第一章齐次变换
- 格式:ppt
- 大小:368.00 KB
- 文档页数:12
工业机器人技术与应用知到章节测试答案智慧树2023年最新西安工业大学第一章测试1.约瑟夫·英格伯格最早提出了工业机器人的概念,并且申请了专利。
参考答案:错2.被誉为“工业机器人之父”的约瑟夫·英格伯格最早提出了工业机器人概念。
()参考答案:错3.工业机器人的机械结构系统由基座、手臂、手腕、末端操作器 4 大件组成。
()参考答案:错4.示教盒属于机器人 - 环境交互系统。
()参考答案:错5.最早提出工业机器人概念,并申请了专利的是戴沃尔。
()参考答案:对6.我国于1972年开始研制自己的工业机器人。
()参考答案:对7.工业机器人的坐标形式有直角坐标型、圆柱坐标型、关节坐标型、球坐标型、和平面关节型。
()参考答案:对8.机械手是机器人()参考答案:对9.机器人是一种能自动控制、可重复编程、多功能,可以代替人完成特定任务的一种自动化机电装置。
()参考答案:对10.机器人按用途分类,分为搬运、焊接、装配、喷漆、检查等机器人。
()参考答案:对第二章测试1.齐次变换在机器人运动学和动力学分析中广为应用。
()参考答案:对2.以机器人关节建立坐标系,可用齐次变换来描述这些坐标系之间的相对位置和姿态方向。
()参考答案:对3.齐次坐标 [0 0 1 0]T表示的内容是Z方向。
()参考答案:对4.齐次坐标 [0 1 0 0]T表示的内容是Y方向。
()参考答案:对5.齐次坐标 [1 0 0 0]T表示的内容是X方向。
()参考答案:对6.机器人三原则是由阿西莫夫提出的。
()参考答案:对7.日本曾经赢得了“机器人王国”的美称。
()参考答案:对8.坐标系位姿的描述就是用位姿矩阵对坐标系原点位置和坐标系各坐标轴方向的描述。
()参考答案:对9.机器人的每一个连杆均可视为一个刚体, 若给定了刚体上某一点的位置和该刚体在空中的姿态, 则这个刚体在空间上是唯一确定的, 可用唯一一个位姿矩阵进行描述。
()参考答案:对10.已知R为旋转矩阵,b为平移向量,下列相应的齐次矩阵。

第四讲 n 元线性方程组求解上一讲我们介绍了当n 元一次线性方程组的系数矩阵A 可逆时,可求出方程组解1X A b -=,实际上这也是方程组的唯一解。
如果方程组系数矩阵A 不可逆或A 不是方阵时,该如何来讨论方程组的解?这一讲将通过矩阵的初等变换来研究n 元一次线性方程组(齐次、非齐次)在什么条件下有解、如何求解以及各种解的表达形式等.n 元一次线性方程组是指形如⎪⎪⎩⎪⎪⎨⎧=+++=+++=+++mn mn m m n n n n b x a x a x a b x a x a x a b x a x a x a ΛΛΛΛΛΛΛΛΛΛΛΛΛΛΛ22112222212111212111 ... ...(4.1)令111212122212n n m m mn a a a a a a A a a a ⎛⎫⎪ ⎪= ⎪⎪⎝⎭L L L L L L L,12n x x X x ⎛⎫ ⎪ ⎪= ⎪ ⎪⎝⎭M ,12m b b b b ⎛⎫ ⎪ ⎪= ⎪ ⎪⎝⎭M则方程组的矩阵方程形式AX b =.其中:A 称为方程组(4.1)的系数矩阵,°()A A b =称为方程组(4.1)的增广矩阵。
当b O ≠时,称(4.1)式为一元线性非齐次线性方程组;当b O =时,称 (4.2 ) 式为一元线性齐次线性方程组,其矩阵形式AX O =.111122121122221122000n n n nm m mn n a x a x a x a x a x a x a x a x a x +++=⎧⎪+++=⎪⎨⎪⎪+++=⎩L L L L L L L L L L L L L L L ... ...(4.2) 显然X O =是(4.2)式的当然解。
所以说,齐次线性方程组的解只有两种情况:唯一解(零解)和无穷多解(非零解)。
把非齐次线性方程组(4.1)式的每个方程右边的常数项都换成0,所得到的齐次线性方程组称为原方程组的导出齐次线性方程组,简称导出组。
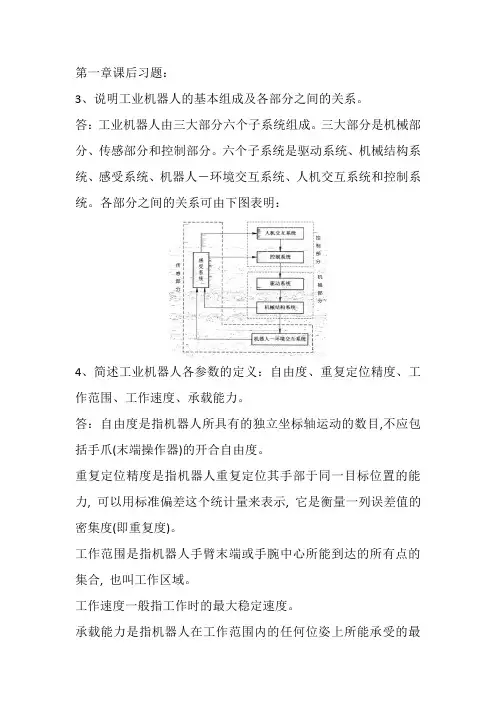
