Rslogix5000 software 软件编程实例
- 格式:doc
- 大小:208.50 KB
- 文档页数:9
Lab 3. RSLogix5000软件编程实例实验主题:创建项目(具体步骤参见实验一和实验二)z创建RSLogix5000工程z配置模块z建立任务z建立程序和例程z建立TAG指令应用z位指令— XIC、XIO、OTE、OTL、OTU、ONS等z计时器和计数器— TON、TOF、CTU、CTD、RES等z输入输出指令-MSG等z比较指令— CMP、LIM、EQU、LES、GRT等z数据传送指令— MOV、MVM、COP等z函数计算指令— CPT、ADD、SUB、MUL、DIV、CLR等(注意溢出等问题)z程序控制指令— JMP、JSR、RET等z PID指令——张力控制(手动自动调节、KP、KI的设定、跟踪)Tag名的定义及程序设计方法:怎样优化程序,提高程序的可读性z Tag命名的规范和标准z程序命名的规范z压缩程序,同一功能用统一程序z减少跳转如何编写大规模、复杂的程序z做好编程准备工作,了解程序的需求性z理清思路,做好功能分块z从单个设备开始,从最基本的逻辑开始z保证单动正确,然后加上连锁z安全第一,模拟运行如何保证安全z MCC测试位置运行z软件I/O强制z停止第一z必须有手动功能程序的修改z尽量避免下载程序,大规模在线修改技巧RSLogix5000指令应用实例:一、位指令XIC(检查是否闭合)和XIO(检查是否断开)是输入指令,OTE(输出激励)、OTL(输出锁存)和OTU(输出解锁)是输出指令。
位指令要求操作数的数据类型都必须是BOOL。
应用程序如下图所示(编程方法参见实验二):当控制器处于运行或者远程运行状态时,可以在标记数据库的Monitor(监视)页面中或者通过右键菜单改变某一个中间变量(非I/O点,指由用户自己定义的标签)的值。
点击这里当输入条件发生变化时,测试输出结果如下所示:①如果Limit_switch_1=1 并且Limit_switch_2=0,则Light_1灯亮;如果Limit_switch_3=1,则Light_2灯亮,并且锁存该状态,即使下一轮程序扫描到Limit_switch_3=0,Light_2灯依然点亮,如测试结果②中的梯级1的输出状态所示。
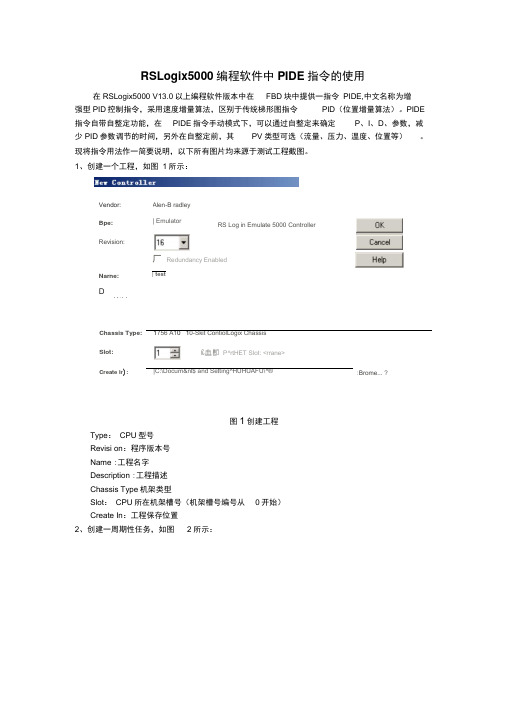
RSLogix5000编程软件中PIDE 指令的使用在RSLogix5000 V13.0以上编程软件版本中在FBD 块中提供一指令 PIDE,中文名称为增强型PID 控制指令,采用速度增量算法,区别于传统梯形图指令 PID (位置增量算法)。
PIDE指令自带自整定功能,在 PIDE 指令手动模式下,可以通过自整定来确定P 、I 、D 、参数,减少PID 参数调节的时间,另外在自整定前,其PV 类型可选(流量、压力、温度、位置等)。
现将指令用法作一简要说明,以下所有图片均来源于测试工程截图。
1、创建一个工程,如图 1所示:1756 A10 10-Skit ContiolLogix Chassis£血卽 P^rtHET Slot: <rrane>|C:\Docum&nl$ and Setting^HUHUAFU\^®图1创建工程Type : CPU 型号 Revisi on :程序版本号 Name :工程名字 Description :工程描述 Chassis Type 机架类型Slot : CPU 所在机架槽号(机架槽号编号从 0开始) Create In :工程保存位置 2、创建一周期性任务,如图2所示:Bpe: Revision:Narne:Descri^tkin:RS Log in Emulate 5000 Controller厂 Redundancy Enabled| testChassis Type: Slot:Create lr )::Brome... ?Vendor: Alen-B radley | Emulator!曲 Vi«r~D«fiatd'Add a Osi &DefinedK ,凰.Fred* fined Rodul«-Defined匚]TrendsB t3 I/O Confi gur uti白图2:创建周期性任务Name :周期性任务名称 Description :周期性任务描述 Type:任务类型(周期性/时间) Period :任务周期时间Priority :优先级(数值越小,优先级越高) Watchdog :看门狗时间(任务周期时间的 3、创建程序组,如图 3所示:日 *^3 T&s-ks,S ^H.ihTt«k 圈-—I ItiiLFrc^amCJ UnK>E.臼 M 讥 □恤 O Add-Oh X E 己:屉Qw fl 0SI 毘血 鼻購...