中的库函数,如tf2zp(b,a),ss2zp(A,B,C,D),zplane(z,p),freqz(b,a)等。
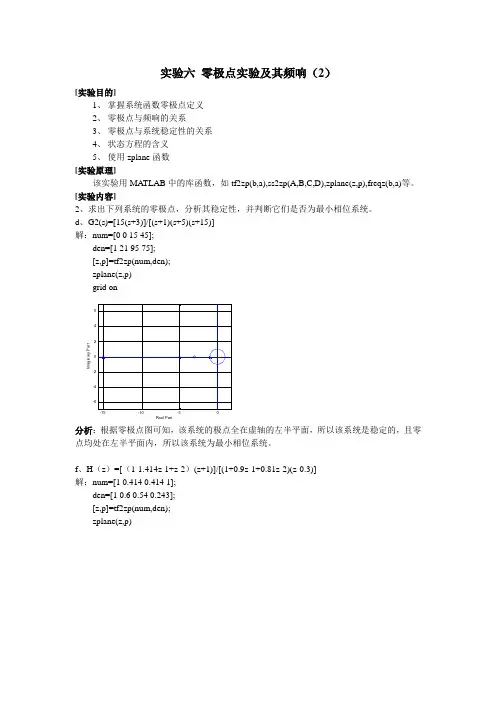
[实验内容]2、求出下列系统的零极点,分析其稳定性,并判断它们是否为最小相位系统。
d 、G2(s)=[15(s+3)]/[(s+1)(s+5)(s+15)]解:num=[0 0 15 45];den=[1 21 95 75];[z,p]=tf2zp(num,den);zplane(z,p)grid onReal Part I m a g i n a r y P a r t分析:根据零极点图可知,该系统的极点全在虚轴的左半平面,所以该系统是稳定的,且零点均处在左半平面内,所以该系统为最小相位系统。
f 、H (z )=[(1-1.414z-1+z-2)(z+1)]/[(1+0.9z-1+0.81z-2)(z-0.3)]解:num=[1 0.414 0.414 1];den=[1 0.6 0.54 0.243];[z,p]=tf2zp(num,den);zplane(z,p)Real Part I m a g i n a r y P a r t分析:由零极点图可知该离散系统的极点全在单位圆内,所以该系统是稳定的,零点在单位圆上,所以该系统是最小相位系统。
3、已知下列H (s )或H (z ),求其频响。
a 、H (z )=1/(1+z-1)解:num=[0 1];den=[1 1];freqz(num,den,128)Normalized Frequency (⨯π rad/sample)P h a s e (d e g r e e s)Normalized Frequency (⨯π rad/sample)M a g n i t u d e (d B )C 、H(z)=(1+z-1)^2/(1+0.61z-2)解:num=[1 2 1];den=[1 0 0.61];freqz(num,den,128)Normalized Frequency (⨯π rad/sample)P h a s e (d e g r e e s)Normalized Frequency (⨯π rad/sample)M a g n i t u d e (d B )。
第1篇一、实验目的1. 理解连续时间系统的基本概念和特性。
2. 掌握连续时间系统建模和仿真方法。
3. 熟悉连续时间系统的分析方法。
4. 培养实验操作能力和数据分析能力。
二、实验原理连续时间系统是指系统中各物理量随时间连续变化的系统。
连续时间系统在工程应用中广泛存在,如电路、信号处理、控制系统等。
本实验主要研究连续时间系统的建模、仿真和分析方法。
三、实验仪器与设备1. 连续时间系统实验箱2. 示波器3. 信号发生器4. 信号分析仪5. 计算机及仿真软件(如MATLAB)四、实验内容及步骤1. 连续时间系统建模(1)根据实验要求,选择合适的连续时间系统,如一阶滤波器、二阶滤波器等。
(2)根据系统特性,确定系统的输入信号和输出信号。
(3)利用实验箱提供的元器件搭建实验电路。
(4)根据元器件参数,推导出系统的传递函数。
2. 连续时间系统仿真(1)利用MATLAB软件,根据推导出的传递函数,建立系统的仿真模型。
(2)设置仿真参数,如采样时间、初始条件等。
(3)运行仿真,观察系统输出波形。
3. 连续时间系统分析(1)分析系统输出波形,观察系统的稳定性和频率响应特性。
(2)根据实验数据,计算系统的幅频特性和相频特性。
(3)分析系统在实际应用中的优缺点。
五、实验结果与分析1. 实验结果(1)根据实验数据和仿真结果,绘制系统输出波形图。
(2)根据实验数据和仿真结果,计算系统的幅频特性和相频特性。
2. 实验分析(1)通过实验和分析,验证了连续时间系统建模和仿真方法的有效性。
(2)分析了系统在实际应用中的优缺点,为实际工程提供了参考。
六、实验结论1. 本实验成功地实现了连续时间系统的建模、仿真和分析。
2. 通过实验,掌握了连续时间系统的基本概念、特性和分析方法。