第一章课后习题:3、说明工业机器人的基本组成及各部分之间的关系。
答:工业机器人由三大部分六个子系统组成。
三大部分是机械部分、传感部分和控制部分。
六个子系统是驱动系统、机械结构系统、感受系统、机器人-环境交互系统、人机交互系统和控制系统。
各部分之间的关系可由下图表明:4、简述工业机器人各参数的定义:自由度、重复定位精度、工作范围、工作速度、承载能力。
答:自由度是指机器人所具有的独立坐标轴运动的数目,不应包括手爪(末端操作器)的开合自由度。
重复定位精度是指机器人重复定位其手部于同一目标位置的能力, 可以用标准偏差这个统计量来表示, 它是衡量一列误差值的密集度(即重复度)。
工作范围是指机器人手臂末端或手腕中心所能到达的所有点的集合, 也叫工作区域。
工作速度一般指工作时的最大稳定速度。
承载能力是指机器人在工作范围内的任何位姿上所能承受的最大质量。
承载能力不仅指负载, 而且还包括了机器人末端操作器的质量。
第二章课后习题:1、答:工业上的机器人的手一般称之为末端操作器, 它是机器人直接用于抓取和握紧(吸附)专用工具(如喷枪、扳手、焊具、喷头等)进行操作的部件。
具有模仿人手动作的功能, 并安装于机器人手臂的前端。
大致可分为以下几类: (1) 夹钳式取料手;(2) 吸附式取料手;(3) 专用操作器及转换器;(4) 仿生多指灵巧手。
4、答:R关节是一种翻转(Roll)关节。
B关节是一种折曲(Bend)关节。
Y关节是一种偏转(Yaw)关节。
具有俯仰、偏转和翻转运动, 即RPY运动。
5、答:行走机构分为固定轨迹式和无固定轨迹式。
无固定轨迹式又分为与地面连续接触(包括轮式和履带式)和与地面间断接触(步行式)。
轮式在平地上行驶比较方便,履带式可以在泥泞道路上和沙漠中行驶。
步行式有很大的适应性, 尤其在有障碍物的通道(如管道、台阶或楼梯)上或很难接近的工作场地更有优越性。
第三章课后习题:1、点矢量v 为]00.3000.2000.10[T ,相对参考系作如下齐次坐标变换:A=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--10000.9000.1000.0000.00.3000.0866.0500.00.11000.0500.0866.0 写出变换后点矢量v 的表达式,并说明是什么性质的变换,写出旋转算子Rot 及平移算子Trans 。
常微分方程第二版答案第一章【篇一:常微分方程第一章】程1.1学习目标:1. 理解微分方程有关的基本概念, 如微分方程、方程阶数、解、通解、初始条件、初值问题等的定义和提法. 掌握处理微分方程的三种主要方法: 解析方法, 定性方法和数值方法.2. 掌握变量分离法,用变量替换将某些方程转化为变量分离方程, 掌握一阶线性方程的猜测检验法, 常数变易法和积分因子法, 灵活运用这些方法求解相应方程, 理解和掌握一阶线性方程的通解结构和性质.3. 能够大致描述给定一阶微分方程的斜率场, 通过给定的斜率场描述方程解的定性性质; 理解和掌握欧拉方法, 能够利用欧拉方法做简单的近似计算.4. 理解和掌握一阶微分方程初值问题解的存在唯一性定理, 能够利用存在唯一性定理判别方程解的存在性与唯一性并解决与之相关的问题, 了解解对初值的连续相依性和解对初值的连续性定理, 理解适定性的概念.5. 理解自治方程平衡点, 平衡解, 相线的概念, 能够画出给定自治方程的相线, 判断平衡点类型进而定性分析满足不同初始条件解的渐近行为.6. 理解和掌握一阶单参数微分方程族的分歧概念, 掌握发生分歧的条件, 理解和掌握各种分歧类型和相应的分歧图解, 能够画出给定单参数微分方程族的分歧图解, 利用分歧图解分析解的渐近行为随参数变化的状况.7. 掌握在给定的假设条件下, 建立与实际问题相应的常微分方程模型, 并能够灵活运用本章知识进行模型的各种分析.1.2基本知识: (一) 基本概念1. 什么是微分方程:联系着自变量、未知函数及它们的导数(或微分)间的关系式(一般是指等式),称之为微分方程. 2. 