二 Trmdr 匕 Q I/OtenCut Ctrl«Copy Clrl+C p 11CIrl+VuaCr«£5 Ref^rtnce Ctrl+E Froperii ex. Mt*EBterKr* EquipBi«nt Phtit ,- Jd:-:0 IT5& tvrkplu^. IT 胃f ;暂[1] Emuliter ttilCtrl+I17565*] [L ] Emul&tor test2~3 倍)C ZIAdd-On图3 :创建程序组Name :程序组名称Description :程序组描述Schedule in :程序组所在任务4、创建程序段■ew R ATL I ine2dOpen Routine图4 :创建程序段Name :程序段名称 Description :程序段描述Type :程序段类型(梯形图、功能块等) In Program or Phase :程序段所在程序组 5、打开程序段,添加 PIDE 指令,如图5所示:图5:添加PIDE 指令PIDE_01:指令名称,添加指令时自动生产,可更改 Autotune Tag :自整定标签Name:description:Type :Function Block Didgr^m HelpIn Progiamor Phase :|l Itest~^|FIDEJEnhanced] PI DC PV CVEUc SP ProgSP 匸 SP Cascadia PVHHAJarm 匚 RatioProgPVHAJarm c CVProg PVLAJarm cFFPVLLJy arm 匚 H andFBPVROCPosAlarm 叵 P ro g P ro g R e qPVROCNegAlarm (E ProgOp erReq D evH HUM a rm E ProgC asR ai:R <e q De vHAla rnru EP ro gAuto ReqDe vl_Ala rnruE : P ro g M a rnu m 1R EqDevLLAIarm 叵 Prog Ove rride ReqPro gOp er 叵 ProgHandReqiCasRatAuitoOverrideHandAutotun eTagFIDE 013 33 3 33Zi n□JO□□ JO □6、修改PIDE 指令参数,使之符合使用要求,如图6所示:剖宙 1 创 D| 01 #|[□il C IMI £I cuar<-tic (n.-EITx/Lini tx Cue 0■KldrTiM| WE 虫*Fn^urit 七呂 冥 Adcl-Ori 入 PijFroperlies - FIDE_T1STPIDE. JESTPIDEJEn>biwd PIDPVcveu'SP PragSP €PCiirojii& PUHHAJjrniRjtoProgPVH^Arni CVProgFVLAJjiniFF PVLLWIjjniHaMFBFVRDCFtkSAJJIfflFroflP^flPeqPVROCFiegAliaim Pr&flOp&iftaqPr&flCasRatReq Os-vMAjarm ProflAutc»R»q DyvUMdnrn ProgMi nujIRaqi DcvLLAI jrm PrDgOveirid«R«q Prci^Qp trPrDgH jndReqCasfiat Auto OveftdeAutfl1un«Tao P!&E AUTOT1JNlEC 匚 I : d Et)JO 3D.0D ©□13 □%30:LD 0 D D□ 0□㈱VU J ? TppeDescrtipiion*1r EndHWn1 BOOLEnisfcte lei. If Fake 仁.」 1 F FVQO R EAL Scdted piocess vaiiable.. 1r fWaUt0 BOOL PV bad health indicate.... 1 r FVEUM®10QD R EAL Mawmum scalsdl vabs L. 1 r PVEUMm0.D R EALMinirracrn scaled value la... 1 [7 SPPtogan R EALSP Program value.轮aL 1 r SPOper 0.0REAL SP 0per-Stor value, seal... 1 眉 SPCascade0.0 REAL SP Cagcade value, .1 rSPHLirrii 1Q0.Q REALSP high limit value, sc^l...1 r "SPLlimlao R EMSP low Imii value. $cate 1 匚0 BOOLAlow Ratoconirol pern.. 1RaticFifoaREALRatio Progiwn muliiplie 畀…1匚FiatioOtKf1.0REAL RaNio Opeidlor muRipier ....二|Jnseit InsUuctiTi DefajftiInsert Factaiy DiafauftE ISave instruaion Dif $Executio>ib Order1T___ l.