3. 培养了实验操作能力和数据分析能力。
4. 为今后在实际工程中的应用奠定了基础。
七、实验注意事项1. 实验过程中,注意安全操作,防止触电、短路等事故发生。
2. 实验数据要准确记录,便于后续分析。
实验名称:连续系统的零极点及频率响应特性报告人:姓名班级学号一、实验目的1、掌握系统函数零极点的定义;2、用MA TLAB实现部分分式展开;3、掌握零极点与频率响应的关系;4、掌握极点与系统稳定性的关系。
二、实验内容及运行结果1、已知下列系统函数H(s)或状态方程,求及其零极点,并且画出零极点图,试判断系统是否稳定,根据零极点位置推导单位冲激响应的形式,求解系统的冲激响应h(t)和频率响应H(w)。
(1)num=[1 0 1]; %分子系数,按降幂顺序排列den=[1 2 5]; %分母系数,按降幂顺序排列[z,p]=tf2zp(num,den); %求零点z和极点pfigure(1)zplane(z,p) %作出零极点图sys=tf(num,den);poles=roots(den)figure(2);pzmap(sys)t=0:0.02:10;h=impulse(num,den,t); %绘制冲激响应曲线figure(3);plot(t,h)title('Impulse Respone')[H,w]=freqs(num,den); %绘制频率响应曲线figure(4);plot(w,abs(H))xlabel('\omega')title('Magnitude Respone')poles =-1.0000 + 2.0000i-1.0000 - 2.0000i系统的稳定性和频响特点:由于系统函数的极点位于s虚轴,故系统稳定;并且单位冲激响应是等幅振荡(单位阶跃)信号。
(2)num=[3 -9 6]; %分子系数,按降幂顺序排列den=[1 2 2]; %分母系数,按降幂顺序排列[z,p]=tf2zp(num,den); %求零点z和极点pfigure(1)zplane(z,p) %作出零极点图sys=tf(num,den);poles=roots(den)figure(2);pzmap(sys)t=0:0.02:10;h=impulse(num,den,t); %绘制冲激响应曲线figure(3);plot(t,h)title('Impulse Respone')[H,w]=freqs(num,den); %绘制频率响应曲线figure(4);plot(w,abs(H))xlabel('\omega')title('Magnitude Respone')poles =-1.0000 + 1.0000i-1.0000 - 1.0000i系统的稳定性:由于系统函数的极点位于s右半平面,故系统不稳定;单位冲激响应是随时间增长的信号。
实验六 零极点实验及其频响(2)[实验目的]1、 掌握系统函数零极点定义2、 零极点与频响的关系3、 零极点与系统稳定性的关系4、 状态方程的含义5、 使用zplane 函数[实验原理]该实验用MATLAB 中的库函数,如tf2zp(b,a),ss2zp(A,B,C,D),zplane(z,p),freqz(b,a)等。
[实验内容]2、求出下列系统的零极点,分析其稳定性,并判断它们是否为最小相位系统。
d 、G2(s)=[15(s+3)]/[(s+1)(s+5)(s+15)]解:num=[0 0 15 45];den=[1 21 95 75];[z,p]=tf2zp(num,den);zplane(z,p)grid onReal Part I m a g i n a r y P a r t分析:根据零极点图可知,该系统的极点全在虚轴的左半平面,所以该系统是稳定的,且零点均处在左半平面内,所以该系统为最小相位系统。