常微分方程和偏微分方程:(1) 如果在微分方程中,自变量的个数只有一个,则称这种微分方程为常微分方程,dy2dyd2ydy()?t?y?0. ?b?cy?f(t)例如 , dtdtdtdt2(2) 如果在微分方程中,自变量的个数为两个或两个以上,则称这种微分方程为偏?2t?t?2t?2t?2t?4微分方程. 例如 , . ???02222?t?x?x?y?z本书在不特别指明的情况下, 所说的方程或微分方程均指常微分方程.3. 微分方程的阶数: 微分方程中出现的未知函数最高阶导数的阶数.例如,d2ydy?b?cy?f(t) 是二阶常微分方程; 2dtdt?2t?t?2t?2t?2t?4与是二阶偏微分方程. ???02222?t?x?x?y?z4. n阶常微分方程的一般形式:dydnyf(t,y,,...,n)?0,dtdtdydnydydnydnyn)是t,y,,...,n的已知函数,而且一定含有n的这里f(t,y,dtdtdtdtdt 项;y是未知函数,t是自变量. 5. 线性与非线性:dydnydydny,...,n)?0的左端是y及,...,n的一次有理式,(1)如果方程f(t,y,dtdtdtdtdydny,...,n)?0为n阶线性微分方程. 则称f(t,y,dtdt(2)一般n阶线性微分方程具有形式:dnydn?1ydy?a(t)?...?a(t)?an(t)y?f(t)1n?1nn?1dtdtdt这里a1(t),…, an(t),f(t)是t的已知函数.(3)不是线性方程的方程称为非线性方程. (4)举例:d2ydy?cy?f(t)是二阶线性微分方程;方程2?bdtdtd2?g方程2?sin??0是二阶非线性微分方程;ldt方程(dy2dy)?t?y?0是一阶非线性微分方程. dtdt6. 解和隐式解:dydny,...,n)?0后,能使它变为恒等式,则如果将函数y??(t)代入方程f(t,y,dtdt)?0决定的隐函数y??(t)是称函数y??(t)为方程的解. 如果关系式?(t,y方程的解,则称?(t,y)?0为方程的隐式解. 7. 通解与特解:把含有n个独立的任意常数c1,c2,...,cn的解 y??(t,c1,c2,...,cn)称为n阶方程dydnyf(t,y,,...,n)?0的通解. 其中解对常数的独立性是指,对?及其 n?1阶导数dtdtd?dn?1?,...,n?1关于n个常数 c1,c2,...,cn的雅可比行列式不为0, 即 dtdt ???c1????c1???(n?1)?c1???c2????c2???(n?1)?c2??????cn????cn??0.??(n?1)??cn为了确定微分方程一个特定的解,通常给出这个解所必须满足的条件,称为定解条件.dydny,...,n)?0的初始条件是常见的定解条件是初始条件, n阶微分方程f(t,y,dtdtdydn?1y(1)(n?1)?y0,...,n?1?y0指如下的n个条件:t?t0,y?y0,,这里dtdt(1)(n?1)是给定的n+1个常数. 求微分方程满足定解条件的解,就是所谓t0,y0,y0,...,y0定解问题. 当定解条件为初始条件时,相应的定解问题称为初值问题. 把满足初始条件的解称为微分方程的特解. 初始条件不同,对应的特解也不同.(二) 解析方法1.变量分离方程形如dy?f(t)?(y)的方程为变量分离方程,其中f(t),?(y)分别为t,y的连续函数.dt方程解法如下:若?(y)?0,则dy?f(t)dt?(y)dy??(y)??f(t)dt?c上式确定方程的隐式通解. 如果存在y0,使得??y0??0,则y?y0也是方程的解. 2. 可化为变量分离方程的方程(1) 齐次方程dyy?g()的方程为齐次方程,g?u?为u的连续函数. dttydydu?t?u,从而原方程变为解法如下:做变量替换u?,即y?ut,有tdtdtdudug(u)?ut?u?g(u),整理有?,此为变量分离方程,可求解. dtdtt形如 (2) 形如dya1t?b1y?c1的方程, 其中a1??a2,?b1,?b2,?c1,?c2为常数. ?dta2t?b2y?c2?a1b1c1???k的情形. a2b2c2此时方程化为dy?k,可解得y?kt?c. dt?a1a2b1b2?0,即a1b1??k的情形: a2b2ku?c1dudy?a2?b2?a2?b2dtdtu?c2令 u?a2t?b2y, 则有此为变量分离方程. ?a1b1a2b2?0的情形y. t对c1?c2?0的情况, 直接做变量替换u?