亠—•■Xivtr displ 矽 iptii 恤 in 4帮肋图6: PIDE 参数设置个人推荐使用的参数: En able In :指令使能PV :过程反馈变量,标度变换之后 PVEUMax : PV 上限,标度变换之后 PVEUMin : PV 下限,标度变换之后 SPCascade SP 远控设定值 SPHLimit: SP 设定值上限 SPLLimi : SP 设定值下限CVInitReq : CVEU 初始设定请求(1有效) CVInitValue : CVEU 初始设定值CVInitReq 和CVInitValue 实现PIDE 无冲击启动,相当于 PID 指令中的INHOLD 和INHOLD VALUECVProg: CV 手动输出值CVEUMax : CVEU 上限,最大值对应 100%CV CVEUMin : CVEU 下限,最小值对应 0%CV CVHLimit : CV 上限 CVLLimit: CV 下限 PGain : P 参数 IGain : I 参数 DGain : D 参数 AllowCasRat :远控允许ProgProgReq :编程编程请求,手动到自动或者自动到手动切换时,需要置位此位ProgCasRatReq 编程远控请求,编程到远控切换位 ProgManualReq :编程手动请求,编程到手动切换位 En ableOut :使能输出CVEU: CVEU 输出,最大值对应100%CV,最小值对应0%CV,远控/初始化请求有效模式 下,CVEU 作为PIDE 调节的控制变量,相当于 PID 指令的CVCV: CV 输出,手动模式下,作为 PIDE 调节的控制变量,相当于 PID 指令的CV SP 设定值,只显示 CasRat 远控模式显示 Manual :手动模式显示以上参数设定完毕后, PIDE 指令如图7所示:图7:调整参数后的 PIDE 指令由于PIDE 指令标签为结构体,因此需要更改的变量如 CV 上下限,P 、I 、D 参数可通过梯形图对其赋值。


RSLogix5000I/ORSLogix5000122.1 RSLogix50002.1.1创建任务、程序和例程2-1图2-1工艺流程图1 P12 P22-2 /PartSensor 0 1 1 2 3 P1 2-3PartSensor3图2-2各个按钮和指示灯的含义P1 P1 ControlLogixPress StationActivePartSensorStake StationActiveWeld StationActive Part_Sensor_Fault_IndicatorConveyorOutput(P1)StationActive StationActive PartPASSEDPartFAULTConveyorOutput(P2)4图2-3时序图1.RSLogix5000 2-4图2-4RSLogix5000启动界面2. File->New New Controller 0 ControlLogix Demo Logix5555 RSLinx RSWho Logix5555 2-5NewPartSensorPress StationActiveStake StationActiveWeld StationActiveConveyorOutput(P1)图2-5新建控制器对话框OK 2-6图2-6新建项目资源管理器ControlLogix I/O Logix55553. P156P1 2-1表2-1控制器P1项目组织… … … …AssemblyProgram_1_Press Routine_Dispatch Station_1_Press Program_2_StakeRoutine_Dispatch Station_2_StakeProgram_3_WeldRoutine_Dispatch Station_3_Weld ConveyorConveyor Conveyor Periodic_DispatcherStation_DispatcherStation_DispatcherP11,2,3 -- 500ms ---- 500ms-- -- 50ms-- 400ms-- -- 50ms4.Logix Continuous Periodic Event P1 P1 2-2表2-2控制器P1中各任务的属性7Task TypeWatchdog ()Assembly ContinuousPeriodicConveyor ContinuousPeriodicPeriodic_DispatcherContinuous Periodic5.LogixRSLogix5000 MainTask 2-6 MainTask Properties MainTask Assembly6. File->New component->Task Tasks New Task… Conveyor 2-7 50ms Periodic Periodic_Dispatcher8图2-7创建新任务Conveyor7. Assembly Assembly New Program Program_1_Press 2-8 Program_2_Stake Program_3_Weld图2-8创建新程序8. Assembly Assembly Properties Program Schedule 2-9图2-9规划程序9. Assembly Program_1_Press Program_1_Press New9Routine_Dispatch Ladder Diagram Program_1_Press 2-10图2-10创建例程Station_1_Press Ladder Diagram Program_1_Press10. Assembly Program_1_Press Program_1_Press Properties Configuration Assigned Main Routine_Dispatch 2-11图2-11指定主例程11. Program_2_Stake Program_3_Weld12. Conveyor Periodic_Dispatcher 2-12 ----10图2-12新建任务、程序和例程13. File->Save2.1.2创建标签、结构体和数组Logix I/O /1. 