f 、H (z )=[(1-1.414z-1+z-2)(z+1)]/[(1+0.9z-1+0.81z-2)(z-0.3)]解:num=[1 0.414 0.414 1];den=[1 0.6 0.54 0.243];[z,p]=tf2zp(num,den);zplane(z,p)Real Part I m a g i n a r y P a r t分析:由零极点图可知该离散系统的极点全在单位圆内,所以该系统是稳定的,零点在单位圆上,所以该系统是最小相位系统。
3、已知下列H (s )或H (z ),求其频响。
a 、H (z )=1/(1+z-1)解:num=[0 1];den=[1 1];freqz(num,den,128)Normalized Frequency (⨯π rad/sample)P h a s e (d e g r e e s)Normalized Frequency (⨯π rad/sample)M a g n i t u d e (d B )C 、H(z)=(1+z-1)^2/(1+0.61z-2)解:num=[1 2 1];den=[1 0 0.61];freqz(num,den,128)Normalized Frequency (⨯π rad/sample)P h a s e (d e g r e e s)Normalized Frequency (⨯π rad/sample)M a g n i t u d e (d B )。
实验六 连续时间系统的零极点分析
实验目的:
1、学会用Matlab 求解系统函数的零极点;
2、学会用Matlab 分析系统函数的极点分布与系统稳定性的关系。
实验原理:
1、系统零极点绘制
系统函数H(s)通常是一个有理分式,其分子和分母均为多项式。
利用Matlab 中的roots 函数,可以求出分子和分母多项式的根,即可计算出H(s)的零极点。
例如:多项式542)(24+++=s s s s N 的根可以由下列语句求出:
N =[1 0 2 4 5];r=roots(N);
求出零极点后以零极点的实部和虚部作图,即可得出零极点的分布图。
例如:执行zs=roots(b);ps=roots(a);(b ,a 分别为分子分母多项式系数向量),再执行plot(real(zs),imag(zs),’o’,real(ps),imag(ps),’x’,’markersize’,12);就能够画出系统的零极点分布图。
绘制系统零极点的分布图再Matlab 中还有一种更加简便的方法,即利用函数pzmap ,调用形式为:
pzmap(sys)
它表示画出由sys 所描述的系统的零极点分布图。
利用sys =tf(b,a)来构建系统模型,这在实验2中已经介绍过,b,a 分别为系统函数H(s)的分子分母多项式系数向量。
2、 系统函数的零极点与系统的稳定性
根据信号与线性系统中的知识我们知道:当系统函数的极点全部位于s 平面的左平面时,系统是稳定的。
在绘制好系统零极点分布图后,就可以根据这个知识点判断系统的稳定性。
注意:在绘制系统零极点分布图时,可以适当变换坐标的显示范围,来达到增强零极点分布图可读性的效果。
实验内容:
一、用两种方法绘制如下系统函数的零极点分布图,并且判断系统是否稳定。
1、2
21
)(2++-=
s s s s H
方法一,程序代码:
零极图:
b=[1,-1]; a=[1 2 2]; zs=roots(b); ps=roots(a);
plot(real(zs),imag(zs), 'ro',real(ps),imag(ps),
'gx',…
'markersize',12); axis([-3,3,-2,2]); grid on; title('零极点图') xlabel('实部') ylabel('虚部')
-3
-2-1
0123
-2-1.5-1
-0.500.5
11.52零极点图
实部
虚部
方法二,程序代码: 零极图:
figure; b=[1,-1]; a=[1 2 2]; sys=tf(b,a); pzmap(sys); axis([-3,3,-2,2]);
2、1
222
3)(232+++++=s s s s s s H
方法一,程序代码:
零极图:
b=[1 3 2]; a=[1 2 2 1]; zs=roots(b);