当c1,c2不全为零, 求 ? ?a1t?b1y?c1?0的解为?a2t?b2y?c2?0?t??. ??y???t?t??令 ? , 则方程组化为y?y???原方程化为3.一阶线性微分方程?a1t?by1?0. ?at?by?0?22dya1t?byy??g()的齐次方程可求解. dta2t?byt(1) 一般形式:a(t)dydy?p(t)y?qt(的形式). dtp(t)dtdy,?c为任意常数. ?p(t)y,通解为ce?(2) 一阶齐次线性微分方程:dtdy?p(t)y?q(t),q(t)?0. (3) 一阶非齐次线性微分方程:dt性质1 必有零解 y?0;性质2 通解等于任意常数c与一个特解的乘积; 性质3 任意两个解的线性组合也是该微分方程的解. (5) 非齐次线性微分方程的性质性质1 没有零解;性质2 非齐次方程的解加上对应齐次方程的解仍为非齐次方程的解; 性质3 任意两个非齐次方程的解的差是相应齐次方程的解. (6) 一阶非齐次线性微分方程的解法:(i) 猜测-检验法对于常系数的情形,即 p(t) 为常数, 此时方程为(4) 齐次线性微分方程的性质dy?ay?q(t), a为常数. dt对应齐次方程的通解为ce, 只需再求一个特解, 这时根据q(t)为特定的函数,bt可猜测不同的形式特解. 事实上, 当q(t)?ae, a,b为给定常数, 且b?a 时at可设待定特解为ce, 而当b?a时, 可设特解形式为cte, 后代入方程可确定待定常数c. 当q(t)为cosat,??sinat或它们的线性组合时, 其中a为给定常数. 这时可设待定特解为bcosat?csinat代入方程后确定b,?c的值. 当btbtq(t)具有多项式形式a0tn?a1tn?1???an?1t?an, 其中a0,?a1,??an 为给定常数且a0?0, 这时可设待定特解为b0t?bt1nn?1???bn?1t?bn代入方程可求得bi,?i?0,1?,??,n的值. 对于q(t)有上述几种线性组合的形式, 则可设待定特解是上述形式特解的线性组合. (ii) 常数变易法: 令y?c(t)e?p(t)dt,代入方程,求出c(t)后可求得通解为【篇二:微分方程数值解法(戴嘉尊_第二版)习题讲解】答杨韧吴世良(编)成都信息工程学院数学学院二o一o年四月编写目录第一章常微分方程数值解 ......................................................................3 第二章抛物型方程的差分方法 ..............................................................8 第三章椭圆型方程的差分方法 ............................................................16 第四章双曲型方程的差分方法 (25)第一章常微分方程数值解1.解: 由欧拉公式得yn1 yn hf (xn, yn) yn h( 由梯形公式得 yn1 ynyn2 11 2 1x n2yn 2 ) yn 0.2yn20.1 1xn2h[ f (xn, yn)f (xn1, yn1)]1 2 1x n2 1h [(22yn 2 )(1x 11 2 1 2 h( 1xn 2 n12y 2 n1 )]1 1x 2n1yn hynhy 2 n1) )12 1 x n12hy n1 yn1 yn hyn2121 2 h( 1xn1 1x 2n1yn1欧拉公式计算结果xn114h(yn hyn2 2h12 1 2 h( 1xn))yn y(xn ) y(xn)yn0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10 0.1000 0.1970 0.2854 0.3609 0.4210 0.4656 0.4957 0.5137 0.5219 0.52270 0.0990 0.1923 0.2752 0.3448 0.4000 0.4412 0.4698 0.4878 0.4972 0.50000 0.0010 0.0047 0.0102 0.0160 0.0210 0.0244 0.0259 0.0259 0.0247 0.0227梯形公式计算结果xnyny(xn )y(xn)yn0 0 0 0【篇三:常微分方程习题】下列两个微分方程的公共解。