2. 1.RSLogix50002. File->Open P13. Controller Tags New Tag… Tag Name P&ID11Tag NamePLC Tag NameCall_Program_Value INT Base P1 Controller Decimal 2-13图2-13新建标签4. 2-14图2-14控制器域标签5. Conveyor 2-1512图2-15Conveyor 程序域内标签6. Station_Dispatcher 2-16图2-16Station_Dispatcher 程序域内标签7. Program_1_Press 2-17图2-17Program_1_Press 程序域内标签8. Program_1_Press Ctrl+C Ctrl+V Program_2_Stake Program_3_Weld Logix9. P1 Product ID Part_ID Serial_No Catalog_No2-18 Data Type User-Defined New Data Type…图2-18新建用户自定义数据类型10. Name Members 2-19图2-19自定义数据类型中名称和成员11. Controller Scope Product_ID Station_Data2-20图2-20创建数据类型为Product_ID的标签12.13142.1.3编写梯形图程序RSLogix50001.2.3.4.5.6.1. RSLogix50002. File->Open P13. Assembly->Program_1_Press->Routine_Dispatch Open 2-21图2-21打开Routine_Dispatch 例程4. 2-2215图2-22Routine_Dispatch 编程窗口Edit e5.Routine_Dispatch Station_1_Press StationTimer Call_Program_Value Station_Dispatcher 1 Station_1_PressEQU Compare EQU 2-23图2-23EQU 指令位置e EQU Insert EQUEQU 2-24图2-24输入EQU 指令166. EQU SourceA SourceB 2-25图2-25设置EQU 指令参数Controller Scoped Tags Program Scoped Tags Call_Program_Value Controller Scoped TagsProgram Scoped Tags Program Routine /7. SourceB 1 Source B 2-26图2-26设置Source B 参数8. 2-27 117图2-27新建标签对话框9. Assembly->Program_1_Press->Routine_Dispatch 2-28 ONS RES Insert Help->Instruction Help图2-28创建梯形图逻辑10. Routine_Dispatch Station_1_Press Station_1_PressEQU Branch 2-29图2-29选择分支Branch 2-3018图2-30创建分支JSR Insert Help->Instruction Help 2-31图2-31查阅指令帮助11. Assembly->Program_1_Press->Routine_Dispatch 2-32图2-32创建完的Routine_Dispatch 例程12. Assembly->Program_1_Press->Routine_Dispatch Assembly->Program_2_Stake->Routine_Dispatch13. Assembly->Program_2_Stake->Routine_Dispatch 2-33图2-33参数修改EQU SourceB 2JSR Routine Name Station_2_StakeBranch21914. Assembly->Program_1_Press->Routine_Dispatch Assembly->Program_3_Weld->Routine_Dispatch 2-34EQU SourceB 3JSR Routine Name Station_3_Weld图2-34参数修改Copy+Paste Copy+Paste15.16. Assembly->Program_1_Press->Station_1_Press 2-35图2-35Station_1_Press 梯形图17. Assembly->Program_1_Press->Station_1_Press Assembly->Program_2_Stake->Station_2_StakeStationTimer Preset 2000Shift 2-36图2-36参数修改2018. Assembly->Program_1_Press->Station_1_Press