ps=roots(a);
plot(real(zs),imag(zs),'o',real(ps),imag(ps), 'gx','markersize',12); axis([-2 0 -2 2]); grid on; title('零极点图') xlabel('实部') ylabel('虚部')
-2
-1.8-1.6-1.4-1.2
-1-0.8-0.6-0.4-0.20
-2-1.5-1-0.500.511.52零极点图
实部
虚部
方法二,程序代码: 零极图:
figure; b=[1 3 2]; a=[1 2 2 1]; sys=tf(b,a); pzmap(sys) axis([-2 0 -2 2]);
3、22)(2++=s s s H 方法一,程序代码:
零极图:
b=[1 2 2]; zs=roots(b);
plot(real(zs),imag(zs),'o','markersize',12);
axis([-2 0 -2 2]); grid on; title('零极点图') xlabel('实部') ylabel('虚部') -2
-1.8-1.6-1.4-1.2
-1-0.8-0.6-0.4-0.20
-2-1.5-1-0.500.5
11.52零极点图
实部
虚部
方法二,程序代码: 零极图:
figure; b=[1 2 2]; a=[1];
sys=tf(b,a); pzmap(sys); axis([-2 0 -2 2]);
二、已知系统函数为32
1
()221
H s s s s =
+++,画出该系统的零极点分布图,分析系统的稳定性,并画出该系统的冲激响应和幅频响应。
程序代码:
输出曲线图:
三、已知系统函数为2
1
()21
H s s as =
++,画出2,1,0,1,2a =--时该系统的零极点分布图。
如果系统稳定时,画出响应系统的幅频响应,并分析系统极点位置对系
统的幅频特性有何影响。
零极图,程序代码:零极图:
for a=-2:2
num=[1];
den=[1 2*a 1];
sys=tf(num,den);
subplot(3,2,a+3);
pzmap(sys);
end
幅频响应,程序代码:响应图:figure;
for a=0:2
num=[1];
den=[1 2*a 1];
[H,w]=freqs(num,den);
subplot(3,1,a+1);
plot(w,abs(H));
xlabel(‘w’)
ylabel(‘|H(jw)|’)
title(‘幅频特性')
end
012345678910 0
100
200
w
|
H
(
j
w
)
|
幅频特性
012345678910 0
0.5
1
w
|
H
(
j
w
)
|
幅频特性
0102030405060708090100 0
0.5
1
w
|
H
(
j
w
)
|
幅频特性
-3
-2-1
0123
-2-1.5-1-0.500.511.52零极点图
实部
虚部
-2
-1.8-1.6-1.4-1.2
-1-0.8-0.6-0.4-0.20
-2-1.5-1-0.500.5
11.52零极点图
实部
虚部
-2
-1.8-1.6-1.4-1.2
-1-0.8-0.6-0.4-0.20
-2-1.5-1-0.500.5
11.52零极点图
实部
虚部
-1
-0.9-0.8-0.7-0.6-0.5-0.4-0.3-0.2-0.10
-101Pol e -Zero Map
Real Axi s
I m a g i n a r y A x i s
1
2
3
4
5
6
7
-0.500.5
t h (t )
冲激响应
1
2
3
4
56
7
8
9
10
00.51
w
|H (j w )|
幅频特性
1
2
3
4567
8
9
10
w |H (j w )|
幅频特性
1
2
3
4567
8
9
10
w |H (j w )|
幅频特性
10
20
30
40
5060
70
80
90
100
w
|H (j w )|
幅频特性。