第一章计算机图形学概论1.计算机图形学研究的主要内容有哪些?研究图形图像的计算机生成、处理和显示2 .图形学中的图形特点是什么?图形图像有什么区别?图形主要是用矢量表示,图像则是由点阵表示3.计算机图形学发展的主要阶段包括哪些?字符显示->矢量显示->2D光栅显示->3D显示->新的计算机形式4.计算机图形学主要应用哪些方面?你对哪些领域比较熟悉?计算机辅助设计、可视化技术、虚拟现实、地理信息系统、计算机动画与艺术5.颜色模型分为面向用户和__面向设备__两种类型,分别是什么含义?颜色模型是一种在某种特定的上下文中对颜色的特性和行为解释方法。
6.解释三基色原理。
三基色:任意互不相关(任意两种的组合不能产生三种的另一种颜色)的三种颜色构成颜色空间的一组基,三基色通过适当的混合能产生所有颜色。
7.解释加色模型和减色模型的概念。
加色模型:若颜色模型在颜色匹配时只需要将光谱光线直接组合而产生新的颜色类型这种颜色模型称为加色模型,形成的颜色空间称为加色空间减色模型:若颜色模型在匹配是某些可见光会被吸收而产生新的颜色类型,这种颜色模型称为减色模型,形成的颜色空间称为减色空间。
8.RGB表示模型中(1,0,0)(1,1,1)(0,0,0)(0.5,0.5,0.5)分别表示什么颜色?红白黑灰第二章计算机图形的显示与生成1.有哪两种主流的扫描显示方式?光栅扫描随机扫描2.解释屏幕分辩率的概念。
荧光屏在水平方向和垂直方向单位长度上能识别的最大光点数称为分辨率3.CRT产生色彩显示有哪两种技术?分别进行解释。
电子束穿透法:用红—绿两层荧光层涂覆在CRT荧光屏的内层,而不同速度的电子束能穿透不同的荧光粉层而发出不同颜色的光。
荫罩法:在荧光屏每个光点处呈三角形排列着红绿蓝三种颜色的荧光点,三支电子枪分别对应三个荧光点,调节各电子枪发出的电子束强度,即可控制各光点中三个荧光点所发出的红绿蓝三色光的强度。
第 1 章线性空间和线性变换(详解)1-1证:用 E ii表示n阶矩阵中除第i行,第i列的元素为 1外,其余元素全为 0 的矩阵 . 用E ij(i j , i1,2,, n1) 表示n阶矩阵中除第 i 行,第 j 列元素与第 j 行第 i 列元素为1 外,其余元素全为0的矩阵.显然, E ii,E ij都是对称矩阵, E ii有 n( n1)个.不难证明E ii,E ij是线性无关的,2且任何一个对称矩阵都可用这n+ n( n1)= n( n 1)个矩阵线性表示,此即对称矩阵组成n(n 1)维线性空间 .222同样可证所有n 阶反对称矩阵组成的线性空间的维数为n(n 1).2评注 : 欲证一个集合在加法与数乘两种运算下是一个n(n 1)维线性空间,只需找出n(n 1)个向量线性无关,并且集合中任何一个向量都可以用这2n(n 1)个向量线性表示即22可.1-2 解:令x1 1 x2 2x3 3x4 4解出 x1 , x2 , x3, x4即可.1-3解:方法一设A x1E1x2E2x3E3x4E4即12111111100 3x1 1 1x2 1 0x3 0 0x4 00故1 2x1x2x3x4x1x2x303x1x2x1于是x1x2x3x41, x1x2x3 2x1x20, x13解之得x1 3, x23, x32, x41A E,E,E,E(3, 3,2,1)T方法二应用同构的概念,R2 2是一个四维空间,并且可将矩阵 A 看做(1,2,0,3)T,E1,E2, E3, E4可看做(1,1,1,1)T,(1,1,1,0)T,(1,1,0,0)T,(1,0,0,0)T.