Assembly->Program_3_Weld->Station_3_WeldStationTimer Preset 3000StationTimer Complete Conveyor2-37图2-37参数修改19.20.21. Program_1_Press Copy+Paste Program_1_Press22. Conveyor Conveyor->Conveyor->Conveyor 2-38图2-38Conveyor 例程中梯形图0 1 22123. Periodic_Dispatcher->Station_Dispatcher->Station _Dispatcher 2-39图2-39Station _Dispatcher 例程的梯形图0 1 3 42224.I/O25. File->Save 2-40图2-40保存文件26. Trends New Trend 2-41图2-41新建趋势图27. Compressor OK 2-42图2-42趋势图命名2328. Add/Configure Tags / Scope Controller Available Tags Add Tags to Trend Tags to Trend Remove 2-43图2-43添加/组态标签对话框29. Chart Properties Display Background color X-Axis X 2-44图2-44设置时间轴参数2430. Y-Axis Y 2-45 OK图2-45设置Y 轴参数31. Trends 2-46图2-46创建的趋势图32. Logix5555 Remote25Communications->Who Active 2-47图2-47通讯路径设置图2-48浏览控制器33. Download Remote Run 2-49图2-49警告对话框34. Download 2-5026图2-50下载进程35. Online Run Mode 2-51图2-51运行模式36. Compressor Run37. PartSensor Station_Dispatcher 2 PartSensor 2-52图2-52程序窗口38. Trends->Compress 2-5327图2-53时序图2.1.4I/O 组态I/O I/OI/OI/OI/OI/O1. I/O 2-63 P1 I/O PartSenorPressStationActive PartSensor StakeStationActive PartSensor_Fault_Indicator StationActive StationActive PartPASSEDPartFAULT图2-54按钮和指示灯2. ControlLogix Demo ControlLogix Demo RSLinx->RSWho 2-55图2-55查看ControlLogix机架配置0 1756-OB16D 21756-IB16D28293. I/O 2-3 P1 I/O表2-3I/O 地址规划作用域标签名称I/O 地址P1 ControllerConveyorOutput Local:0:O.Data.5PartSensor Local:2:I.Data.1Program_1_PressStationActive Local:0:O.Data.0Program_2_StakeStationActive Local:0:O.Data.1Program_3_WeldStationActive Local:0:O.Data.2Conveyor Part_Sensor_Fault_Indicator Local:0:O.Data.44.RSLogix5000 2-56图2-56RSLogix5000启动界面5. File->Open P1.ACD6. I/O 1756-OB16D I/O Configuration I/O New Module 2-57图2-57添加新模块7. 1756-OB16D OK30图2-58选择模块类型8. 0 2-59图2-60设置模块属性Electronic Keying OnlineCompatible Module - Module Types (Catalog Number) (Major Revision) (Minor Revision) RSLogix5000Disable Keying -RSLogix5000Exact Match- RSLogix 5000Vendor,Product Type,Catalog Number,Major Revision,Minor Revision319. Next 2-61 Next图2-61模块属性缺省值10. 2-62 0 1756-OB16D图2-62I/O11. I/O Configuration New Module12. 1756-IB16D OK13. 2-63图2-63添加模块参数设置3214. NextI/O Configuration I/O 2-64图2-64完成I/O 组态15. I/O Controller Tags Monitor Tags 2-65图2-65模块自动生成的预定义标签16. 2-65 I/O /Location:SlotNumber:Type.MemberName.SubMemberName.Bit ( ): : . . .Local:2:I.Data.0-- :2: . . 017. I/O 3 I/O Alias tag I/O18. I/O ControllerTags( ) Edit Tags 2-66图2-66选择编辑标签2-67I/O图2-67编辑标签ConveyorOutput PartSensor I/O Alias For I/O I/O I/O ConveyorOut Alias For2-685 5 Alias For Local:0:O.Data.533342-69图2-69建立地址映射关系3 I/O I/O 2-70图2-70建立所有的地址映射19.20. 2-71图2-71保存文件21. Communications->Who Active 2-72图2-72选择Who Active22. I/O23.PartSensor 1756-IB16DRSLogix5000 I/O2.2RSLogix50002.2.1创建ControlLogix功能块图程序RSLogix5000 DCS120% ——RSLogix5000(P&ID) ControlLogix 6 Local:6:I.Ch0Data Local:6:I.Ch1Data3536DCSLocal:6:I.Ch0Data DeviceNet —— Local:6:I.Ch1Data6.75 3.29120% Local:7:O.Ch1Data([(Local:6:I.Ch0Data)+(Local:6:I.Ch1Data)]*0.5)*1.20.5*1.2=0.6 0.6ControlLogixIREF OREF ADD MULJSR1. RSLogix50002. File->New New Controller 2-73 Controller Type Revision OK37图2-73新建控制器对话框3. MainProgram New Routine 2-74图2-74新建例程2-75 Name Description Type 2-75 Function Block Diagram In Program Main Program图2-75新建例程对话框RSLogix5000 Ladder Diagrams Function Block Diagrams Sequential Fuction Chart Structured Text4. Function Block Diagram Function38Block Diagram OK5. MainProgram Routine 2-84 Stage3_Speed图2-84新建功能块例程I/O (connector)I/O IREF input reference OREF output reference ControlLogix ICON input connection OCON output connectionIREF I/O 2-76图2-76功能块编程界面6.2-77图2-77浏览不同的功能块397.2-87图2-87输入参考功能块RSLogix5000 I/O IREF Input ReferenceOREF (Output Reference) ICON (Input Connector) OCON (Output Connector) ICON OCONIREF OREF ICON OCONVI1( Local:6:I.Ch0Data) VI2( Local:6:I.Ch1Data) IREF 0.6(0.5*120%=0.6) ADD MUL OREF VO( Local:7:O.Ch1Data)8. VI1 VI2 VO MaiProgram Scope Program Tags, New Tag 2-88图2-88选择新建标签2-89图2-89新建标签40 OK VI1 VI2 VO MainProgram 2-90图2-90MainProgram 程序域中的标签9. IREFIREF IREF IREF 2-91图2-91新建IREF 块IREF IREF Program Scoped Tags VI1 2-92图2-92为两个IREF 功能块输入标签益置状环 益置状环益置状环 益置状环41I/O 2-93图2-93输入I/O 地址后的IREF 功能块10. IREF VI2 2-94图2-94两个输入I/O 地址后的IREF 功能块11. 0.612.2-95图2-95选择ADD13. MUL 2-96 ADD MUL图2-96新建ADD 和MUL 功能块42IREF ADD MUL——14. 2-9615. 