于是有1111110003111020100311000001021000300011因此 A 在E1,E2,E3,E4下的坐标为(3,3,2,1)T.1-4 解:证:设k1 1k22k33k440即11111110k1 1 1k2 0 1k3 1 0k4 1 1k1k2 k3k4k1k2k3k1k3k4k1k2k4于是k1k2k3k40,k1k2k30k1k3k40, k1k2k40解之得k1k2k3k40故α,α,α,α 线性无关.1234设a b11x211x31110c d x110110x41 11x1x2x3x4x1x2x3x1x3x4x1x2x4于是x1x2x3x40, x1x2x30x1x3x40, x1x2x40解之得x1b c d2a, x2a cx3 a d , x4a bx1, x2 , x3 , x4即为所求坐标.1-5 解:方法一(用线性空间理论计算)1p( x) 1 2x31,x, x2, x302y123y 21,x 1,( x 1) ,( x1)y3y4又由于1,x1,( x1)2 ,( x1)311111,x, x2 , x30123 0013 0001于是 p( x) 在基1, x1,( x1)2 ,( x1)3下的坐标为y11111113y2012306y3001306y4000122方法二将 p(x) 12x3根据幂级数公式按x 1 展开可得p( x) 1 2x3p(1)p (1)(x1)p (1) (x1)2p (1)( x1)32!3!36(x1)6(x1)22(x1)3因此 p( x) 在基1, x1,( x1)2 ,( xT 1)3下的坐标为3,6,6, 2.评注:按照向量坐标定义计算,第二种方法比第一种方法更简单一些.1-6 解:①设β,β,β,βα,α,α,αP将 α1,α2 ,α3, α4 与 β1, β2, β3,β4 代入上式得2 0 5 6 1 0 0 1 13 3 6 1 1 0 01 12 1 0 1 1 P0 1 01 30 1 1故过渡矩阵10 01 10 5 62 P1 1 0 0 1 3 3 61 10 1 1 2 10 0 1 1 10 1 3121 22231 5 42 211 9 52 232 11 82 2②设1y 1ξ0 β β β β y 21 ( 1, 2, 3 , 4 )y 3y 4将 β1, β2, β3, β4 坐标代入上式后整理得719 y 1 2 0 5 6 1 8 y 2 1 3 3 6 0 27 y 3 1 1 2 1 1 1 y 411 33 227评注 :只需将iβ1,β2 ,β3, β41,2,3,4P计算出, β代入过渡矩阵的定义α α α α P .1-7 解:因为span{ α1, α2}span{ β1,β2}span{ α1, α2, β1,β2}由于秩 span{ α1,α2 , β1, β2}3 ,且α1, α2, β1是向量α1, α2, β1,β2的一个极大线性无关组,所以和空间的维数是3,基为α1,α2,β1.方法一设ξ span{α1,α2}span{ β1, β2} ,于是由交空间定义可知112121k31k41k1k210130117解之得k1l2 , k24l2 ,l13l2 (l2为任意数)于是ξ k1α1k2α2l 2[5,2,3,4] T( 很显然ξl1 1l2 2 )所以交空间的维数为 1,基为[5,2,3,4] T.方法二不难知span{ α1,α2}span{ α1,α2}, span{ β1,β2} span{ β1, β2}其中α[ 2, 2,0,1] T, β[13,2,1,0] T.又span{ α1,α2 }也是线性方程组223x1x32x4x22x3x4的解空间 . span{β1,β2}是线性方程组x113x32x4 3x22x3x4的解空间,所以所求的交空间就是线性方程组x 1 x 3 2x 4x 2 2x 3 x 4x 1 13x 3 2x 4x 2 32x 3x 4的解空间,容易求出其基础解系为[ 5,2,3,4] T ,所以交空间的维数为1,基为[ 5,2,3,4] T .评注:本题有几个知识点是很重要的.(1)span{ α1,α2 , , αn } 的 基 底 就 是α1, α2, , αn 的极大线性无关组. 维数等于秩{ α1,α2 ,,αn } . (2) span{α1, α2} span{ β1, β2} span{ α1,α2 , β1, β2} . (3) 方法一的思路,求交span{ α,α} span{ β, β} 就是求向量 ,既可由 α, α 线性表121 2ξ1 2示,又可由 β, β线性表示的那部分向量 . (4) 方法二是借用“两个齐次线性方程1 2组解空间的交空间就是联立方程组的解空间” ,将本题已知条件改造为齐次线性方程组来求解 .1-8 解:(1):解出方程组 (Ⅰ)x 1 2x 2 x 3 x 45x 1 10x 2 6x 3的基础解系 ,即是 V 1 的基 ,4 x 4 0解出方程组 (Ⅱ) x 1x 2 x 3 2 x 4 0 的基础解系 ,即是 V 2 的基 ;x 12x 2 x 3x 4 0(2): 解出方程组5x 1 10 x 2 6x 3 4 x 4 0 的基础解系 ,即为 V 1V 2的基 ;x 1 x 2x 32x 4 0(3): 设 V 1 span 1,,k,V 2 span1 ,, l ,则1 ,, k ,1 ,, l 的极大无关组即是V 1 V 2 的基 . 1-9 解 : 仿上题解 .1-10 解 : 仿上题解 . 1-11 证:设l 0ξ l 1A (ξ) l 2A2(ξ)l k 1Ak 1(ξ) 0①用 A k 1 从左侧成 ① 式两端,由 A k (ξ) 0 可得l 0A k 1 (ξ) 0因为 A k 1 (ξ) 0 ,所以 l 00,代入 ①可得l 1A (ξ) l 2A 2 (ξ)l k 1A k 1 (ξ) 0②用k 2kA从左侧乘②式两端,由Aξ0可 得 l0 0,继续下去,可得( )l 2l k 1 0 ,于是 ξ,A (ξ), A 2 (ξ), ,A k 1(ξ) 线性无关 .1-12解:由 1-11可知, n 个向量 ξ 0,A ( ),A2(ξ),,An 1 (ξ)线性无关,它是 V 的ξ一个基 . 又由ξξ2ξ,An 1ξA [,A( ),A( ),( )][A (ξ),A 2(ξ), ,A n 1(ξ)][A (ξ),A2(ξ),,An 1(ξ),0]0 0 0 010 0 ξξ2ξ ,An 1ξ 0 1[,A (),A( ),( )]0 0 0 010 n n所以 A在, (ξ),A 2(ξ), ,An 1(ξ)下矩阵表示为 n 阶矩阵ξA0 0 0 01 0 0 00 10 00 0 0 0 n0 01V 中任何一组 n个线性无关的向量组都可以构成V 的一个基,评注 : 维线性空间 因此 ξ,(ξ), A 2(ξ), ,A n1(ξ)是 V 的一个基 .A1-13 证: 设 1, , r , , s1 , , m A, A 1, , r , , s设 1 , , r 是 1,, r ,, s 的极大无关组,则可以证明1,, r 是 1, , r,,s 的极大无关组 .1-14 解: (1) 由题意知A [α1, α2,α3 ] [ α1,α2 ,α3] A1 1 1[β, β, β] [ α,α , α ] 0 1 11 231 230 0 1设 A在基 β1, β2, β3下的矩阵表示是 B ,则1 1 112 3 1 1 11BP 1AP 01 11 0 3 0 1 10 0 1 2 1 5 0 0 12 4 434 6238(2) 由于 A0 ,故 AX 0 只有零解,所以 A的核是零空间 . 由维数定理可知A 的值域是线性空间 R 3 .1-15 解 :已知 A1,2,31,2,3A(1) 求得式 1 , 2 , 3 1 ,2 ,3 P 中的过渡矩阵 P ,则BP 1AP 即为所求 ; (2) 仿教材例 1.5.1.(见<矩阵分析 >史荣昌编著 .北京理工大学出版社 .)1-16 解 :设 A1 ,2 ,3 , 则 R( A)span1 ,2 ,3 ; N ( A) 就是齐次方程组 Ax的解空间 .1-17 证 :由矩阵的乘法定义知AB 与 BA 的主对角线上元素相等 , 故知 AB 与 BA 的迹相等 ; 再由 1-18题可证 .1-18 证 :对 k 用数学归纳法证。