2-97Windows NT图2-97完成的表格ControlLogix Demo AO1 Local:7:O.Ch1Data Program Scope VO Alias for VO Local:7:O.Ch1Data16. OREF(Output Reference) 2-98图2-98新建OREF 功能块17. OREF MUL Program Scope VO 2-99图2-99给OREF 输入标签18. IREF ADD Source A 2-100File->Save图2-100连接端口VI1 ADD Source A 2-101图2-101连接功能块19.MUL SourceB 0.6 120%0.6 IREF MUL Source B0.6MUL20. MUL MUL4344( ), 2-102图2-102MUL 属性框21. Apply TagVis ADD 0.6 Source BSource B Vis 0.6 Apply Tag22. Description 2-103 0.6 OK图2-103输入描述内容Program Scoped Tags 0.6 Program Scoped Tags MUL_01.SourceB0.645MUL 2-104图2-104完成后的MUL 功能块23 2-105图2-105错误提示3Error:Rung 0:Empty rung.F4 MainTask->Main Program->MainRoutine 2-106图2-106跳转到错误梯级46Stage3_Speed24 MainProgram Properties 2-107图2-107选择Properties 选项2-108图2-108属性界面47Configuration Assigned Routines->Main Stage3_Speed MainRoutine Apply OK 2-109图2-109指定例程2-110 Stage3_Speed MainRoutine Program Tags图2-110指定Stage3_Speed 为主例程后的显示界面25 Stage3_Speed MainRoutine MainRoutine Delete MainRoutine 2-111图2-111删除原有的梯形图例程MainRoutineMainProgram4826 Stage3_Speed MainRoutine I/O I/O27 I/O ControlLogix Demo 1756-IF6I 6 1756-OF6VI 7 I/O Configuration I/O New Module 2-112图2-112选择添加新模块Select Module Type 2-113图2-113选择模块类型对话框1756-IF6I 1756-IF6I 2-113 OK 2-114图2-1141756-IF6I 模块对话框28 Next Next 2-11549图2-115接受缺省设置29 Finish7 2-116 RSLogix5000 I/O图2-116添加好的1756-IF6I 模块30 1756-OF6VI 7 2-117图2-1171756-OF6VI的属性设置5031 I/O 2-118图2-118完成的I/O 组态32 2-119图2-119自动生成的结构体33. / I/O 1756-IF6IControlLogix Demo 1756-IF6I 0 AI0 1756-IF6I 1 AI1 1756-OF6VI 0 AO034 I/O 2-4表2-4标签与I/O 地址映射关系作用域标签名称I/O 地址MainProgram VI1Local:6:I.Ch0Data VI2Local:6:I.Ch1Data VO Local:7:O.Ch0Data35 Alias for I/O VI1 Local:6:I.Ch0Data Program Tags( ) Edit Tags 2-120。
Lab 3. RSLogix5000软件编程实例实验主题:创建项目(具体步骤参见实验一和实验二)z创建RSLogix5000工程z配置模块z建立任务z建立程序和例程z建立TAG指令应用z位指令— XIC、XIO、OTE、OTL、OTU、ONS等z计时器和计数器— TON、TOF、CTU、CTD、RES等z输入输出指令-MSG等z比较指令— CMP、LIM、EQU、LES、GRT等z数据传送指令— MOV、MVM、COP等z函数计算指令— CPT、ADD、SUB、MUL、DIV、CLR等(注意溢出等问题)z程序控制指令— JMP、JSR、RET等z PID指令——张力控制(手动自动调节、KP、KI的设定、跟踪)Tag名的定义及程序设计方法:怎样优化程序,提高程序的可读性z Tag命名的规范和标准z程序命名的规范z压缩程序,同一功能用统一程序z减少跳转如何编写大规模、复杂的程序z做好编程准备工作,了解程序的需求性z理清思路,做好功能分块z从单个设备开始,从最基本的逻辑开始z保证单动正确,然后加上连锁z安全第一,模拟运行如何保证安全z MCC测试位置运行z软件I/O强制z停止第一z必须有手动功能程序的修改z尽量避免下载程序,大规模在线修改技巧RSLogix5000指令应用实例:一、位指令XIC(检查是否闭合)和XIO(检查是否断开)是输入指令,OTE(输出激励)、OTL(输出锁存)和OTU(输出解锁)是输出指令。
位指令要求操作数的数据类型都必须是BOOL。
应用程序如下图所示(编程方法参见实验二):当控制器处于运行或者远程运行状态时,可以在标记数据库的Monitor(监视)页面中或者通过右键菜单改变某一个中间变量(非I/O点,指由用户自己定义的标签)的值。
点击这里当输入条件发生变化时,测试输出结果如下所示:①如果Limit_switch_1=1 并且Limit_switch_2=0,则Light_1灯亮;如果Limit_switch_3=1,则Light_2灯亮,并且锁存该状态,即使下一轮程序扫描到Limit_switch_3=0,Light_2灯依然点亮,如测试结果②中的梯级1的输出状态所示。
Lab 1. 熟悉硬件所有模块都放在桌面上Be familiar with Hardware Objective Benefit-Identify Lab components -chassis design Robust, easy installation, without tools -Power up Demo-Insert ENBTs/CNBs -RIUP/Easyinstallation-Connect to Enternet -Communicate independency of CPU -Off load cpu/High performance-Configure RsLinx/RsWho Remote configuration and browsing -Insert I/O modules slotindependency-Browse remote chassis I/O Flexibility in system upgrade-Insert CPU All RIUP, Easier installation (Without HYD02,SRM )-Monitor I/O module status Easy to diagnose/ maintain主要议题:•认识各模块• RIUP•通讯建立请按步骤:1) 请查看各模块的外形,通讯模块,I/O模块,运动控制模块,处理器模块框架式设计可靠,安装容易,无需工具。
端子可取下,接线方便,更换快速。
2) 上电3) 插入ENBT/ENET, CNB 模块, 连接以太网线体会带电热插拔。
安装方便。
4) 打开RSLinx,点击或5) 在工具条上点击选择Ethernet Devices, 按下 Add New 键单击 OK.6) 增加以太网设备单击OK.注意:IP 地址按指导。
192.168.1.11----14 for ENBT 192.168.1.15 for PanelView Plus 7) 单击 Close8) 检查计算机的IP设定。
Lab 2. 软件编程主要议题:•强大的编程能力•面向未来的投资•Start Lab 2Open Rslogix5000 software Objective Benefit-Create new projectUniform programenviorment for logixplatform,save engineering training cost-FirmwareField upgradableOS/InstructionEquipment Upgrade with morenew function, Protect Investment-Simple project programmingQuick and easyprograImprove your competitive ability-Timer/Download/Upload/IO -Trending, timer-Alias program --- I/ OParrellel Programming /reduce development time请按步骤:1) 点击。
2) 新建工程。
3) 设置参数如下。
Revision: Logix 平台,提供了固件升级手段,保护你的投资,真正面向未来的控制平台。
Type:你可选择基于Logix 平台的多种处理器。
确定你的CPU 在第三槽位。
实际上CPU 不受槽位限制。
4) 点击OK。
5)树形工程管理5) 右键点击 I/O configuration。
选择 New Module。
单击OK.Next.NextNextNextNextFinish.6)右键点击, Controller Tags. 。
你会发现,系统自动为你生成了该模块数据。
所有的模块信息都在你的掌握中,任你支配。
7)开始你的第一个程序。
点击MainRoutine。
8)自己做个简单程序如下。
9)下载程序,先选择 Who Active。
Lab 2. 软件编程
主要议题:
∙强大的编程能力
∙面向未来的投资
请按步骤:
1) 点击。
2) 新建工程。
3) 设置参数如下。
Revision: Logix 平台,提供了固件升级手段,保护你的投资,真正面向未来的控制平台。
Type:你可选择基于Logix 平台的多种处理器。
确定你的CPU 在第三槽位。
实际上CPU 不受槽位限制。
4) 点击OK。
5)树形工程管理
5) 右键点击 I/O configuration。
选择 New Module。
单击OK.
Next.
Next
Next
Next
Next
Finish.
6)右键点击, Controller Tags. 。
你会发现,
系统自动为你生成了该模块数据。
所有的模块信息都在你的掌握中,任你支配。
7)开始你的第一个程序。
点击MainRoutine。
8)自己做个简单程序如下。
9)下载程序,先选择 Who Active。
10)选择下载路径如下。
10)你可利用Trends 看到下图。
总结:
1. 共同的Logix 编程平台
2. 面向未来投资的,固件升级。
3. 并行编程,减少工程实施时间。
4. 别名,趋势图方便系统调试。